Batch Normalization
什么是批归一化(Batch Normalization)
以前在神经网络训练中,只是对输入层数据进行归一化处理,却没有在中间层进行归一化处理。要知道,虽然我们对输入数据进行了归一化处理,但是输入数据经过 **\(\sigma(WX+b)\)这样的矩阵乘法以及非线性运算之后,其数据分布很可能被改变,而随着深度网络的多层运算之后,数据分布的变化将越来越大**。如果我们能在网络的中间也进行归一化处理,是否对网络的训练起到改进作用呢?答案是肯定的。
这种在神经网络中间层也进行归一化处理,使训练效果更好的方法,就是批归一化Batch Normalization(BN)。
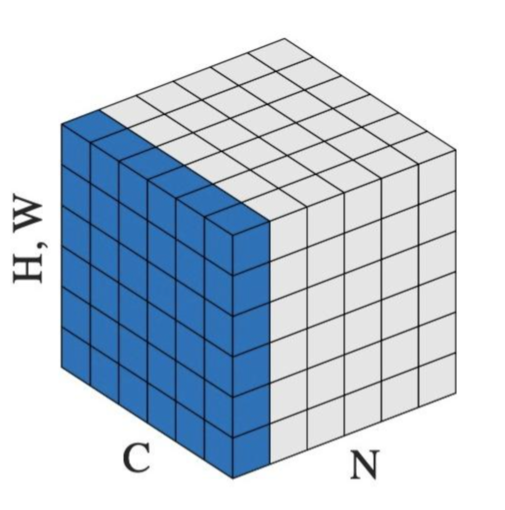
其作用在整个mini-batch上,沿着\(C\)维度对\(N,H,W\)三个维度进行归一化。具体来说,就是把第1个样本的第1个通道,加上第2个样本第1个通道 ...... 加上第 \(N\) 个样本第1个通道,求平均,得到通道 1 的均值(注意是除以 \(N×H×W\) 而不是单纯除以 \(N\),最后得到的是一个代表这个 batch 第1个通道平均值的数字,而不是一个 \(H×W\) 的矩阵)。求通道 1 的方差也是同理。对所有通道都施加一遍这个操作,就得到了所有通道的均值和方差。
# coding;utf8
import torch
from torch import nn
# track_running_stats=False,求当前 batch 真实平均值和标准差,
# s
# affine=False, 只做归一化,不乘以 gamma 加 beta(通过训练才能确定)
# num_features 为 feature map 的 channel 数目
# eps 设为 0,让官方代码和我们自己的代码结果尽量接近
bn = nn.BatchNorm2d(num_features=3, eps=0, affine=False, track_running_stats=False)
x = torch.randn(10, 3, 5, 5)*10000 #x.shape:[10,3,5,5]
official_bn = bn(x)
# 把 channel 维度单独提出来,而把其它需要求均值和标准差的维度融合到一起
# x.permute(1, 0, 2, 3).shape: [c,n,h,w]
# x.permute(1, 0, 2, 3).contiguous(): [c,n,h,w]
# x.permute(1, 0, 2, 3).contiguous().view(3, -1): [c, n x h x w]
# x1 = x.permute(1, 0, 2, 3).contiguous().view(3, -1)
x1 = x.transpose(0,1).contiguous().view(3,-1)
# x1.mean(dim=1).shape: [3]
mu = x1.mean(dim=1).view(1, 3, 1, 1)
# unbiased=False, 求方差时不做无偏估计(除以 N-1 而不是 N),和原始论文一致 unbiased = False
# x1.std(dim=1).shape: [3]
std = x1.std(dim=1, unbiased=False).view(1, 3, 1, 1)
my_bn = (x - mu)/std
diff = (official_bn - my_bn).sum()
print(my_bn)
print('diff={}'.format(diff))如何理解 Internal Covariate Shift?
