原理分析
网络架构:
本文的任务是Object detection,用到的工具是Transformers,特点是End-to-end。
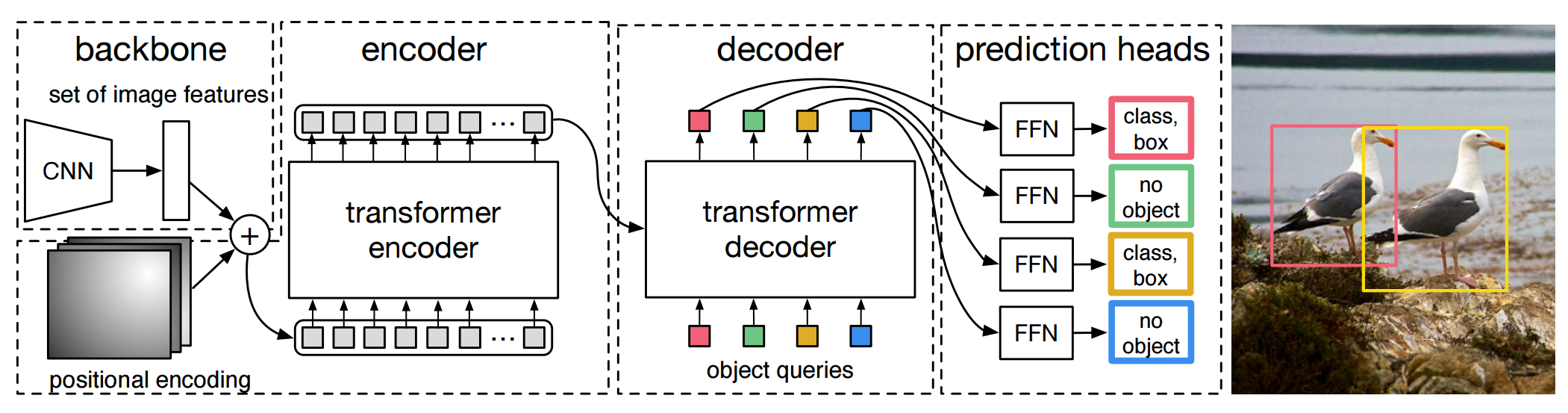
目标检测的任务是要去预测一系列的Bounding Box的坐标以及Label, 现代大多数检测器通过定义一些proposal,anchor或者windows,把问题构建成为一个分类和回归问题来间接地完成这个任务。文章所做的工作,就是将transformers运用到了object detection领域,取代了现在的模型需要手工设计的工作,并且取得了不错的结果。在object detection上DETR准确率和运行时间上和Faster RCNN相当;将模型 generalize 到 panoptic segmentation 任务上,DETR表现甚至还超过了其他的baseline。DETR第一个使用End to End的方式解决检测问题,解决的方法是把检测问题视作是一个set prediction problem,如下图所示。

网络的主要组成是CNN和Transformer,Transformer借助self-attention机制,可以显式地对一个序列中的所有elements两两之间的interactions进行建模,使得这类transformer的结构非常适合带约束的set prediction的问题。DETR的特点是:一次预测,端到端训练,set loss function和二分匹配。
文章的主要有两个关键的部分。
- 第一个是用transformer的encoder-decoder架构一次性生成 \(N\) 个box prediction。其中 \(N\) 是一个事先设定的、比远远大于image中object个数的一个整数, 文章中设定\(N=100\)。
- 第二个是设计了bipartite matching loss,基于预测的boxex和ground truth boxes的二分图匹配计算loss的大小,从而使得预测的box的位置和类别更接近于ground truth。
DETR整体结构可以分为四个部分:backbone,encoder,decoder和FFN,如下图所示,以下分别解释这四个部分:
backbone
CNN backbone处理 \(x_{img}∈B×3×H_0×W_0\) 维的图像,把它转换为\(f\in R^{B\times C\times H\times W}\) 维的feature map(一般来说 或\(C=2048\)或256,\(H=\frac{H_0}{32},W=\frac{W_0}{32}\)),backbone只做这一件事。
encoder
encoder的输入是\(f\in R^{B\times C\times H\times W}\)维的feature map,接下来依次进行以下过程:
位置编码
进行完位置编码以后根据paper中的图片会有个相加的过程,如下图问号处所示。很多读者有疑问的地方是:论文图中相加的2个张量,一个是input embedding,另一个是位置编码维度看上去不一致,是怎么相加的?后面会解答。

原版Transformer和Vision Transformer的Positional Encoding的表达式为:
式中, \(d\) 就是这个 \(d\times HW\) 维的feature map的第一维, \(pos\in [1,HW]\)。表示token在sequence中的位置,sequence的长度是 \(HW\) ,例如第一个token 的 \(pos=0\) 。
