
简介 这篇文章的思路就是之前的工作都是在利用历史信息和当前时刻的信息,而这篇文章就是要预测未来的信息来结合历史信息做分类。整体框架采用的lstm。 方法 传统的RNN或者LSTM并不能接收未来的信息,所以作者设计了一个TRN Cell为一个循环单元,TRN Cell 的算法流程如下: 右侧的可以横过来看,输入是大lstm中的隐状态h(文中把大的lstm称作Encoder),以h为输入再经过小的lstm,将输出连接起来构成future信息。 再解释一下就是,endcoder中得到了时间t的信息,那以t的信息为输入,再经过序列lstm,每个输出就可以看作是对未来 t+1...t+l_d 的预测,这些预测再经过一个FC层和 t 时刻的结合起来,作用于encoder的下一时序。 从Loss的角度来说...
3D Model
2024-12-31
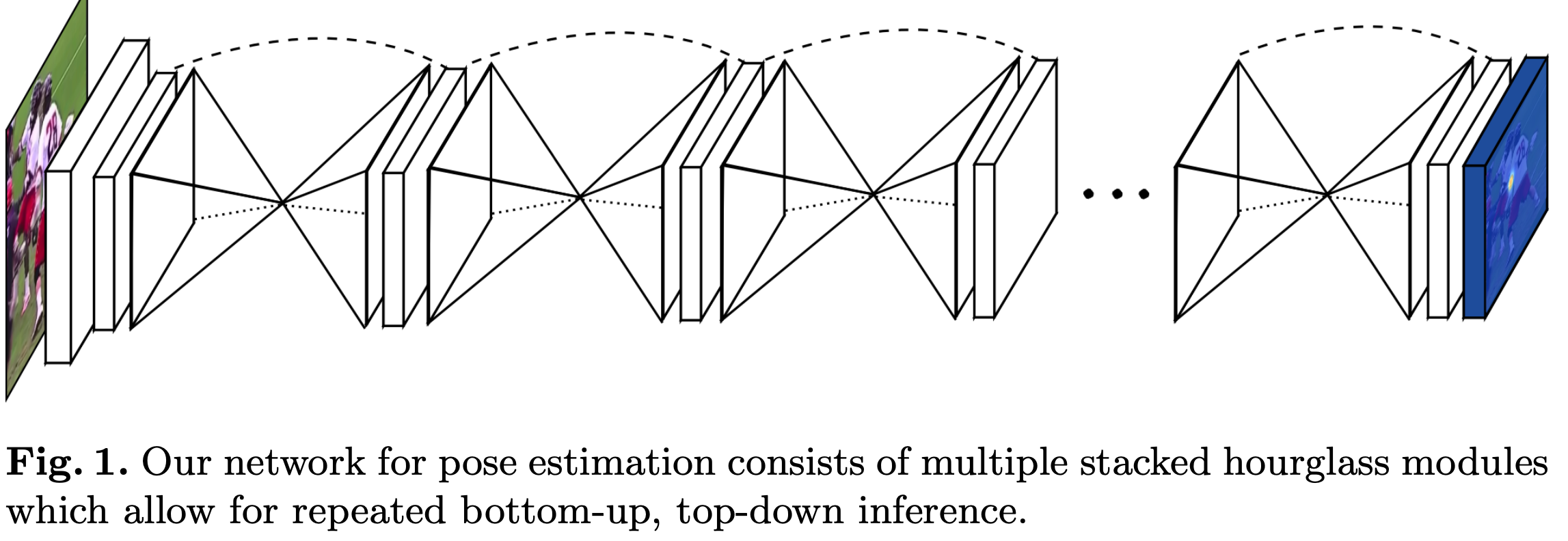
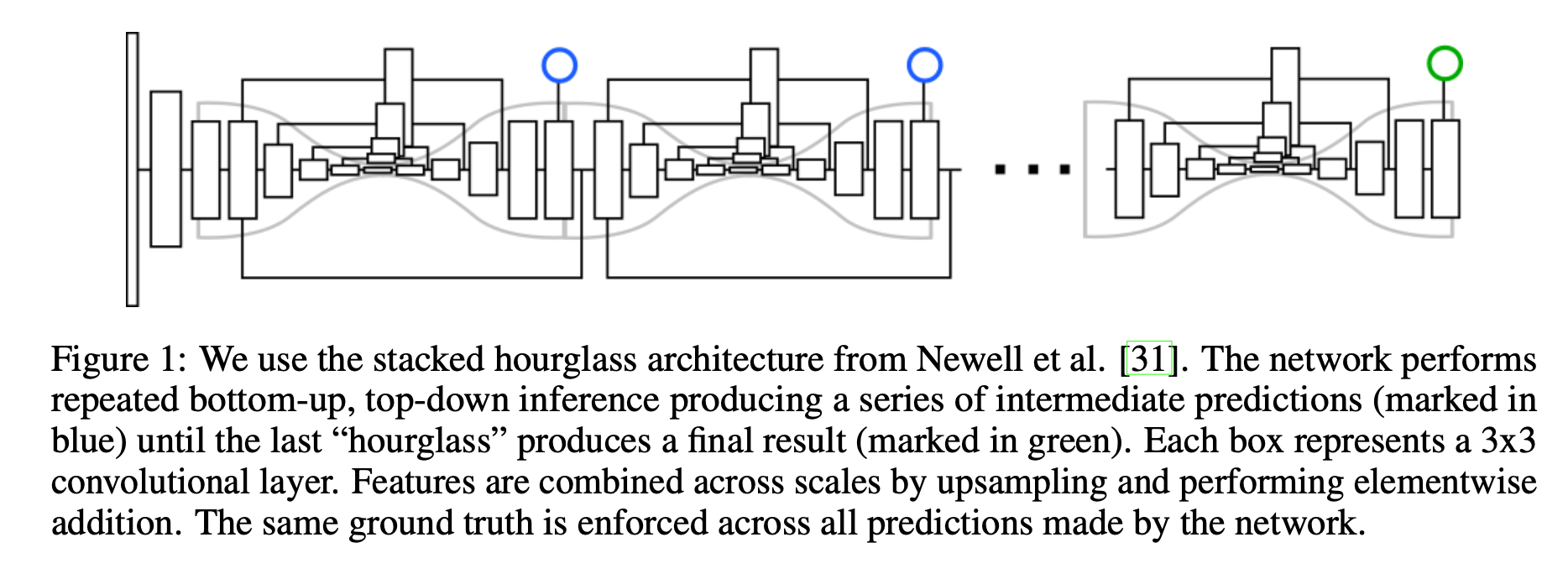
论文介绍了一种新的网络结构用于人体姿态检测,作者在论文中展现了不断重复bottomup、topdown过程以及运用intermediate supervison(中间监督)对于网络性能的提升,下面来介绍Stacked Hourglass Networks. 简介 理解人类的姿态对于一些高级的任务比如行为识别来说特别重要,而且也是一些人机交互任务的基础。作者提出了一种新的网络结构Stacked Hourglass Networks来对人体的姿态进行识别,这个网络结构能够捕获并整合图像所有尺度的信息。之所以称这种网络为Stacked Hourglass Networks,主要是它长得很像堆叠起来的沙漏,如下图所示: 这种堆叠在一起的Hourglass模块结构是对称的,bottomup过程将图片从...
简介 作者认为许多计算机视觉的任务可以看作是检测和分组问题检测一些小的单元,然后将它们组合成更大的单元,例如,多人目标检测可以通过检测人的关节点然后再将它们进行分组(属于同一个人的关节点为一组)解决;实例分割问题可以看作是检测一些相关的像素然后将它们组合成一个目标实例。 Associative Embedding是一种表示关节检测和分组任务的输出的新方法,其基本思想是为每次检测引入一个实数,用作识别对象所属组的“tag”,换句话说,标签将每个检测与同一组中的其他检测相关联。作者使用一个损失函数使得如果相应的检测属于ground truth中的相同组则促使这一对标签具有相似的值。需要注意的是,这里标签具体的值并不重要,重要的是不同标签之间的差异。 这篇其实是源自Stacked Hourglas...
3D Model
2024-12-31

三维空间中的旋转有很多种表示方式,欧拉角,旋转矩阵,旋转向量,四元数。由于在slam与机器人中会大量用到这方面的知识,所以在这里将此方面的知识总结一下,方便以后查阅。 欧拉角(Euler Angle) 欧拉角可以使用滑翔翼飞行器控制来理解,比如对于下面这张图,一般假设红色轴为z轴,则z轴表示空间的第三维,则去掉这一维度表示飞行器在一个二维平面上;蓝色轴为x轴,也是飞行器的朝向,因此绕此轴转动就像是飞行器在做翻滚动作,因此叫翻滚角(roll);绿色轴为y轴,绕这个轴转动其实就是飞机开始准备向上飞或者向下飞了,因此叫俯仰角(pitch);同理,绕红色轴也就是z轴转动代表飞机开始调整自身在二维平面上的朝向了,因此叫偏航角(yaw)。 在欧拉角的表示中,yaw、pitch、roll的顺序对旋转结果是...
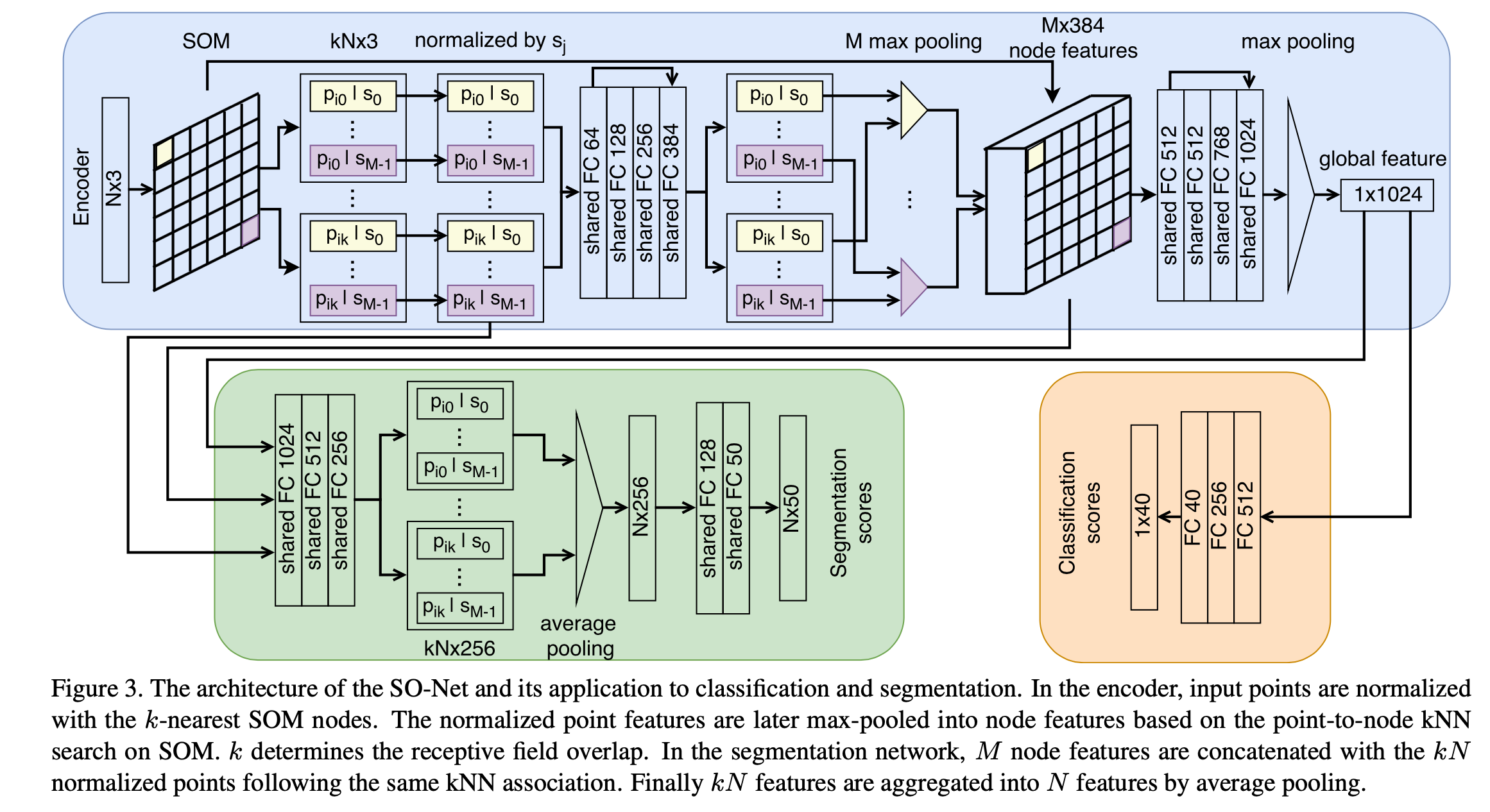
概括 针对一些网络在处理point cloud时的缺点,如:不能对点的空间分布进行建模(例如PointNet++,只是能获取局部信息不能得到局部区域之间的空间关系),提出了SONet。SO的含义是利用Selforganizing map的Net。 结果:它具有能够对点的空间分布进行建模、层次化特征提取、可调节的感受野范围的优点,并能够用于多种任务如重建、分类、分割等等。取得了相似或超过SOTA的性能,因为可并行化和架构简单使得训练速度很快。 贡献: TODO IDEA:作者发现将CNN直接用于SOM图上性能不升反降,为什么(推测:可能是SOM的2D map并不是保持了原本的空间对应关系,可能nodes之间是乱序的,导致用conv2d时精度反而降低)? 难点 如何对local regions之...

Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用(r, θ)两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的(r, θ),在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数(r, θ)就在每条曲线中都存在,所以看起来就像是多条曲线相交在(r,θ)。可以用多条曲线投票的方式来看,其他点都是很少的票数,而(r,θ)则票数很多,所以直线的参数就是(r,θ)。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数...

概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translationinvariance和permutationinvariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例...
3D Model
2024-12-31

三维深度学习简介 多视角(multiview):通过多视角二维图片组合为三维物体,此方法将传统CNN应用于多张二维视角的图片,特征被view pooling procedure聚合起来形成三维物体; 体素(volumetric):通过将物体表现为空间中的体素进行类似于二维的三维卷积(例如,卷积核大小为5x5x5),是规律化的并且易于类比二维的,但同时因为多了一个维度出来,时间和空间复杂度都非常高,目前已经不是主流的方法了; 点云(point clouds):直接将三维点云抛入网络进行训练,数据量小。主要任务有分类、分割以及大场景下语义分割; 非欧式(manifold,graph):在流形或图的结构上进行卷积,三维点云可以表现为mesh结构,可以通过点对之间临接关系表现为图的结构。 点云的特性...
引言 常用的自监督深度估计方法常使用(1)单帧信息;(2)多帧信息(视频序列),来预测输入图片的深度。本文提出的深度估计方法是基于视频序列的深度估计方法。 在基于视频序列的深度估计方法中,传统方法(比如ORB SLAM等)通过相邻帧的特征匹配来得到对应的特征点,通过特征点的对应关系来估计相机位姿变换,同时获得特征点的深度信息,这本身就是无监督的方法。 而自监督深度学习中,我们常通过两个网络(1)深度网络;(2)位姿网络,来同时得到相邻帧的深度和相机位姿信息,然后通过精心设计的损失函数使两个网络完成自洽并收敛。这达到了一种端到端的训练,我们只需要简单地将视频序列和一些必要的参数(比如相机内参 K )输入网络,即可完成训练。 经过上述描述,我们可以意识到,在基于视频序列的深度估计方法中上下文信息...
3D Model
2024-12-31
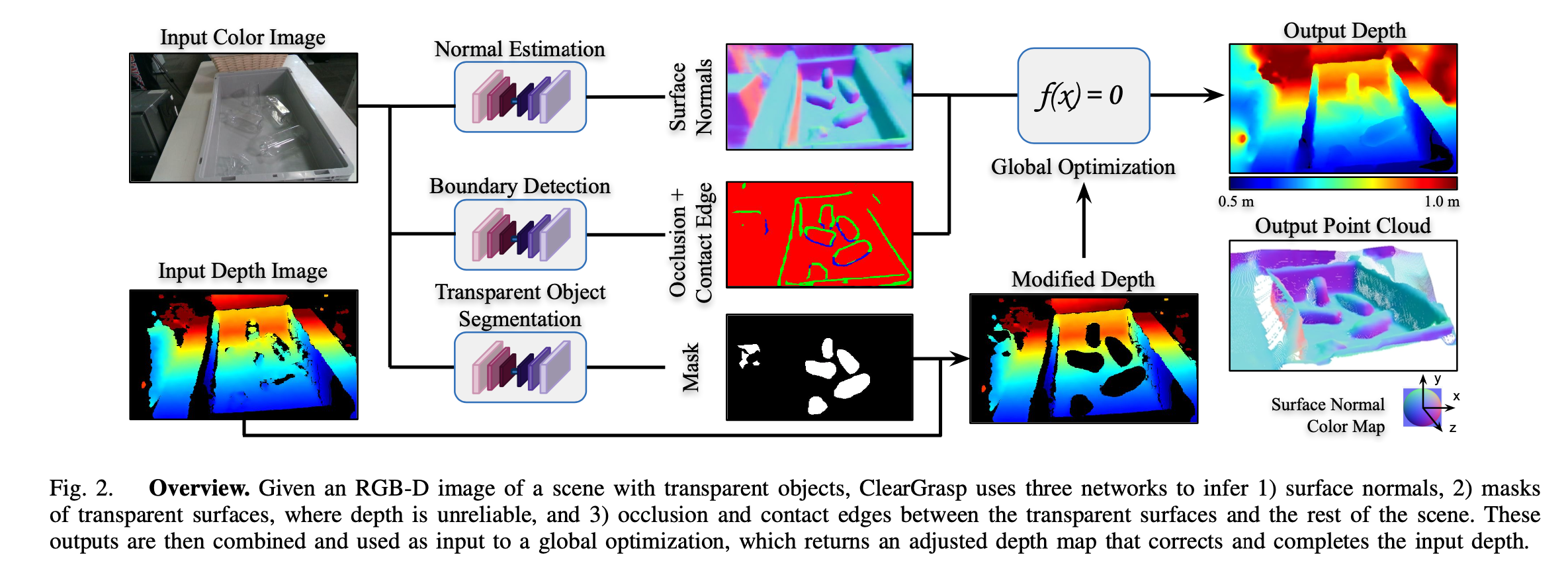
简介 对于标准的3D传感器来说,扫描透明物体一直是个难题,传统的双目,结构光或ToF RGBD镜头都对透明物体束手无策,它们难以产生准确的深度估计,通常在许多情况下,透明物体会显示为一堆无效的噪点或失真的近似平面,如下图。谷歌+Synthesis AI+哥伦比亚大学的研究团队推出了ClearGrasp技术,通过深度学习的引入增强识别和估计透明物体。 为什么3D镜头无法对透明物体呈像,原因是传统3D传感器的算法会假定所以物体的表面都符合完全漫反射(Lambertian)。即所有方向上的反光都是均匀的,然而透明物体却不符合这个假设,不仅光存在反射,还存在折射。 三个关键点 RGBD相机通常对于典型的非透明物体表面,可以提供良好的深度估计。 因此,我们推测不必要从头开始直接估算所有几何图形深度,而...
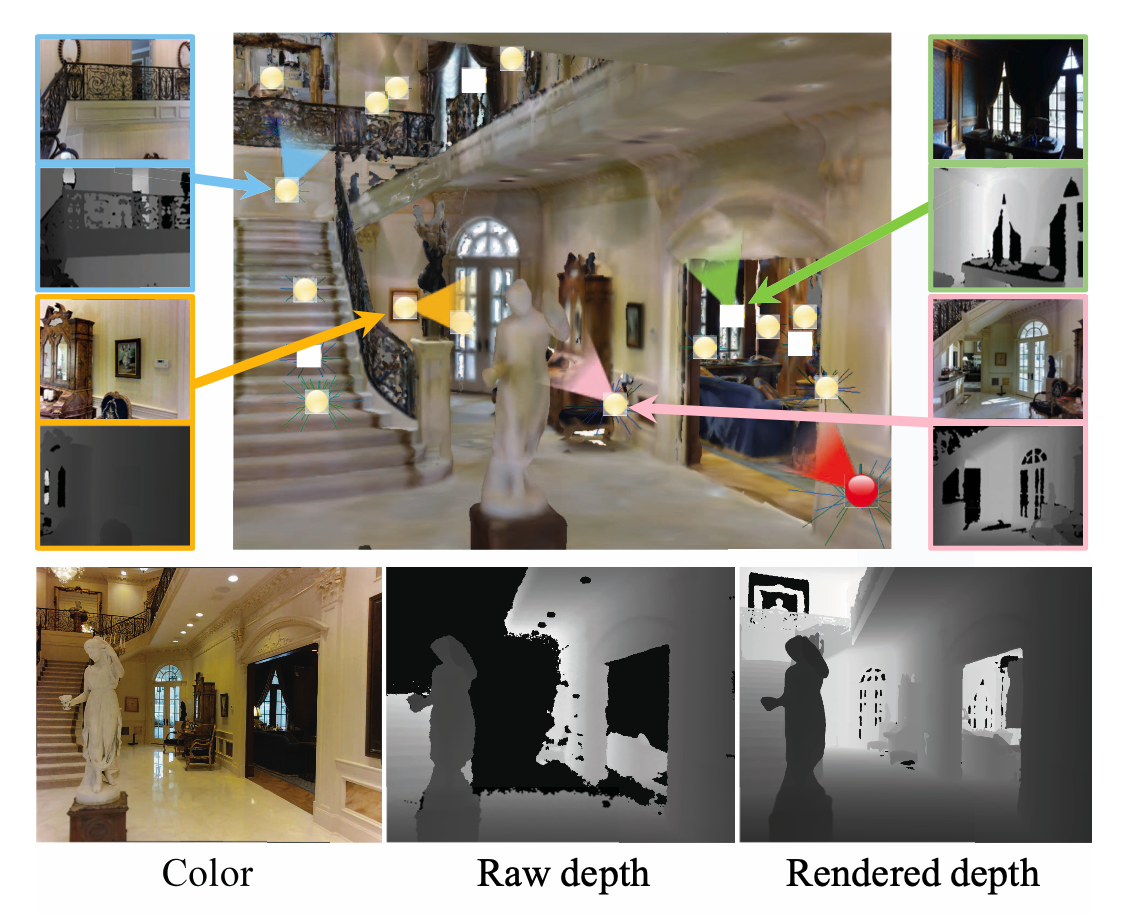
概述 虽然RGBD相机前景无限,但是受制于物理硬件的限制,目前深度相机输出的depth图还有很多问题,比如对于光滑物体表面反射、半/透明物体、深色物体、超出量程等都会造成深度图缺失。而且很多深度相机是大片的深度值缺失,这对于算法工程师来说非常头疼。 因此,深度图补全一直是一个非常有用的研究方向,之前的文献大都只能补全比较小范围的深度缺失,对于较大深度值缺失的情况无能无力,本文介绍的是2018 CVPR 最新的一项研究deep depth completion,不受RGBD相机类型的限制,只需要输入一张RGB加一张depth图,可以补全任意形式深度图的缺失。对于算法工程师来说真的是喜大普奔啊,目前主要针对的是室内环境。 数据集 本文引入新数据集,基于Matterport3D数据集重新构建完整的...
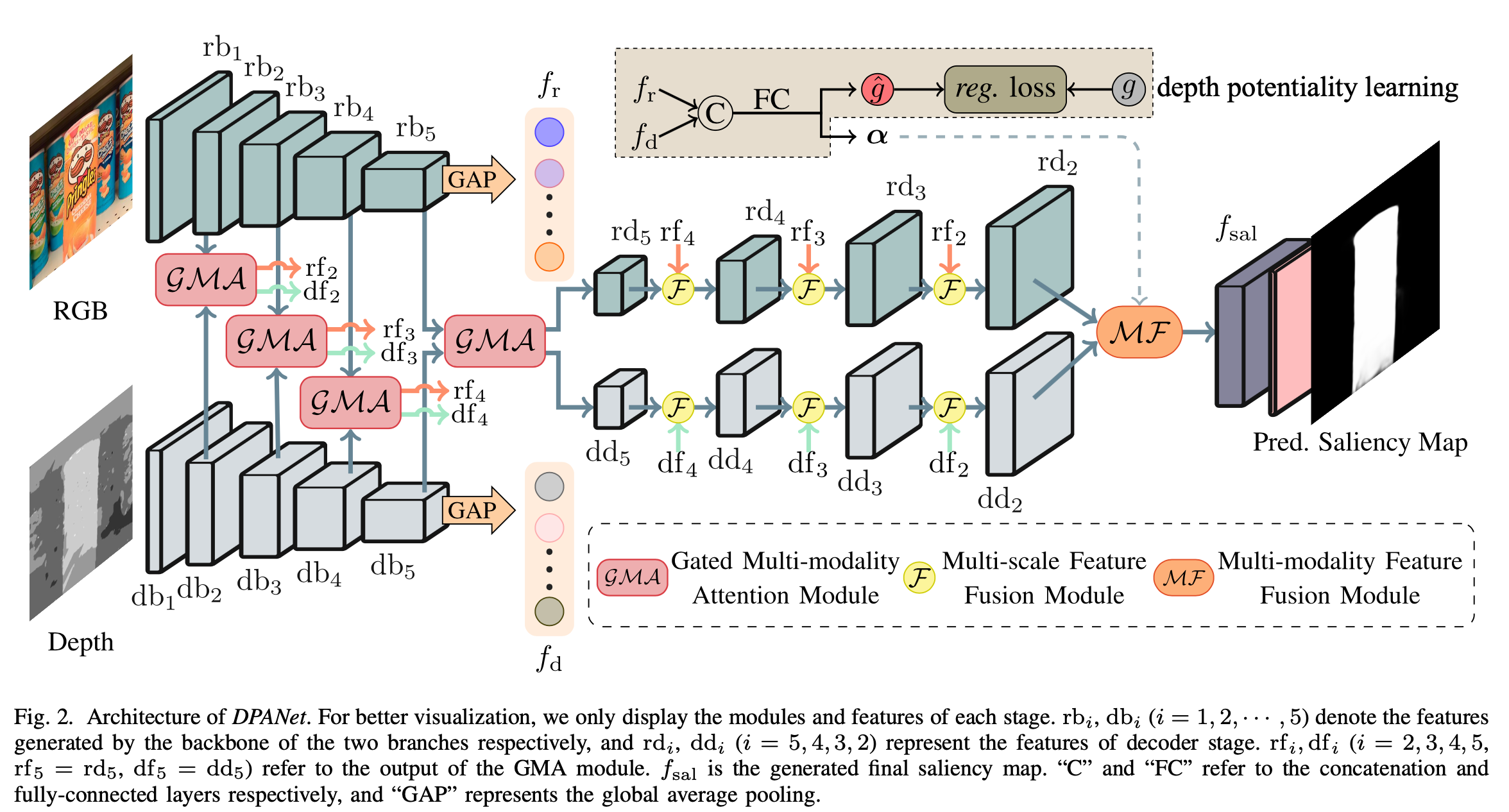
摘要 DPANet: Depth PotentialityAware Gated Attention Network for RGBD Salient Object Detection 在RGBD显著目标检测中,主要存在两个问题: 1. 如何有效地整合跨模态RGBD数据的互补性 1. 如何防止不可靠深度图的污染效应。 实际上,这两个问题是相互联系、相互交织的,但以往的方法往往只关注第一个问题,而忽略了对深度图质量的考虑,这可能导致模型陷入次优状态。在本文中,我们在一个整体模型中协同地解决这两个问题,并提出了一个新的网络DPANet来显式地建模深度图的潜力并有效地整合跨模态互补性。通过引入深度潜势感知,网络能够以学习的方式感知深度信息的潜势,指导两模态数据的融合过程,防止污染的发生。融合过程中...