Machine Learning
2026-03-18
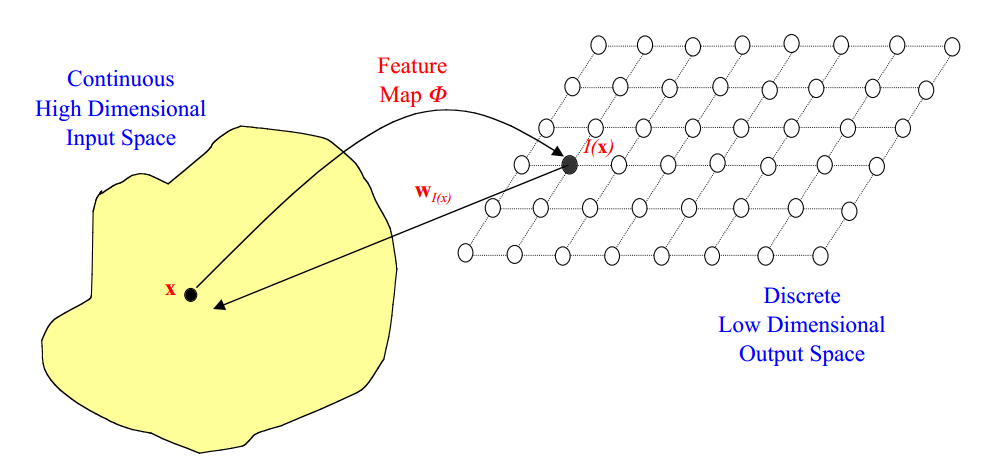
什么是自组织映射? 一个特别有趣的无监督系统是基于 竞争性学习 ,其中输出神经元之间竞争激活,结果是在任意时间只有一个神经元被激活。这个激活的神经元被称为 胜者神经元(winner-takes-all neuron) 。这种竞争可以通过在神经元之间具有 横向抑制连接 (负反馈路径)来实现。其结果是神经元被迫对自身进行重新组合,这样的网络我们称之为 自组织映射(Self Organizing Map,SOM) 。 拓扑映射 神经生物学研究表明,不同的感觉输入(运动,视觉,听觉等)以 有序的方式 映射到大脑皮层的相应区域。 这种映射我们称之为 拓扑映射 ,它具有两个重要特性: 在表示或处理的每个阶段,每一条传入的信息都保存在适当的上下文(相邻节点)中 处理密切相关的信息的神经元之间保持密切,以便它们可以通过短突触连接进行交互 我们的兴趣是建立人工的拓扑映射,以神经生物学激励的方式通过自组织进行学习。 我们将遵循 拓扑映射形成的原则 :“拓扑映射中输出层神经元的空间位置对应于输入空间的特定域或特征”。 建立自组织映射 SOM的主要目标是将任意维度的输入信号模式 转换...