\(i\),或者准确意义上是 \(2i\) 和 \(2i+1\) 表示了Positional Encoding的维度,\(i\) 的取值范围是: \(\left[ 0,\ldots ,{{{d}}}/{2}\; \right)\)。所以当 \(pos\) 为1时,对应的Positional Encoding可以写成:
式中, \(d=256\)。
- 第一点不同的是,原版Transformer只考虑 \(x\) 方向的位置编码,但是DETR考虑了 \(xy\) 方向的位置编码,因为图像特征是2-D特征。采用的依然是 sin cos 模式,但是需要考虑 \(xy\) 两个方向。不是类似vision transoformer做法简单的将其拉伸为 \(d\times HW\) ,然后从\([1, HW]\) 进行长度为256的位置编码,而是考虑了 \(xy\) 方向同时编码,每个方向各编码128维向量,这种编码方式更符合图像特点。
- 另一点不同的是,原版Transformer只在Encoder之前使用了Positional Encoding,而且是在输入上进行Positional Encoding,再把输入经过transformation matrix变为Query,Key和Value这几个张量。但是DETR在Encoder的每一个Multi-head Self-attention之前都使用了Positional Encoding,且只对Query和Key使用了Positional Encoding,即:只把维度为\((HW,B,256)\) 维的位置编码与维度为\((HW,B,256)\) 维的Query和Key相加,而不与Value相加。
如下图所示为DETR的Transformer的详细结构和原版Transformer的结构
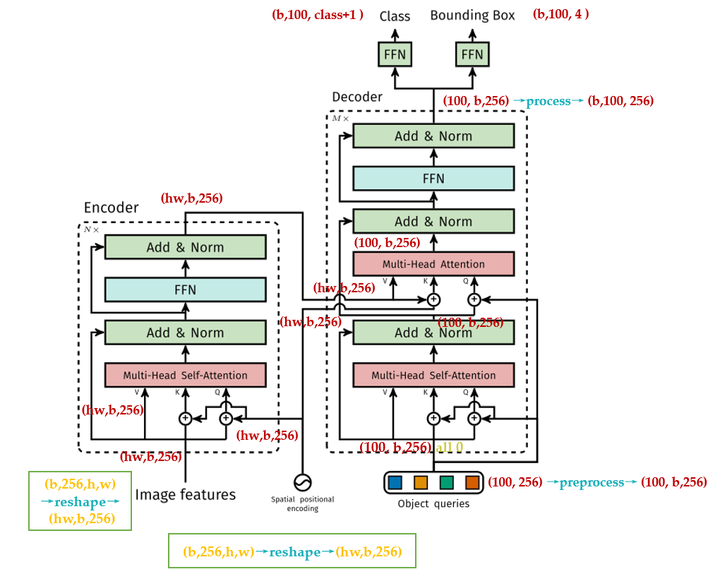

可以发现,除了Positional Encoding设置的不一样外,Encoder其他的结构是一致的。每个Encoder Layer包含一个multi-head self-attention 的module和一个前馈网络Feed Forward Network。
Encoder最终输出的是\((H\cdot W,b,256)\)维的编码矩阵Embedding,按照原版Transformer的做法,把这个东西给Decoder。
总结下和原始transformer编码器不同的地方:
- 输入编码器的位置编码需要考虑2-D空间位置。
- 位置编码向量需要加入到每个Encoder Layer中。
- 在编码器内部位置编码Positional Encoding仅仅作用于Query和Key,即只与Query和Key相加,Value不做任何处理。
Decoder
DETR的Decoder和原版Transformer的decoder是不太一样的,如上面两图对比所示。
先回忆下原版Transformer,decoder的最后一个框:output probability,代表一次只产生一个单词的softmax,根据这个softmax得到这个单词的预测结果。这个过程我们表达为:predicts the output sequence one element at a time。
不同的是,DETR的Transformer Decoder是一次性处理全部的object queries,即一次性输出全部的predictions;而不像原始的Transformer是auto-regressive的,从左到右一个词一个词地输出。这个过程我们表达为:decodes the N objects in parallel at each decoder layer。
DETR的Decoder主要有两个输入:
- Transformer Encoder输出的Embedding与 position encoding 之和。
- Object queries。
