基础概念
Grid-Word Example

- 环境描述:网格世界是一个直观的二维环境,包含:
- 白色格子:可通行区域。
- 橙色格子:禁止进入的区域(禁区)。
- 目标格子:代理需要到达的目标位置。
- 任务目标:
- 找到一条“好的”策略,使代理从任意初始位置到达目标格子。
- 策略应避免进入禁区、碰撞边界或走不必要的弯路。
什么是强化学习:依据策略执行动作-感知状态-得到奖励
所谓强化学习(Reinforcement Learning,简称RL),是指基于智能体在复杂、不确定的环境中最大化它能获得的奖励,从而达到自主决策的目的。
a computational approach to learning whereby an agent tries to maximize the total amount of reward it receives while interacting with a complex and uncertain environment
经典的强化学习模型可以总结为下图的形式(你可以理解为任何强化学习都包含这几个基本部分:智能体、行为、环境、状态、奖励):
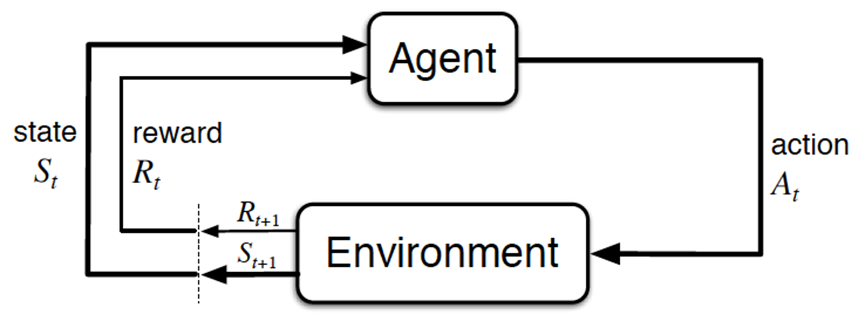
一般的文章在介绍这些概念时很容易一带而过,这里我把每个概念都逐一解释下
- Agent:一般译为智能体,就是我们要训练的模型,比如在Grid-World的小机器人就是Agent
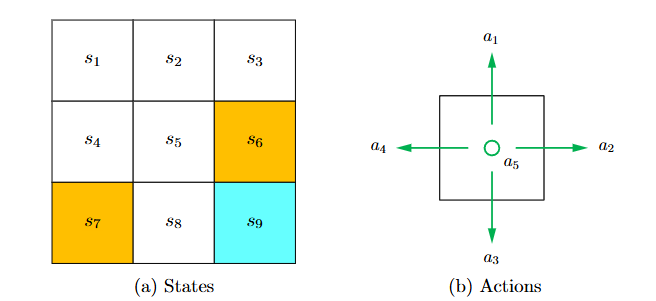
- 状态(State):状态描述了Agent 在环境中的位置。Grid-World示例:
- 网格中共有9个状态,分别为 \(s_1, s_2, ..., s_9\)。
- 状态空间(State Space):\(S = \{s_1, s_2, ..., s_9\}\)
- 动作(Action)
- 定义:动作是Agent在某一状态下可执行的行为。
- 网格世界示例:5种动作, 向上(a1)、向右(a2)、向下(a3)、向左(a4)、保持静止(a5)。
- 动作空间(Action Space):\(A = \{a_1, a_2, a_3, a_4, a_5\}\)
- 不同状态的动作空间可能不同。例如,在边界状态,某些动作(如越界)是无效的。
- 环境(Environment):是提供reward的某个对象,它可以是Grid-world中的网格,也可以是自动驾驶中的人类驾驶员,甚至可以是某些游戏AI里的游戏规则
- 奖励(reward):简记为\(r\),这个奖励可以类比为在明确目标的情况下,接近目标意味着做得好则奖励,远离目标意味着做的不好则惩,最终达到收益/奖励最大化,奖励是强化学习的核心
总的而言,Agent依据策略决策从而执行动作action,然后通过感知环境Environment从而获取环境的状态state,进而,最后得到奖励reward(以便下次再到相同状态时能采取更优的动作),然后再继续按此流程“依据策略执行动作-感知状态--得到奖励”循环进行。
状态转移
状态转移是Agent 执行某个动作后,从一个状态转移到另一个状态的过程。
状态转移可以是确定性的,也可以是随机性的。
网格世界示例
- 确定性转移:代理在状态 \(s_1\) 执行动作 \(a_2\)(向右移动),则状态转移为:
\(s_1 \xrightarrow{a_2} s_2\) - 随机性转移:如果环境中存在随机因素(如风力),代理可能偏离预期路径。例如:
在状态 \(s_1\) 执行动作 \(a_2\) 时,有一定概率被吹到 \(s_5\) .
数学描述
状态转移通过条件概率表示:
表示Agent在状态 \(s\) 执行动作 \(a\) 后转移到状态 \(s'\) 的概率。
策略(Policy)
策略是代理在每个状态下选择动作的规则,描述为条件概率:
表示代理在状态 \(s\) 下选择动作 \(a\) 的概率。
类型
- 确定性策略:
每个状态下只有一个确定的动作。例如:在状态 \(s_1\),策略为:
表示代理在 \(s_1\) 总是选择动作 \(a_2\)
- 随机性策略:
每个状态下可能选择多个动作,并为每个动作分配概率。例如: 在状态 \(s_1\),策略为:
表示代理在 \(s_1\) 以相等概率选择 \(a_2\) 或 \(a_3\)。
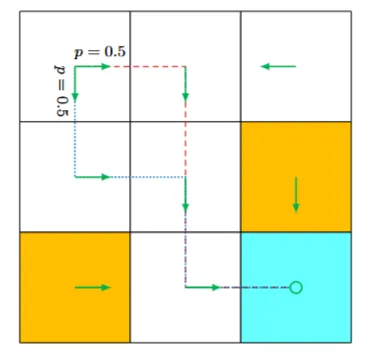
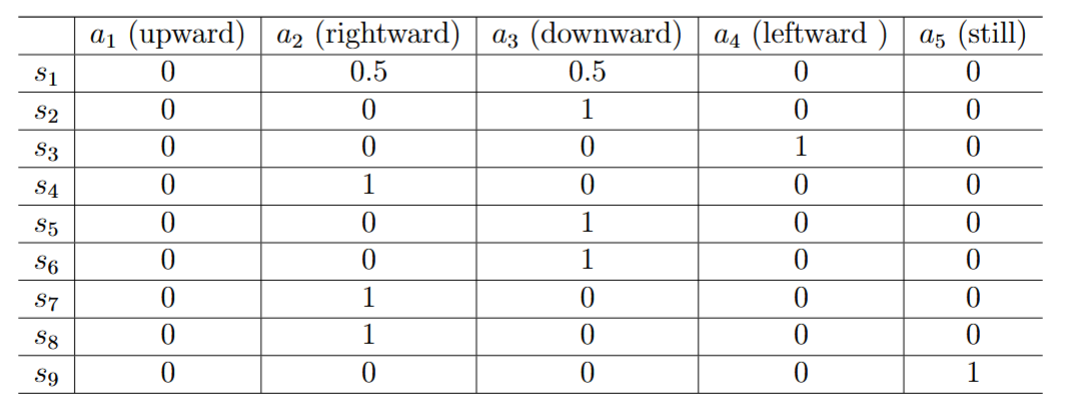
表示方法:策略可以用表格表示,每个单元格表示在某状态下选择某动作的概率, 如下表所示
奖励(Reward)
奖励是Agent执行动作后从环境获得的反馈,用于引导代理的行为。并且奖励是状态和动作的函数:\(r(s, a)\)。
网格世界示例中奖励设计如下:
- 出界:\(r_{\text{boundary}} = -1\)
- 进入禁区:\(r_{\text{forbidden}} = -1\)
- 到达目标:\(r_{\text{target}} = +1\)
- 其他情况:\(r_{\text{other}} = 0\)
奖励的重要性
- 奖励不仅影响即时决策,还决定Agent的长期策略。
- 奖励设计需谨慎,特别是复杂任务中,需要深刻理解问题。
同样, 奖励也可以表示成表格的形式:

轨迹、回报与折扣因子
轨迹(Trajectory)
轨迹是状态-动作-奖励的序列,例如:
回报(Return)
回报是轨迹中所有奖励的总和,用于评估策略优劣:
对于无限长的轨迹,引入折扣因子 \(\gamma \in (0, 1)\) 计算折扣回报:
折扣因子的作用
\(\gamma\) 越接近0,Agent越关注近期奖励;\(\gamma\) 越接近1,代理越关注长期奖励。
在具体介绍折扣因子作用前,首先介绍一下Episode的概念:
当遵循策略与环境交互时,Agent可能会在某些终止状态状态停止。由此产生的轨迹称为 episode (或者叫 trial)。
通常假设 episode 是个有限的轨迹。包含episode的任务称为 epsodic task。但是,某些任务可能没有终止状态,这意味着与环境交互的过程永远不会结束。此类任务称为 continuing tasks。
对于终止状态可以有两种处理方式:
- 第一种方法:将终止状态视为特殊状态(吸收状态)
First, if we treat the terminal state as a special state, we can specifically design its action space or state transition so that the agent stays in this state forever.
如果将终止状态(例如目标状态)设计为一个特殊状态,可以通过限制它的动作空间或状态转移规则,让代理一旦到达该状态就无法离开。
设计方式:
限制动作空间:例如,目标状态\(s_9\) 的动作空间仅允许保持静止(\(A(s_9) = \{a_5\}\)),代理只能停留在该状态。
状态转移规则:即使允许所有动作(\(A(s_9) = \{a_1, ..., a_5\}\)),所有动作都会导致代理仍然停留在 \(s_9\)(\(p(s_9|s_9, a_i) = 1\),其中 \(i = 1, ..., 5\))。
吸收状态(Absorbing State):
这种设计方式下,终止状态被称为吸收状态,表示代理一旦进入该状态就无法离开。
- 第二种方法:将终止状态视为普通状态
Second, if we treat the terminal state as a normal state, we can simply set its action space to the same as the other states, and the agent may leave the state and come back again.
如果将终止状态设计为一个普通状态,其动作空间与其他状态一致,代理可以离开该状态并重新返回。
奖励机制的影响:
每次代理到达目标状态(如 \(s_9\)),都会获得一个正奖励(\(r = 1\))。
这种设计会引导代理学习到一种策略,使其尽可能频繁地返回目标状态以获取更多奖励。
第二种方法带来一个问题:如果代理在目标状态 \(s_9\) 停留时持续获得正奖励(例如 \(r = 1\)),且轨迹是无限长的,那么总回报(Return)会趋于无穷大,因为奖励会不断累积。
解决方法:为了避免这种发散问题,需要引入折扣因子(Discount Rate,\(\gamma\))。折扣因子满足 \(0 < \gamma < 1\),用来逐步减少远期奖励的权重,使得总回报收敛到一个有限值。折扣回报公式为:
当 \(\gamma\) 较小时,Agent更关注短期奖励;当 \(\gamma\) 接近1时,Agent更关注长期奖励。
马尔可夫决策过程(MDP)
MDP(Markov decision processes)是用于描述随机动态系统的通用框架,广泛应用于强化学习。它提供了一种形式化的方法来定义状态、动作、奖励和状态转移等核心概念。
MDP的关键组成部分
集合(Sets)
MDP由以下三个基本集合构成:
- 状态空间(State Space, \(S\)):所有可能状态的集合,表示为 \(S\)
- 动作空间(Action Space, \(A(s)\)):每个状态下可执行动作的集合,表示为 \(A(s)\),其中 \(s \in S\)
- 奖励集合(Reward Set, \(R(s, a)\)):每个状态-动作对(\(s, a\))对应的奖励集合,表示为 \(R(s, a)\)
模型(Model)
MDP通过以下两个概率分布描述状态转移和奖励生成的动态过程:
- 状态转移概率(State Transition Probability):在状态 \(s\) 执行动作 \(a\) 后转移到下一状态 \(s'\) 的概率,表示为 \(p(s'|s, a)\), 其中
- 奖励概率(Reward Probability):在状态 \(s\) 执行动作 \(a\) 后获得奖励 \(r\) 的概率,表示为 \(p(r|s, a)\)
示例:在网格世界中,代理在 \(s_1\) 执行动作 \(a_1\),可能获得奖励 \(r = -1\),即 \(p(-1|s_1, a_1) = 1\)
策略(Policy)
- 定义:策略定义了代理在每个状态下选择动作的概率分布,表示为 \(\pi(a|s)\)。
- 性质:
- 示例:在网格世界中,代理在 \(s_1\) 的策略可能是:
马尔可夫性质(Markov Property)
- 定义:马尔可夫性质指的是随机过程的“无记忆性”,即下一状态或奖励仅依赖当前状态和动作,与过去的状态和动作无关。
- 数学描述:
其中,\(t\) 表示当前时间步,\(t+1\) 表示下一时间步。
- 意义:
- 马尔可夫性质确保了状态转移和奖励生成过程的简化,使得我们可以基于当前状态和动作推导未来动态。
- 它是推导MDP中贝尔曼方程的基础
MDP与MP的关系
什么是马尔可夫过程(Markov Process, MP)?
- 定义:马尔可夫过程是一个满足马尔可夫性质的随机过程。它描述了一个系统从一个状态转移到另一个状态的过程,其每一步的转移仅依赖于当前状态,而与过去的状态无关。
- 特性:
- 没有动作(Action)的概念。
- 仅包含状态转移概率 \(p(s'|s)\)。
- 常用于建模纯粹的状态变化过程。
- 离散时间马尔可夫链(Markov Chain):如果马尔可夫过程是离散时间的,且状态空间是有限或可数的,则称为马尔可夫链。在强化学习中,马尔可夫链是一个重要的基础模型。
MDP与MP的区别
- 区别:
MDP是在马尔可夫过程的基础上,增加了动作(Action)和奖励(Reward)的概念,用于描述代理与环境的交互过程。
一旦在MDP中固定了策略(Policy),MDP就退化为一个马尔可夫过程(Markov Process, MP)。 - 示例:
在网格世界中,如果我们为代理固定一个策略(如总是向右移动),那么整个系统的状态转移过程就不再依赖于动作,而仅依赖于当前状态,形成一个马尔可夫过程。
强化学习的本质
强化学习是代理通过与环境交互学习最优策略的过程:
- 感知状态:代理通过传感器感知当前状态。
- 选择动作:根据策略选择动作。
- 执行动作:动作改变状态,并获得奖励。
- 更新策略:根据奖励优化策略,形成闭环。
RL与监督学习的区别
强化学习与监督学习的区别在于:
- 监督学习有标签告诉算法什么样的输入对应着什么样的输出(譬如分类、回归等问题)所以对于监督学习,目标是找到一个最优的模型函数,使其在训练数据集上最小化一个给定的损失函数,相当于最小化预测误差最优模型 = arg minE { [损失函数(标签,模型(特征)] }
RL没有标签告诉它在某种情况下应该做出什么样的行为,只有一个做出一系列行为后最终反馈回来的reward,然后判断当前选择的行为是好是坏相当于RL的目标是最大化智能体策略在和动态环境交互过程中的价值,而策略的价值可以等价转换成奖励函数的期望,即最大化累计下来的奖励期望最优策略 = arg maxE { [奖励函数(状态,动作)] } - 监督学习如果做了比较坏的选择则会立刻反馈给算法RL的结果反馈有延时,有时候可能需要走了很多步以后才知道之前某步的选择是好还是坏
- 监督学习中输入是独立分布的,即各项数据之间没有关联RL面对的输入总是在变化,每当算法做出一个行为,它就影响了下一次决策的输入