Large Model
2026-03-10
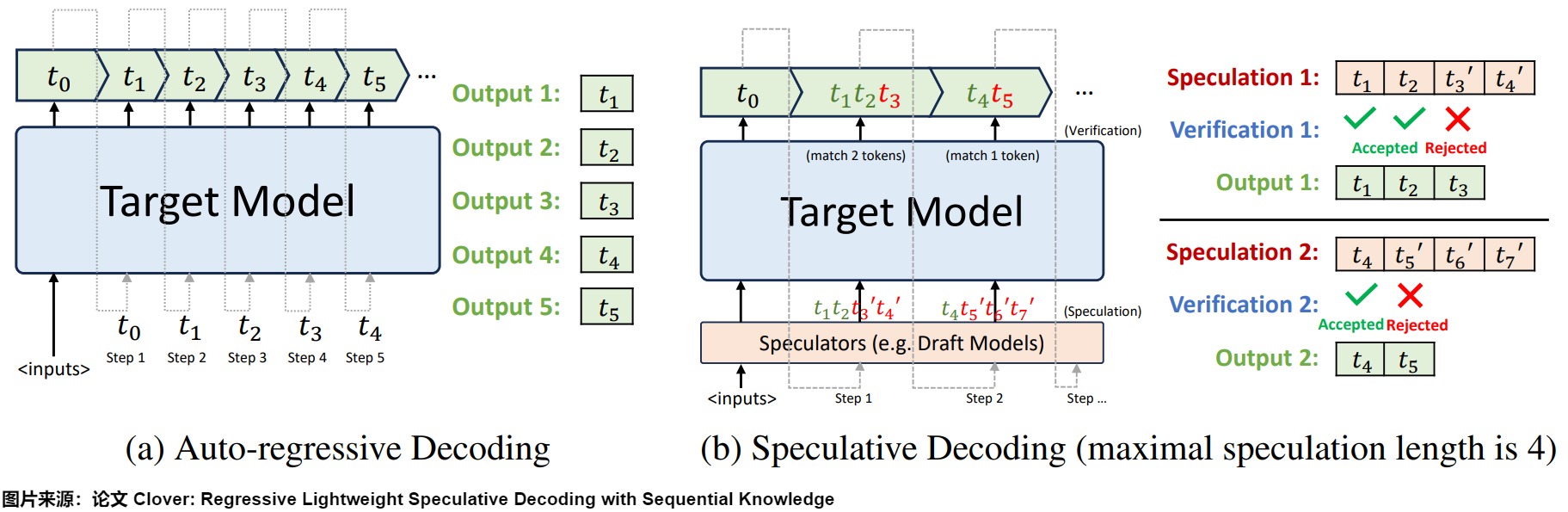
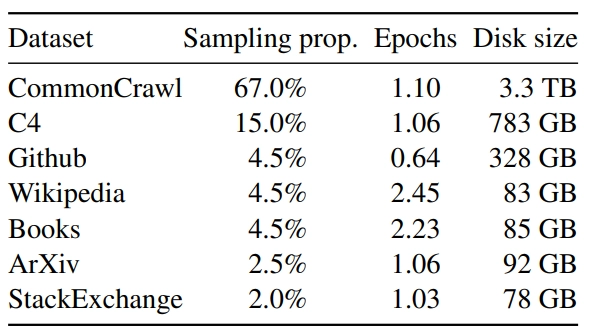
概述 投机解码(Speculative Decoding)也叫预测解码/投机采样,它会利用小模型来预测大型模型的行为,从而提升模型在解码(decoding)阶段的解码效率问题,加速大型模型的执行。其核心思路如下图所示,首先以低成本的方式(以小模型为主,也有多头,检索,Early Exit 等方式)快速生成多个候选 Token(串行序列、树、多头树等),然后通过一次并行验证阶段快速验证多个 Token的正确性,只要平均每个 Step 验证的 Token 数 > 1,就可以一次性生成多个token,进而减少总的 Decoding 步数,实现加速的目的。 下图左侧是自回归解码模型,右侧是投机解码机制。 从本质上来说,投机解码希望在推理阶段在不大幅度改变模型的情况下,通过更好利用冗余算力来并行"投机"地猜测出模型接下来要输出的token。作为对比,也有一种方案是通过路由的方式组合多个不同规模和性能的模型。路由方式在调用之前已经确定好需要调用哪个模型,直到调用结束。而投机解码在一个 Query 内会反复调用大小模型。 背景 我们都知道,生成式 LLM 大部分是 Decoder-only...