其中,Embedding就是上文提到的\((H\cdot W,b,256)\) 的编码矩阵。这里着重讲一下Object queries。
Object queries是一个维度为 \((100,b,256)\) 维的张量,数值类型是nn.Embedding,说明这个张量是可以学习的,即:我们的Object queries是可学习的。Object queries矩阵内部通过学习建模了100个物体之间的全局关系,例如房间里面的桌子旁边(A类)一般是放椅子(B类),而不会是放一头大象(C类),那么在推理时候就可以利用该全局注意力更好的进行解码预测输出。
Decoder的输入一开始也初始化成维度为 $(100,b,256) $维的全部元素都为0的张量,和Object queries加在一起之后充当第1个multi-head self-attention的Query和Key。第一个multi-head self-attention的Value为Decoder的输入,也就是全0的张量。
到了每个Decoder的第2个multi-head self-attention,它的Key和Value来自Encoder的输出张量,维度为 \((hw,b,256)\),其中Key值还进行位置编码。Query值一部分来自第1个Add and Norm的输出,维度为 \((100,b,256)\) 的张量,另一部分来自Object queries,充当可学习的位置编码。所以,第2个multi-head self-attention的Key和Value的维度为\((hw,b,256)\) ,而Query的维度为\((100,b,256)\)。
每个Decoder的输出维度为 \((1,b,100,256)\) ,送入后面的前馈网络。
到这里你会发现:Object queries充当的其实是位置编码的作用,只不过它是可以学习的位置编码,所以,我们对Encoder和Decoder的每个self-attention的Query和Key的位置编码做个归纳,如下图所示,Value没有位置编码:

损失函数
得到了Decoder的输出以后,如前文所述,应该是输出维度为\((b,100,256)\)的张量。接下来要送入2个前馈网络FFN得到class和Bounding Box。它们会得到 \(N=100\) 个预测目标,包含类别和Bounding Box,当然这个100肯定是大于图中的目标总数的。如果不够100,则采用背景填充,计算loss时候回归分支分支仅仅计算有物体位置,背景集合忽略。所以,DETR输出张量的维度为输出的张量的维度是\((b,100,\color{crimson}{\text{class}+1})\)和\((b,100,\color{purple}{4})\)。对应COCO数据集来说, class+1=92 , 4 指的是每个预测目标归一化的\((c_x,c_y,w,h)\)。归一化就是除以图片宽高进行归一化。
到这里我们了解了DETR的网络架构,我们发现,它输出的张量的维度是 分类分支:\((b,100,\color{crimson}{\text{class}+1})\) 和回归分支:\((b,100,\color{purple}{4})\),其中,前者是指100个预测框的类型,后者是指100个预测框的Bounding Box,但是读者可能会有疑问:预测框和真值是怎么一一对应的?换句话说:你怎么知道第47个预测框对应图片里的狗,第88个预测框对应图片里的车?等等。
我们下面就来聊聊这个问题。
set prediction
