背景 RLHF 通常包括三个阶段: 有监督微调(SFT) 奖励建模阶段 (Reward Model) RL微调阶段 直接偏好优化(DPO) 传统的RLHF方法分两步走: 1. 先训练一个奖励模型来判断哪个回答更好 1. 然后用强化学习让语言模型去最大化这个奖励 这个过程很复杂,就像绕了一大圈:先学习"什么是好的",再学习"如何做好"。 DPO发现了一个数学上的捷径: 1. 关键发现:对于任何奖励函数,都存在一个对应的最优策略(语言模型);反过来说,任何语言模型也隐含着一个它认为最优的奖励函数 1. 直接优化:与其先训练奖励模型再训练语言模型,不如直接训练语言模型,让它自己内化"什么是好的" 1. 数学转换:DPO将"学习判断好坏"和"学习生成好内容"这两个任务合二为一,通过一个简单的数学变换...
Reinforcement Learning
2025-03-08

引言 DDPG同样使用了ActorCritic的结构,Deterministic的确定性策略是和随机策略相对而言的,对于某一些动作集合来说,它可能是连续值,或者非常高维的离散值,这样动作的空间维度极大。如果我们使用随机策略,即像DQN一样研究它所有的可能动作的概率,并计算各个可能的动作的价值的话,那需要的样本量是非常大才可行的。于是有人就想出使用确定性策略来简化这个问题。 作为随机策略,在相同的策略,在同一个状态 s 处,采用的动作 [Math] 是基于一个概率分布的,即是不确定的。而确定性策略则决定简单点,虽然在同一个状态处,采用的动作概率不同,但是最大概率只有一个,如果我们只取最大概率的动作,去掉这个概率分布,那么就简单多了。即作为确定性策略,相同的策略,在同一个状态处,动作是唯一确定的...
Reinforcement Learning
2025-03-03

引言与背景 蒙特卡洛方法是强化学习中的重要算法类别,它标志着从基于模型到无模型算法的转变。这类算法不依赖环境模型,而是通过与环境的直接交互获取经验数据来学习最优策略。 蒙特卡洛方法在强化学习算法谱系中处于"无模型"方法的起始位置,是从基于模型的方法(如值迭代和策略迭代)向无模型方法过渡的第一步。 无模型强化学习的核心理念可以简述为:如果没有模型,我们必须有数据;如果没有数据,我们必须有模型;如果两者都没有,我们就无法找到最优策略。在强化学习中,"数据"通常指智能体与环境交互的经验。 均值估计问题 在介绍蒙特卡洛强化学习算法之前,我们首先需要理解均值估计问题,这是理解从数据而非模型中学习的基础。 考虑一个可以取有限实数集合 X 中值的随机变量 X ,我们的任务是计算 X 的均值或期望值: E[...
Reinforcement Learning
2025-03-02
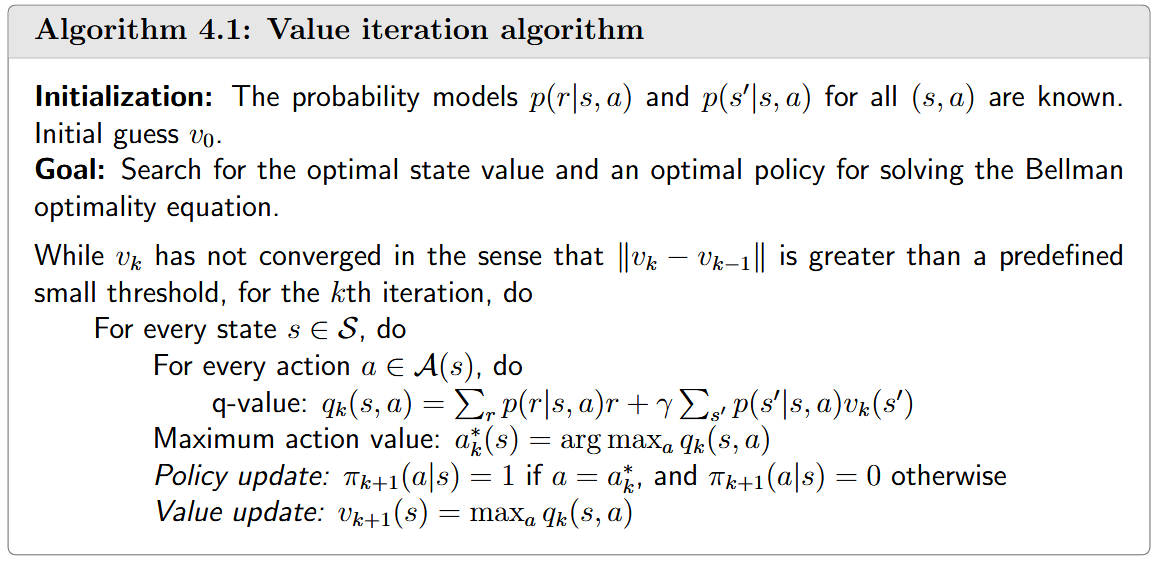
引言 强化学习中,找到最优策略是核心目标。本文详细介绍三种能够找到最优策略的基础算法:价值迭代、策略迭代和截断策略迭代。这些算法属于动态规划范畴,需要系统模型,是后续无模型强化学习算法的重要基础。 在强化学习的发展路线中,这些算法处于"基础工具"到"算法/方法"的过渡阶段,是从"有模型"到"无模型"学习的重要桥梁。 价值迭代(Value iteration) 价值迭代算法基于收缩映射定理求解贝尔曼最优方程。其核心迭代公式为: [公式] 根据收缩映射定理,当 [Math] 时, v_k 和 [Math] 分别收敛到最优状态值和最优策略。 每次迭代包含两个步骤: 1. 策略更新步骤 (policy update step):找到能解决以下优化问题的策略 1. 价值更新步骤(value updat...