深度神经网络模型的训练为什么会很困难?其中一个重要的原因是,深度神经网络涉及到很多层的叠加,而每一层的参数更新会导致上层的输入数据分布发生变化,通过层层叠加,高层的输入分布变化会非常剧烈,这就使得高层需要不断去重新适应底层的参数更新。为了训好模型,我们需要非常谨慎地去设定学习率、初始化权重、以及尽可能细致的参数更新策略。
Google 将这一现象总结为 Internal Covariate Shift,简称 ICS。 什么是 ICS 呢?
大家都知道在统计机器学习中的一个经典假设是“源空间(source domain)和目标空间(target domain)的数据分布(distribution)是一致的”。如果不一致,那么就出现了新的机器学习问题,如 transfer learning / domain adaptation 等。而 covariate shift 就是分布不一致假设之下的一个分支问题,它是指源空间和目标空间的条件概率是一致的,但是其边缘概率不同。
大家细想便会发现,的确,对于神经网络的各层输出,由于它们经过了层内操作作用,其分布显然与各层对应的输入信号分布不同,而且差异会随着网络深度增大而增大,可是它们所能“指示”的样本标记(label)仍然是不变的,这便符合了covariate shift的定义。由于是对层间信号的分析,也即是“internal”的来由。
那么ICS会导致什么问题?
简而言之,每个神经元的输入数据不再是“独立同分布”。
其一,上层参数需要不断适应新的输入数据分布,降低学习速度。
其二,下层输入的变化可能趋向于变大或者变小,导致上层落入饱和区,使得学习过早停止。
其三,每层的更新都会影响到其它层,因此每层的参数更新策略需要尽可能的谨慎。
BN训练流程
下面给出 BN 算法在训练时的过程
输入:上一层输出结果\(X = {x_1, x_2, ..., x_m}\) ,学习参数\( \gamma, \beta \)
算法流程:
- 计算上一层输出数据的均值 \( \mu_{\beta} = \frac{1}{m} \sum_{i=1}^m(x_i)\),其中, \(m\) 是此次训练样本 batch 的大小。
- 计算上一层输出数据的标准差\( \sigma_{\beta}^2 = \frac{1}{m} \sum_{i=1}^m (x_i - \mu_{\beta})^2 \)
- 归一化处理, 得到\( \hat x_i = \frac{x_i + \mu_{\beta}}{\sqrt{\sigma_{\beta}^2} + \epsilon} \),其中 \( \epsilon \) 是为了避免分母为 0 而加进去的接近于 0 的很小值
- 重构,对经过上面归一化处理得到的数据进行重构,得到\( y_i = \gamma \hat x_i + \beta \):,其中\( \gamma, \beta \), 为可学习参数。