相比Faster R-CNN等做法,DETR最大特点是将目标检测问题转化为无序集合预测问题(set prediction)。论文中特意指出Faster R-CNN这种设置一大堆anchor,然后基于anchor进行分类和回归其实属于代理做法即不是最直接做法,目标检测任务就是输出无序集合,而Faster R-CNN等算法通过各种操作,并结合复杂后处理最终才得到无序集合属于绕路了,而DETR就比较纯粹了。现在核心问题来了:输出的 \((b,100)\)个检测结果是无序的,如何和 GT Bounding Box 计算loss?这就需要用到经典的双边匹配算法了,也就是常说的匈牙利算法,该算法广泛应用于最优分配问题。
一幅图片,我们把第 \(i\) 个物体的真值表达为 \(y_i=(c_i,b_i)\),其中, \(c_i\) 表示它的 class , \(b_i\) 表示它的 Bounding Box 。我们定义 \(\hat y = \{\hat y_i\}_{i=1}^{N}\) 为网络输出的 \(N\) 个预测值。
假设我们已经了解了什么是匈牙利算法(先假装了解了),对于第 \(i\) 个 GT ,\(\sigma(i)\) 为匈牙利算法得到的与\(GT_i\) 对应的prediction的索引。我举个栗子,比如 \(i=3,\sigma(i)=18\) ,意思就是:与第3个真值对应的预测值是第18个。
那我能根据 匈牙利算法 ,找到 与每个真值对应的预测值是哪个,那究竟是如何找到呢?
我们看看这个表达式是甚么意思,对于某一个真值 \(y_i\) ,假设我们已经找到这个真值对应的预测值 \(\hat y_{\sigma(i)}\) ,这里的$ Σ_N$ 是所有可能的排列,代表从真值索引到预测值索引的所有的映射,然后用 \(L_{match}\) 最小化 \(y_i\) 和 \(\hat y_{\sigma(i)}\) 的距离。这个 \(L_{match}\) 具体是:
意思是:假设当前从真值索引到预测值索引的所有的映射为 \(\sigma\) ,对于图片中的每个真值 \(i\) ,先找到对应的预测值 \(\sigma(i)\) ,再看看分类网络的结果 $\hat p_{\sigma(i)}(c_i) $ ,取反作为 \(L_{match}\) 的第1部分。再计算回归网络的结果 \(\hat b_{\sigma(i)}\) 与真值的 Bounding Box 的差异,即 \(L_{box}({b_{i}, \hat b_{\sigma(i)}})\) ,作为 \(L_{match}\) 的第2部分。
所以,可以使得 \(L_{match}\) 最小的排列 \(\hat\sigma\) 就是我们要找的排列,即:对于图片中的每个真值 \(i\) 来讲, \(\hat\sigma(i)\) 就是这个真值所对应的预测值的索引。
请读者细品这个 寻找匹配的过程 ,这就是匈牙利算法的过程。是不是与Anchor或Proposal有异曲同工的地方,只是此时我们找的是一对一匹配。
接下来就是使用上一步得到的排列 \(\hat\sigma\) ,计算匈牙利损失:
式中的\(L_{box}\) 具体为:
最常用的 \(L_1 \;loss\) 对于大小 Bounding Box 会有不同的标度,即使它们的相对误差是相似的。为了缓解这个问题,作者使用了 \(L_1 \;loss\) 和广义IoU损耗 \(L_{iou}\) 的线性组合,它是比例不变的。
Hungarian意思就是匈牙利,也就是前面的 \(L_{match}\),上述意思是需要计算 \(M\) 个 GTBounding Box 和 \(N\) 个输预测出集合两两之间的广义距离,距离越近表示越可能是最优匹配关系,也就是两者最密切。广义距离的计算考虑了分类分支和回归分支。
最后,再概括一下DETR的End-to-End的原理,前面那么多段话就是为了讲明白这个事情,如果你对前面的论述还存在疑问的话,把下面一直到Experiments之前的这段话看懂就能解决你的困惑。
DETR是怎么训练的?
训练集里面的任何一张图片,假设第1张图片,我们通过模型产生100个预测框 PredictBounding Box ,假设这张图片有只3个 GTBounding Box ,它们分别是 \(\color{orange}{\text{Car}},\color{green}{\text{Dog}},\color{darkturquoise}{\text{Horse}}\) 。
问题是:我怎么知道这100个预测框哪个是对应 Car ,哪个是对应 Dog ,哪个是对应 Horse ?
我们建立一个 (100,3) 的矩阵,矩阵里面的元素就是 (4) 式的计算结果,举个例子:比如左上角的 (1,1) 号元素的含义是:第1个预测框对应 \(\color{orange}{\text{Car}}(\text{label}=3)\) 的情况下的 \(L_{match}\) 值。我们用**scipy.optimize** 这个库中的 **linear_sum_assignment **函数找到最优的匹配,这个过程我们称之为:"匈牙利算法 (Hungarian Algorithm)"。
假设**linear_sum_assignment**做完以后的结果是:第 23 个预测框对应 Car ,第 44 个预测框对应 Dog ,第 95 个预测框对应 Horse 。
现在把第 23,44,95 个预测框挑出来,按照 (5) 式计算Loss,得到这个图片的Loss。
把所有的图片按照这个模式去训练模型。
训练完以后怎么用?
训练完以后,你的模型学习到了一种能力,即:模型产生的100个预测框,它知道某个预测框该对应什么 Object ,比如,模型学习到:第1个 PredictBounding Box 对应 Car(label=3) ,第2个 PredictBounding Box 对应 Bus(label=16) ,第3个 PredictBounding Box 对应 Sky(label=21) ,第4个 PredictBounding Box 对应 Dog(label=24) ,第5个 PredictBounding Box 对应 Horse(label=75) ,第6-100个 PredictBounding Box 对应 ∅(label=92) ,等等。
以上只是我举的一个例子,意思是说:模型知道了自己的100个预测框每个该做什么事情,即:每个框该预测什么样的 Object 。
为什么训练完以后,模型学习到了一种能力,即:模型产生的100个预测框,它知道某个预测框该对应什么 Object ?
还记得前面说的Object queries吗?它是一个维度为\((100,b,256)\) 维的张量,初始时元素全为 0 。实现方式是nn.Embedding(num_queries, hidden_dim),这里num_queries=100,hidden_dim=256,它是可训练的。这里的 \(b\) 指的是batch size,我们考虑单张图片,所以假设Object queries是一个维度为 (100,256) 维的张量。我们训练完模型以后,这个张量已经训练完了,那此时的Object queries究竟代表什么?
我们把此时的Object queries看成100个格子,每个格子是个256维的向量。训练完以后,这100个格子里面注入了不同 Object 的位置信息和类别信息。比如第1个格子里面的这个256维的向量代表着 Car 这种 Object 的位置信息,这种信息是通过训练,考虑了所有图片的某个位置附近的 Car 编码特征,属于和位置有关的全局 Car 统计信息。
测试时,假设图片中有 Car,Dog,Horse 三种物体,该图片会输入到编码器中进行特征编码,假设特征没有丢失,Decoder的Key和Value就是编码器输出的编码向量,而Query就是Object queries,就是我们的100个格子。
Query可以视作代表不同 Object 的信息,而Key和Value可以视作代表图像的全局信息。
现在通过注意力模块将Query和Key计算,然后加权Value得到解码器输出。对于第1个格子的Query会和Key中的所有向量进行计算,目的是查找某个位置附近有没有 Car ,如果有那么该特征就会加权输出,对于第3个格子的Query会和Key中的所有向量进行计算,目的是查找某个位置附近有没有 Sky ,很遗憾,这个没有,所以输出的信息里面没有 Sky 。