- 注:上述是 BN 训练时的过程,但是当在测试时,往往只是输入一个样本,没有所谓的均值 \( \mu_{\beta} \)和标准差 \( \sigma_{\beta}^2 \)。此时,均值 \( \mu_{\beta} \) 是计算所有 batch \( \mu_{\beta} \)值的平均值得到,标准差 \( \sigma_{\beta}^2 \)采用每个batch \( \sigma_{\beta}^2 \)的无偏估计得到。
BN的测试流程
在训练过程里,我们等一个batch的数据都装满之后,再把数据装入模型,做BN。但是在测试过程中,我们却更希望模型能来一条数据就做一次预测,而不是等到装满一个batch再做预测。也就是说,我们希望测试过程共的数据不依赖batch,每一条数据都有一个唯一预测结果。这就产生了训练和测试中的gap:测试里的\(\mu, \sigma\) 要怎么算呢?一般来说有两种方法。
- 用训练集中的均值和方差做测试集中均值和方差的无偏估计
保留训练模型中,每一组batch的每一个特征在每一层的\(\mu_{batch}, \sigma^2_{batch}\) ,这样我们就可以得到测试数据均值和方差的无偏估计:
其中\(m\)表示的是批量大小。
这种做法有一个明显的缺点:需要消耗较大的存储空间,保存训练过程中所有的均值和方差结果(每一组,每一个,每一层)。
- Momentum:移动平均法(Moving Average)
稍微改变一下训练过程中计算均值和方差的办法,设\(\mu_{t}\)是当前步骤求出的均值,\(\bar \mu\) 是之前的训练步骤累积起来求得的均值(也称running mean),则:
其中,\(p\)是momentum的超参,表示模型在多大程度上依赖于过去的均值和当前的均值。\(\bar\mu\) 则是新一轮的ruuning mean,也就是当前步骤里最终使用的mean。同理,对于方差,我们也有:
采用这种方法的好处是:
- 节省了存储空间,不需要保存所有的均值和方差结果,只需要保存running mean和running variance即可
- 方便在训练模型的阶段追踪模型的表现。一般来讲,在模型训练的中途,我们会塞入validation dataset,对模型训练的效果进行追踪。采用移动平均法,不需要等模型训练过程结束再去做无偏估计,我们直接用running mean和running variance就可以在validation上评估模型。
BN的优势
- 通过解决ICS的问题,使得每一层神经网络的输入分布稳定,在这个基础上可以使用较大的学习率,加速了模型的训练速度
- 起到一定的正则作用,进而减少了dropout的使用。当我们通过BN规整数据的分布以后,就可以尽量避免一些极端值造成的overfitting的问题
- 使得数据不落入饱和性激活函数(如sigmoid,tanh等)饱和区间,避免梯度消失的问题
大反转:著名深度学习方法BN成功的秘密竟不在ICS?
以解决ICS为目的而提出的BN,在各个比较实验中都取得了更优的结果。但是来自MIT的Santurkar et al. 2019却指出:
- 就算发生了ICS问题,模型的表现也没有更差
- BN对解决ICS问题的能力是有限的
- BN奏效的根本原因在于它让optimization landscape更平滑
而在这之后的很多论文里也都对这一点进行了不同理论和实验的论证。
(每篇论文的Intro部分开头总有一句话类似于:“BN的奏效至今还是个玄学”。。。)
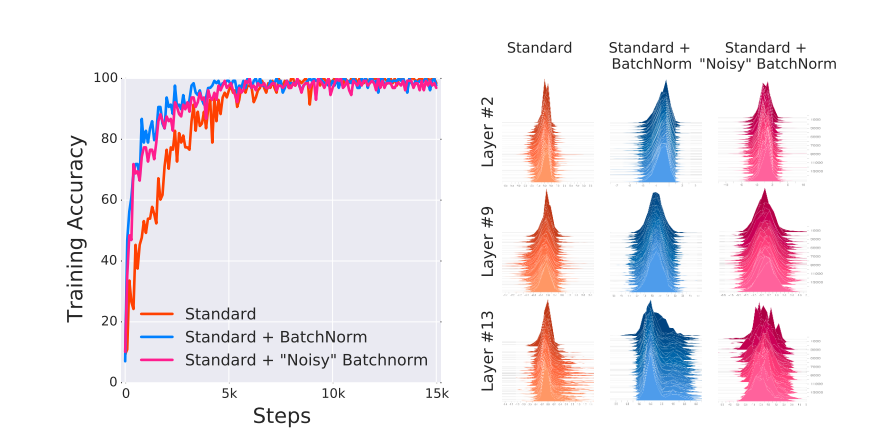
图中是VGG网络在标准,BN,noisy-BN下的实验结果。其中noisy-BN表示对神经网络的每一层输入,都随机添加来自分布(non-zero mean, non-unit variance)的噪音数据,并且在不同的timestep上,这个分布的mean和variance都在改变。noisy-BN保证了在神经网络的每一层下,输入分布都有严重的ICS问题。但是从试验结果来看,noisy-BN的准确率比标准下的准确率还要更高一些,这说明ICS问题并不是模型效果差的一个绝对原因。
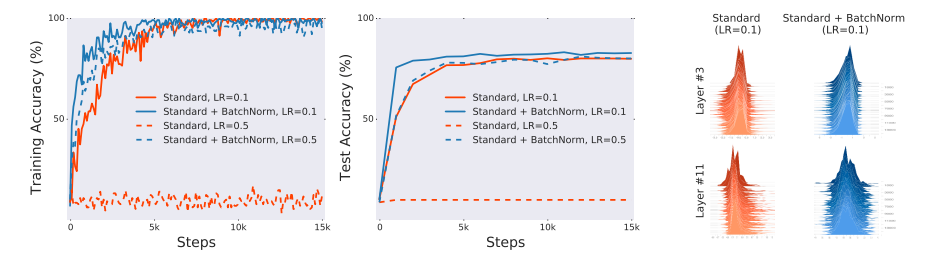
而当用VGG网络训练CIFAR-10数据时,也可以发现,在更深层的网络(例如Layer11)中,在采用BN的情况下,数据分布也没有想象中的“规整”:
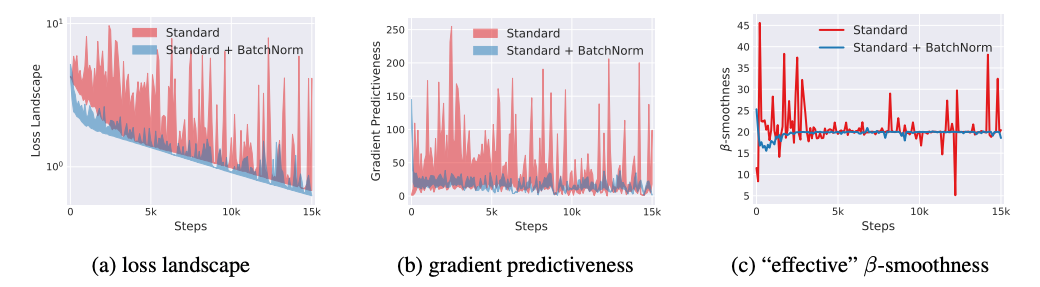
最后,在VGG网络上,对于不同的训练step,计算其在不同batch上loss和gradient的方差(a和b中的阴影部分),同时测量\(\beta-smoothness\) (简答理解为l2-norm表示的在一个梯度下降过程中的最大斜率差)。可以发现BN相较于标准情况都来得更加平滑。
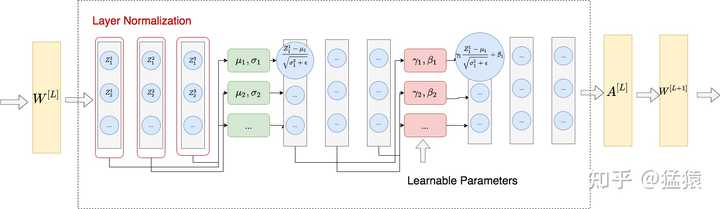
Layer Normalization
BN提出后,被广泛作用在CNN任务上来处理图像,并取得了很好的效果。针对文本任务,Ba et al. 2016 提出在RNN上使用Layer Normalization(以下简称LN)的方法,用于解决BN无法很好地处理文本数据长度不一的问题。例如采用RNN模型+BN,我们需要对不同数据的同一个位置的token向量计算\(\mu, \sigma^2\) ,在句子长短不一的情况下,容易出现:
- 测试集中出现比训练集更长的数据,由于BN在训练中累积\(\mu_{batch}, \sigma^2_{batch}\) ,在测试中使用累计的经验统计量的原因,导致测试集中多出来的数据没有相应的统计量以供使用。 (在实际应用中,通常会对语言类的数据设置一个max_len,多裁少pad,这时没有上面所说的这个问题。但这里我们讨论的是理论上的情况,即理论上,诸如Transformer这样的模型,是支持任意长度的输入数据的)
- 长短不一的情况下,文本中的某些位置没有足够的batch_size的数据,使得计算出来的\(\mu, \sigma^2\) 产生偏差。例如Shen et al. (2020)就指出,在数据集Cifar-10(模型RestNet20)和IWLST14(模型Transformer)的训练过程中,计算当前epoch所有batch的统计量\(\mu_{B}, \sigma^2_{B}\) 和当前累计(running)统计量\(\mu, \sigma^2\) 的平均Euclidean distance,可以发现文本数据较图像数据的分布差异更大:
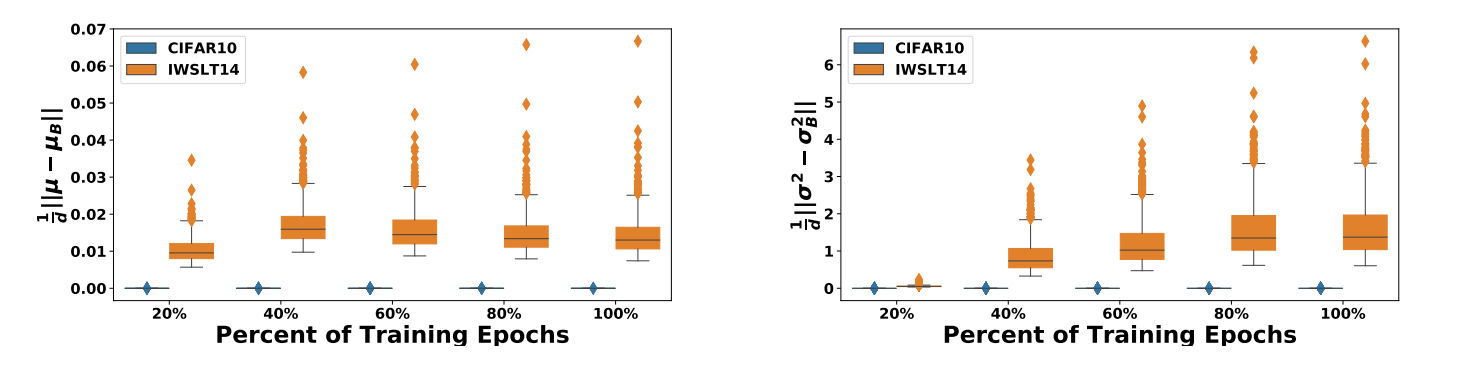
这是一个结合实验的解释,而引起这个现象的原因,可能不止是“长短不一”这一个,也可能和数据本身在某一维度分布上的差异性有关。
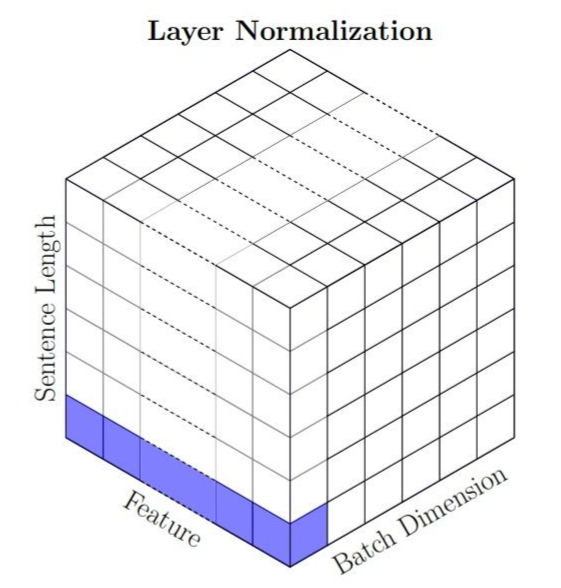
LN不再对mini-batch中的所有特征计算均值和方差,而是沿着batch维度对\(CHW\)三个维度进行归一化操作,从而克服了BN操作对于batch size大小比较敏感的缺点,非常适用于RNN网络的加速训练。
# coding;utf8
import torch
from torch import nn
x = torch.randn(10, 3, 5, 5)*10000 #x.shape:[10,3,5,5]
# normalization_shape 相当于告诉程序这本书有多少页,每页多少行多少列
# eps=0 排除干扰
# elementwise_affine=False 不作映射
# 这里的映射和 BN 以及下文的 IN 有区别,它是 elementwise 的 affine,
# 即 gamma 和 beta 不是 channel 维的向量,而是维度等于 normalized_shape 的矩阵
ln = nn.LayerNorm(normalized_shape=[3,5,5], eps=0, elementwise_affine = False)
official_ln = ln(x)
# 把 channel 维度单独提出来,而把其它需要求均值和标准差的维度融合到一起
x1 = x.contiguous().view(10, -1)
# x1.mean(dim=1).shape: [10]
mu = x1.mean(dim=1).view(10, 1, 1, 1)
# unbiased=False, 求方差时不做无偏估计(除以 N-1 而不是 N),和原始论文一致 unbiased = False
# x1.std(dim=1).shape: [3]
std = x1.std(dim=1, unbiased=False).view(10, 1, 1, 1)
my_ln = (x - mu)/std
diff = (official_ln - my_ln).sum()
print(my_ln)
print('diff={}'.format(diff))思路
整体做法类似于BN,不同的是LN不是在特征间进行标准化操作(横向操作),而是在整条数据间进行标准化操作(纵向操作)。
在图像问题中,LN是指对一整张图片进行标准化处理,即在一张图片所有channel的pixel范围内计算均值和方差。而在NLP的问题中,LN是指在一个句子的一个token的范围内进行标准化。
训练过程和测试过程中的LN
LN使得各条数据间在进行标准化的时候相互独立,因此LN在训练和测试过程中是一致的。LN不需要保留训练过程中的\(\mu, \sigma^2\) ,每当来一条数据时,对这条数据的指定范围内单独计算所需统计量即可。
Instance Normalization
Instance Normalization (IN) 最初用于图像的风格迁移。作者发现,在生成模型中, feature map 的各个 channel 的均值和方差会影响到最终生成图像的风格,因此可以先把图像在 channel 层面归一化,然后再用目标风格图片对应 channel 的均值和标准差“去归一化”,以期获得目标图片的风格。
IN 操作也在单个样本内部进行,不依赖 batch。
对于\(x\in \mathcal{R}^{N\times C\times H\times W}\),IN 对每个样本的 H、W 维度的数据求均值和标准差,保留 N 、C 维度,也就是说,它只在 channel 内部求均值和标准差.
import torch
from torch import nn
x = torch.rand(10, 3, 5, 5) * 10000
# track_running_stats=False,求当前 batch 真实平均值和标准差,
# 而不是更新全局平均值和标准差
# affine=False, 只做归一化,不乘以 gamma 加 beta(通过训练才能确定)
# num_features 为 feature map 的 channel 数目
# eps 设为 0,让官方代码和我们自己的代码结果尽量接近
In = nn.InstanceNorm2d(num_features=3, eps=0, affine=False, track_running_stats=False)
offcial_in = In(x)
x1 = x.view(30, -1)
mu = x1.mean(dim=1).view(10, 3, 1, 1)
std = x1.std(dim=1, unbiased=False).view(10, 3, 1, 1)
my_in = (x - mu)/std
diff = (my_in - offcial_in).sum()
print('diff={}'.format(diff))Group Normalization
Group Normalization (GN) 适用于占用显存比较大的任务,例如图像分割。对这类任务,可能 batchsize 只能是个位数,再大显存就不够用了。而当 batchsize 是个位数时,BN 的表现很差,因为没办法通过几个样本的数据量,来近似总体的均值和标准差。GN 也是独立于 batch 的,它是 LN 和 IN 的折中。GN 计算均值和标准差时,把每一个样本 feature map 的 channel 分成 G 组,每组将有 C/G 个 channel,然后将这些 channel 中的元素求均值和标准差。各组 channel 用其对应的归一化参数独立地归一化。
import torch
from torch import nn
x = torch.rand(10, 20, 5, 5)*10000
# 分成 4 个 group
gn = nn.GroupNorm(num_groups=4, num_channels=20, eps=0, affine=False)
official_gn = gn(x)
#把同一个group的元素融合到一起
# 分成 4 个 group
x1 = x.view(10, 4, -1)
mu = x1.mean(dim=-1).reshape(10, 4, -1)
std = x1.std(dim=-1).reshape(10, 4, -1)
x1_norm = (x1 - mu)/std
my_gn = x1_norm.reshape(10, 20, 5, 5)
diff = (my_gn - official_gn).sum()
print('diff={}'.format(diff))RMSNorm
文章指出,尽管 LayerNorm 带来了训练稳定性和速度的提升,但它也引入了额外的计算开销:
- 计算开销问题:
- 对于小型和浅层神经网络,LayerNorm 的计算开销可以忽略不计
- 但随着网络规模和深度增加,这个问题变得严重
- 效率权衡:
- 优点:LayerNorm 使训练更快速、更稳定(从训练步数角度)
- 缺点:每个训练步骤的计算成本增加
- 结果:净效率提升被削弱(如下图所示)
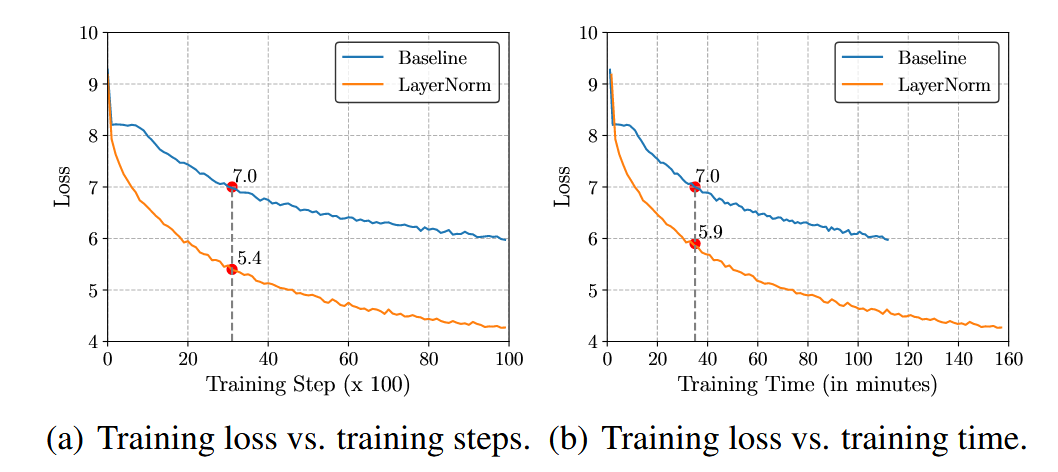
Layer Normalization计算效率低
RMSNorm主要面向Layer Norm改进,归一化可以实现张量的聚集(re-centering)和缩放(re-scaling),在RNN等变长序列处理上,L-N的计算与批次解耦,使模型能够更多的学习序列转化关系,B-N则会受到不同输入的影响,模型无法专注于序列转化。但L-N在计算成本和耗时上比较昂贵,如图1中,当基准模型的损失为7.0时,花费相同的步数和相同时间的L-N模型的损失是有差异的,相同时间(b)的损失为5.9,高于相同步数(a)的损失5.4。
RMSNorm
L-N可以通过均值 \(μ\) 上的计算实现去中心,通过方差 \(σ\) 上的计算实现缩放,依托于中心化,模型在输入和权重上出现噪声时依旧具有不变的分布(99个0和1个100,中心化后不会改变99个较小值与1个较大值的分布),但文中指出L-N对张量所做的聚集中心化(re-centering)并不能够使梯度的方差减小,L-N的成功跟其关系并不大。
L-N计算
L-N均值方差参数
RMSNorm舍弃了中心化操作,归一化过程只实现缩放,缩放系数是均方根(RMS),L-N的均值 \(μ\) 为0时便是RMSNorm,RMS所做的只是缩放,不会改变数据原本的分布,有利于激活函数输出的稳定(缩放不改变向量方向):
恒定&梯度(Invariance&Gradient Analysis)
不变性:
考虑输入和权重变化时,不同标准化因为采用方式不同,在不变性上的表现也有差异:
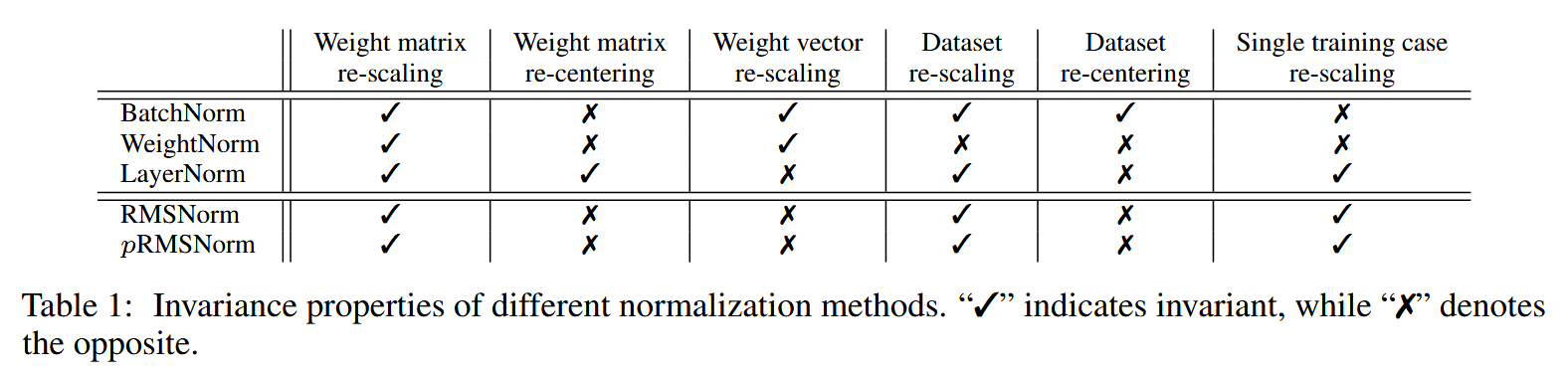
考虑以下RMSNorm一般形式:
其中,\(x\) 是输入向量, \(W\) 是权重矩阵:
RMSNorm 对权重矩阵和输入重新缩放都是不变的,因为 RMS 具有以下线性特性:
其中, \(\alpha\)是缩放因子, 假设权重矩阵按 \(δ\) 因子缩放( \(W^′=δW \)),输出不会受到影响:
梯度:
现有大多数神经网络的学习过程,都依赖基于梯度的方向传播来实现参数更新,因此梯度求解的鲁棒性是模型参数更新及收敛的重要依靠,从这一视角看归一化方法的成功不仅仅是增强了输入的稳定性,还来源于增加了优化空间的平滑度。
给定损失函数\(\mathcal{L}\),对于 \(\mathbf{b}\) 和 \(\mathbf{g}\) 的梯度有
其中 \(\mathbf{v}\) 代表 RMSNomr 中的 \(f(⋅)\) ,
\(\mathbf{g}\) 的梯度与RMS求和成比例,而不是直接与输入成比例,起到了平滑作用。对于权重 \(\mathbf{W}\) :
缩放 \(δ\) 作用在 \(\mathbf{R}\) :
由 \({\mathbf{R}}^{\prime } = \frac{1}{\delta }\mathbf{R}.\) ,权重矩阵的梯度与权重矩阵缩放程度负相关,从而减少梯度更新对于缩放程度的灵敏性,保证更新的平滑性和稳定性。
pRMSNorm
RMS具有线性特征,所以提出可以用部分数据的RMSNorm来代替全部的计算,pRMSNorm表示使用前p%的数据计算RMS值。\(k=n*p\) 表示用于RMS计算的元素个数。实测中,使用6.25%的数据量可以收敛
class RMSNorm(torch.nn.Module):
def __init__(
self,
dim: int,
eps: float = 1e-6,
add_unit_offset: bool = True,
):
super().__init__()
self.eps = eps
self.add_unit_offset = add_unit_offset
self.weight = nn.Parameter(torch.zeros(dim))
def _norm(self, x):
return x * torch.rsqrt(x.pow(2).mean(-1, keepdim=True) + self.eps)
def forward(self, x):
x = self._norm(x.float()).type_as(x)
if self.add_unit_offset:
output = x * (1 + self.weight)
else:
output = x * self.weight
return output