整个过程计算完成后就可以把编码向量中的 Car,Dog,Horse 的编码嵌入信息提取出来,然后后面接 \(FFN\) 进行分类和回归就比较容易,因为特征已经对齐了。
发现了吗?Object queries在训练过程中对于 \(N\) 个格子会压缩入对应的和位置和类别相关的统计信息,在测试阶段就可以利用该Query去和某个图像的编码特征Key,Value计算,若图片中刚好有Query想找的特征,比如 Car ,则这个特征就能提取出来,最后通过2个 FFN 进行分类和回归。所以前面才会说Object queries作用非常类似Faster R-CNN中的anchor,这个anchor是可学习的,由于维度比较高,故可以表征的东西丰富,当然维度越高,训练时长就会越长。
这就是DETR的End-to-End的原理,可以简单归结为上面的几段话,你读懂了上面的话,也就明白了DETR以及End-to-End的Detection模型原理。
伪代码
下面是论文中给出的简化代码,可以直接跑,只是精度会差两个点。
import torch
from torch import nn
from torchvision.models import resnet50
class DETR(nn.Module):
def __init__(self, num_classes, hidden_dim, nheads,
num_encoder_layers, num_decoder_layers):
super().__init__()
# We take only convolutional layers from ResNet-50 model
self.backbone = nn.Sequential(*list(resnet50(pretrained=True).children())[:-2])
self.conv = nn.Conv2d(2048, hidden_dim, 1) # 1×1卷积层将2048维特征降到256维
self.transformer = nn.Transformer(hidden_dim, nheads, num_encoder_layers, num_decoder_layers)
self.linear_class = nn.Linear(hidden_dim, num_classes + 1) # 类别FFN
self.linear_bbox = nn.Linear(hidden_dim, 4) # 回归FFN
self.query_pos = nn.Parameter(torch.rand(100, hidden_dim)) # object query
# 下面两个是位置编码
self.row_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
self.col_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
def forward(self, inputs):
x = self.backbone(inputs)
h = self.conv(x)
H, W = h.shape[-2:]
pos = torch.cat([self.col_embed[:W].unsqueeze(0).repeat(H, 1, 1),
self.row_embed[:H].unsqueeze(1).repeat(1, W, 1),
], dim=-1).flatten(0, 1).unsqueeze(1) # 位置编码
h = self.transformer(pos + h.flatten(2).permute(2, 0, 1),self.query_pos.unsqueeze(1))
return self.linear_class(h), self.linear_bbox(h).sigmoid()
detr = DETR(num_classes=91, hidden_dim=256, nheads=8, num_encoder_layers=6, num_decoder_layers=6)
detr.eval()
inputs = torch.randn(1, 3, 800, 1200)
logits, bboxes = detr(inputs)
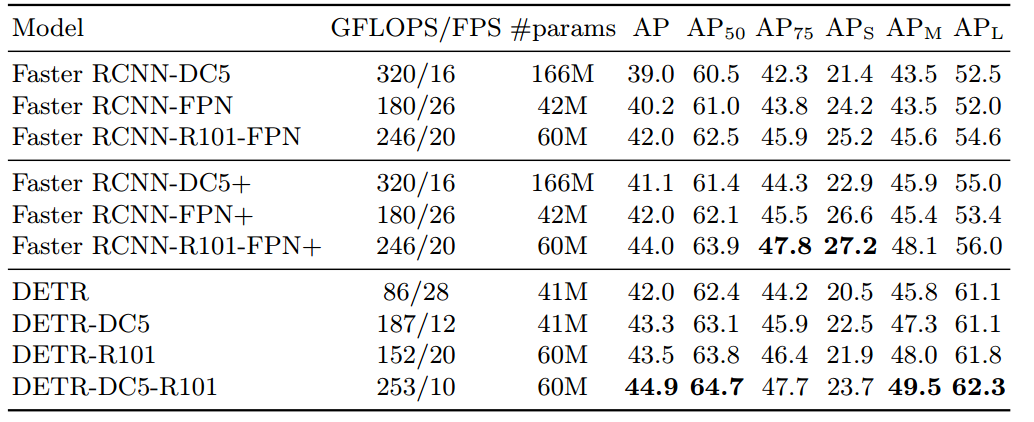
Experiments
1. 性能对比: