前言
首先看论文题目。Swin Transformer: Hierarchical Vision Transformer using Shifted Windows。即:Swin Transformer是一个用了移动窗口的层级式Vision Transformer
所以Swin来自于 Shifted Windows , 它能够使Vision Transformer像卷积神经网络一样,做层级式的特征提取,这样提取出来的特征具有多尺度的概念 ,这也是 Swin Transformer这篇论文的主要贡献。
标准的Transformer直接用到视觉领域有一些挑战,即:
- 多尺度问题:比如一张图片里的各种物体尺度不统一,NLP中没有这个问题;
- 分辨率太大:如果将图片的每一个像素值当作一个token直接输入Transformer,计算量太大,不利于在多种机器视觉任务中的应用。
基于这两点,本文提出了 hierarchical Transformer,通过移动窗口来学习特征。
- 移动窗口学习,即只在滑动窗口内部计算自注意力,所以称为W-MSA(Window Multi-Self-Attention)。
- W-MSA大大降低了降低了计算复杂度。同时通过Shiting(移动)的操作可以使相邻的两个窗口之间进行交互,也因此上下层之间有了cross-window connection,从而变相达到了全局建模的能力。
- 分层结构使得模型能够灵活处理不同尺度的图片,并且计算复杂度与图像大小呈线性关系,这样模型就可以处理更大分辨率的图片(为作者后面提出的Swin V2铺平了道路)。
Swin-Transformer 对比 VIT
Vision Transformer:进行MSA(多头注意力)计算时,任何一个patch都要与其他所有的patch都进行attention计算,计算量与图片的大小成平方增长。
Swin Transformer:采用了W-MSA,只对window内部计算MSA,当图片大小增大时,计算量仅仅是呈线性增加。
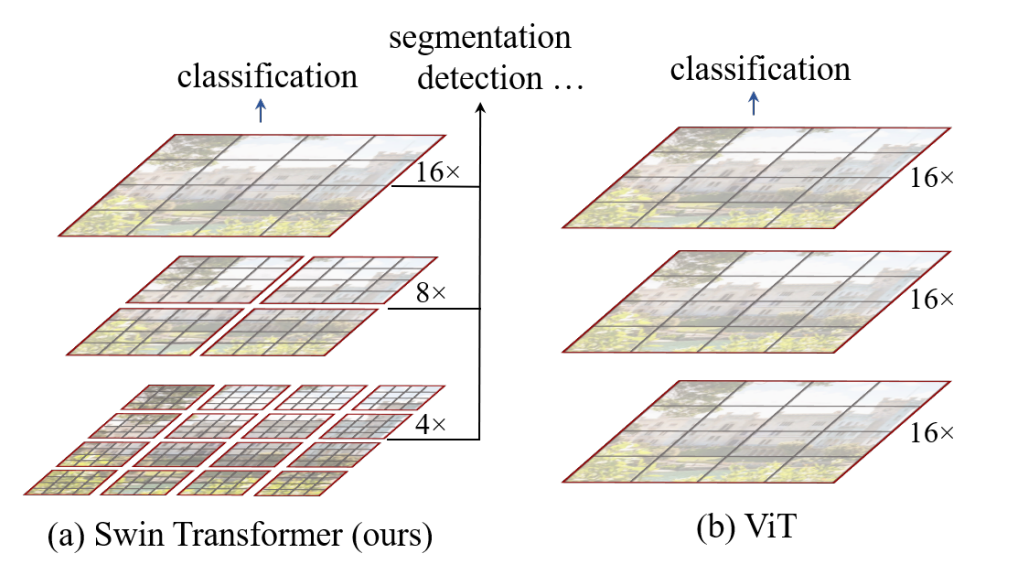
可以看出主要区别有两个:
- 层次化构建方法(Hierarchical feature maps) :Swin Transformer使用了类似卷积神经网络中的层次化构建方法。
- 使用W-MSA ,好处有两点:
方法部分
模型结构
原论文中给出的关于Swin Transformer(Swin-T)网络的架构图如下:
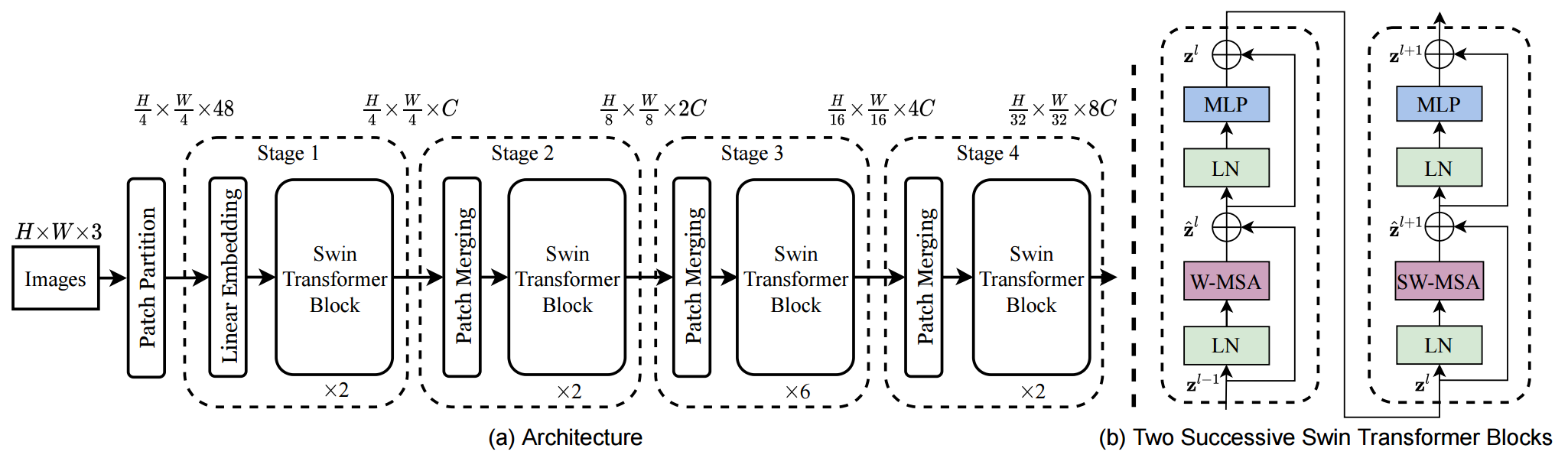
前向过程:
- Patch Partition层:类似ViT一样将图片分割成一个个4*4大小的patch([224,224,3]—>[56,56,48])
- Linear Embeding层:将每个像素的channel数调整为C,并对每个channel做一次Layer Norm。([56,56,48]—>[56,56,96])
- 将每49个patch划分为一个窗口,后续只在窗口内进行计算。
- 通过四个Stage构建不同大小的特征图。其中后三个stage都是先通过一个Patch Merging层进行2倍的下采样。([56,56,96]—>[28,28,192]—>[14,14,384]—>[7,7,768])
- 每个stage中,重复堆叠Swin Transformer Block偶数次(结构见上图右侧,分别使用W-MSA和SW-MSA,两个结构成对出现)。
- 如果是分类任务,后面还会接上一个Layer Norm层、全局池化层以及全连接层得到最终输出。[7,7,768]—>[1,768]—>[1,num_class](也就是做序列的全局平均,类似CNN的做法,而不是加上CLS做分类)
看完整个前向过程之后,就会发现 Swin Transformer 有四个 stage,还有类似于池化的 patch merging 操作,自注意力还是在小窗口之内做的,以及最后还用的是全局平均池化 。所以可以说 Swin Transformer是披着Transformer皮的卷积神经网络,将二者进行了完美的结合。
接下来,在分别对Patch Merging、W-MSA、SW-MSA以及使用到的相对位置偏置(relative position bias)进行详解。
图片预处理:分块和降维 (Patch Partition)
Swin Transformer 首先把 的图片,变成一个 的2维的image patches。它可以看做是一系列的展平的2D块的序列,这个序列中一共有 个展平的2D块,每个块的维度是 。其中 是块大小。
在 Swin Transformer 中,块的大小 ,所以得到的 ,这里的 。
所以经过了这一步的分块操作,一张 的图片就变成了 的张量,可以理解成是 个图片块,每个块是一个 48 维的 token。
线性变换 (Linear Embedding)
现在得到的向量维度是: ,还需要做一步叫做Linear Embedding的步骤,对每个向量都做一个线性变换(即全连接层),变换后的维度为 ,这里我们称其为 Linear Embedding。这一步之后得到的张量维度是: 。
Stage1: Swin Transformer Block
接下来 这个张量进入2个连续的 Swin Transformer Block 中,这被称作 Stage 1,在整个的 Stage 1 里面 token 的数量一直维持 不变。
Swin Transformer Block 具体是如何操作的呢?
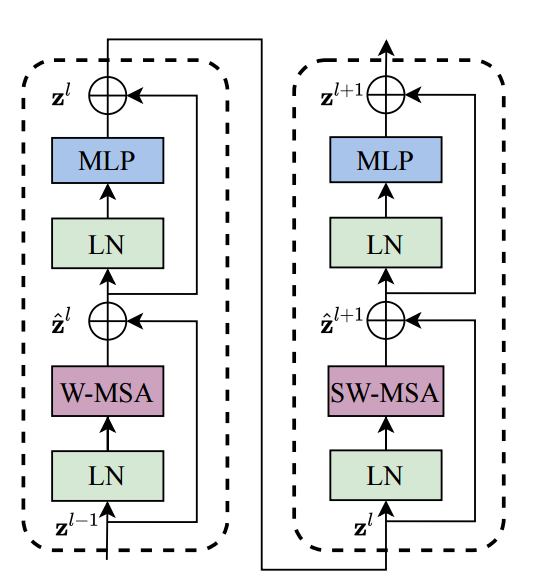
Swin Transformer Block 的结构如上图所示。上图是2个连续的 Swin Transformer Block。其中一个 Swin Transformer Block 由一个带两层 MLP 的 Shifted Window-based MSA 组成,另一个 Swin Transformer Block 由一个带两层 MLP 的 **Window-based MSA **组成。在每个 MSA 模块和每个 MLP 之前使用 LayerNorm(LN) 层,并在每个 MSA 和 MLP之后使用残差连接。
可以看到 Swin Transformer Block 和 ViT Block 的区别就在于将 ViT 的多头注意力机制 MSA 替换为了 Shifted Window-based MSA 和 Window-based MSA。
Stage1: Swin Transformer Block:Window-based MSA
标准 ViT 的多头注意力机制 MSA 采用的是全局自注意力机制,即:计算每个 token 和所有其他 token 的 attention map。全局自注意力机制的计算复杂度是 ,其中, 是 token的数量, 是 Embedding dimension。全局自注意力机制的计算复杂度与序列长度 成平方关系。当图片分辨率较高或是密集预测任务中计算量会过大。
Window-based MSA 不同于普通的 MSA,它在一个个 window 里面去计算 self-attention。假设每个 window 里面包括 个 image patches,则 Window-based MSA 和普通的 MSA 的计算量分别为:
由于 Window 的 patch 数量 远小于图片patch数量 ,Window-based MSA 的计算量与序列长度 成线性关系。
Stage1: Swin Transformer Block:Shifted Window-based MSA
与W-MSA不同的地方在于这个模块存在窗口滑动,所以叫做shifted window。滑动距离是window_size//2,方向是向右和向下。
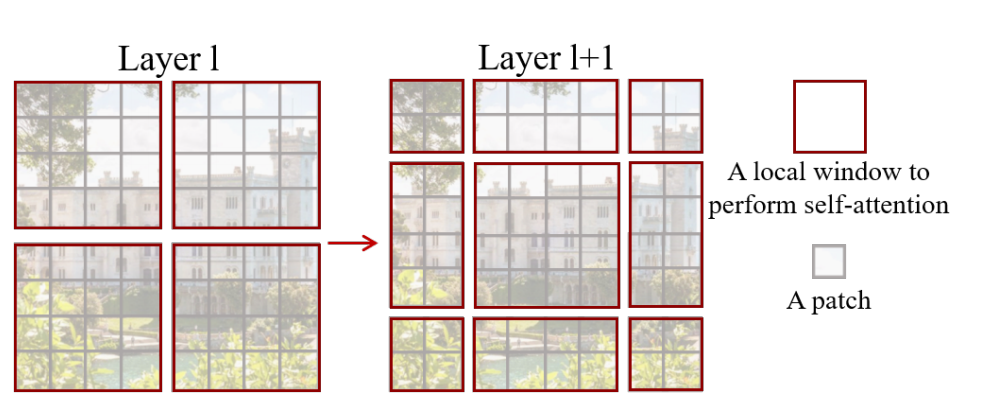
滑动窗口是为了解决W-MSA计算attention时,窗口与窗口之间无法进行信息传递的问题。如下图所示,左侧是网络第L层使用的W-MSA模块,右侧是第L+1层使用SW-MSA模块。对比可以发现,窗口(Windows)发生了偏移。
比如在L+1层特征图上,对于第一行第2列的2x4的窗口,它能够使第L层的第一排的两个窗口信息进行交流。再比如,第二行第二列的4x4的窗口,他能够使第L层的四个窗口信息进行交流,其他同理。
但是引入 Shifted Window 会带来另一个问题就是会造成 window 数发生改变,而且有的 window 大,有的 window 小
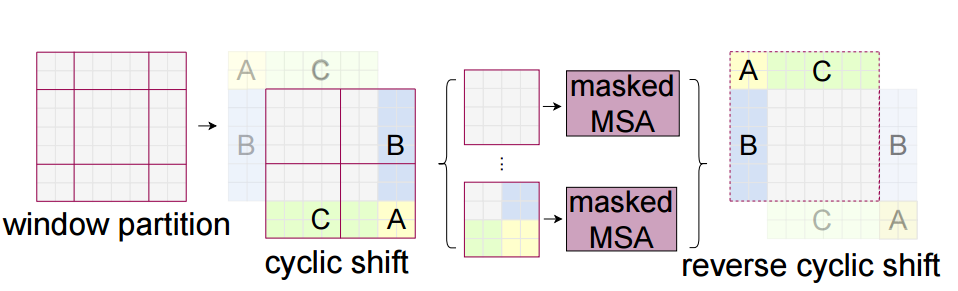
一种简单的解决办法是把所有 window 都做 padding 操作,使之达到相同的大小。但是这会因为 window 数量的增加 (从 增加到 而增加计算量。所以作者在这里提出了一种更加高效的 batch computation 计算方法,通过 cycle shift 的方法,合并小的 windows,仔细看上图,将 A,B,C 这3个小的 windows 进行循环移位,使之合并小的 windows。
经过了 cycle shift 的方法,一个 window 可能会包括来自不同 window 的内容。比如图中右下角的 window,来自4个不同的 sub-window。因此,要采用 masked MSA 机制将 self-attention 的计算限制在每个子窗口内。最后通过 reverse cycle shift 的方法将每个 window 的 self-attention 结果返回。
这里进行下简单的图解,下图代表 cycle shift 的过程,这9个 window 通过移位从左边移动到右侧的位置。
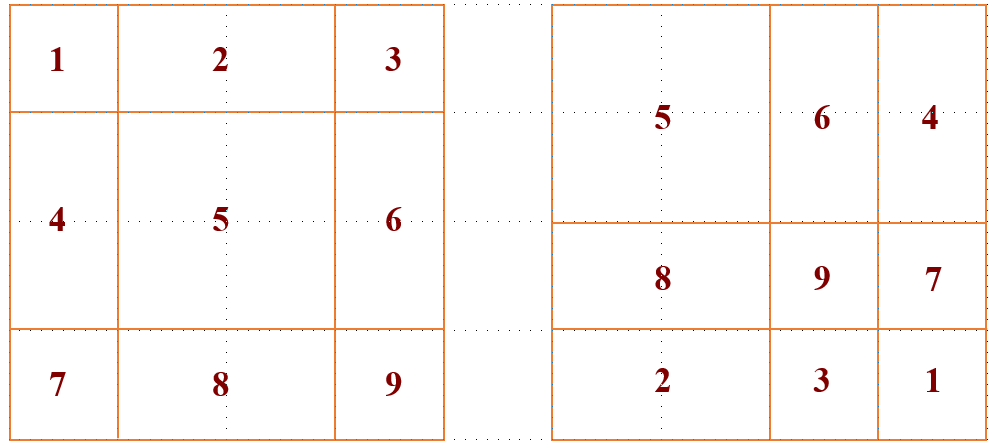
这样再按照之前的 window 划分,就能够得到 window 5 的attention 的结果了。但是这样操作会使得 window 6 和 4 的 attention 混在一起,window 1,3,7 和 9 的 attention 混在一起。所以需要采用 masked MSA 机制将 self-attention 的计算限制在每个子窗口内。具体怎么做呢?
按照 Swin Transformer 的代码实现 (下面会有讲解),还是做正常的 self-attention (在 window_size 上做),之后要进行一次 mask 操作,把不需要的 attention 值给它置为0。
- 例1:比如右上角这个 window,如下图所示。它由4个 patch 组成,所以应该计算出的 attention map是4×4的。但是6和4是2个不同的 sub-window,我们又不想让它们的 attention 发生交叠。所以我们希望的 attention map 应该是下图这个样子。
- 例2:比如右下角这个 window,如下图9所示。它由4个 patch 组成,所以应该计算出的 attention map是4×4的。但是1,3,7和9是4个不同的 sub-window,我们又不想让它们的 attention 发生交叠。所以我们希望的 mask 应该是这个样子。
Stage 2/3/4
Stage 2 的输入是维度是 的张量。从 Stage 2 到 Stage 4 的每个 stage 的初始阶段都会先做一步 Patch Merging 操作,Patch Merging 操作的目的是为了减少 tokens 的数量,它会把相邻的 2×2 个 tokens 给合并到一起,得到的 token 的维度是 。Patch Merging 操作再通过一个的卷积把维度降为 。至此,维度是 的张量经过Patch Merging 操作变成了维度是 的张量。
同理,Stage 3 的Patch Merging 操作会把维度是 的张量变成维度是 的张量。Stage 4 的Patch Merging 操作会把维度是 的张量变成维度是 的张量。
每个 Stage 都会改变张量的维度,形成一种层次化的表征。因此,这种层次化的表征可以方便地替换为各种视觉任务的骨干网络。
相对位置编码
注意 Swin Transformer 的位置编码是加在 attention 矩阵上的,attention 是个四维张量,它的维度是:
(num_windows,num_heads,windows_sizewindows_size,windows_sizewindows_size)
具体操作为
下面具体讲解什么是Relative Position Bias(假设特征图大小为2×2)
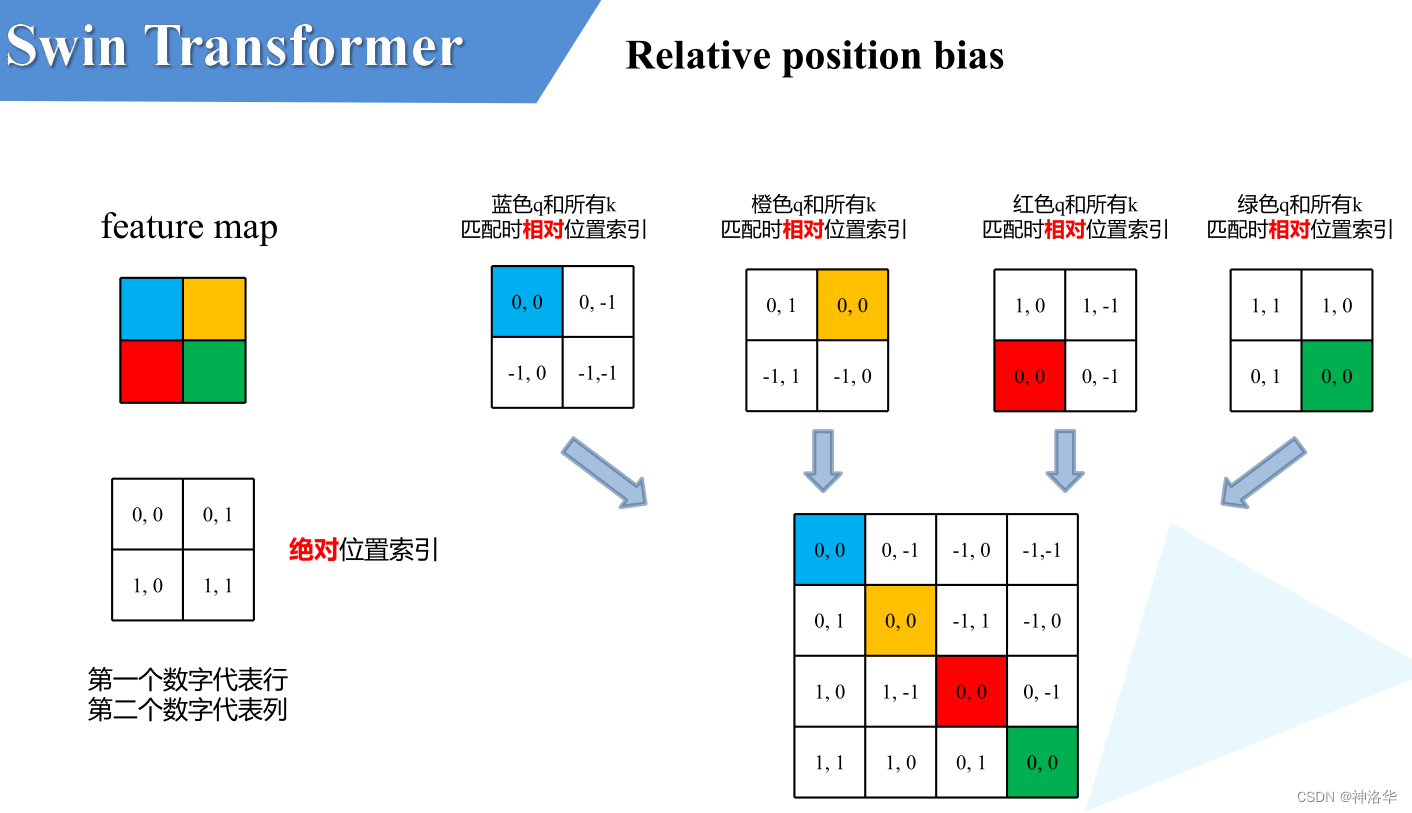
- 计算相对位置索引:比如蓝色像素,在蓝色像素使用q与所有像素k进行匹配过程中,是以蓝色像素为参考点。然后用蓝色像素的绝对位置索引与其他位置索引进行相减,就得到其他位置相对蓝色像素的相对位置索引,同理可以得到其他位置相对蓝色像素的相对位置索引矩阵(第一排四个位置矩阵)。
- 展平拼接:将每个相对位置索引矩阵按行展平,并拼接在一起可以得到第二排的这个4x4矩阵
- 索引转换为一维:在源码中作者为了方便把二维索引给转成了一维索引。
- 取出相对位置偏置参数。真正使用到的可训练参数B 是保存在relative position bias table表里的,其长度是等于 。相对位置偏置参数B,是根据相对位置索引来查relative position bias table表得到的,如下图所示。
为啥表长是 ?考虑两个极端位置,(0,0)能取到的相对位置极值为(-1,-1),(-1,-1)能取到的极值是(1,1),即行和列都能取到(2M-1)个数。考虑到所有的排列组合,表的长度就是
Swin Transformer 的结构
Swin Transformer 分为 Swin-T,Swin-S,Swin-B,Swin-L 这四种结构。使用的 window 的大小统一为 ,每个 head 的embedding dimension 都是 32,每个 stage 的层数如下:
- Swin-T: ,layer number:
- Swin-T: ,layer number:
- Swin-T: ,layer number:
- Swin-T: ,layer number:
Experiments:
图像分类:
数据集:ImageNet
(a)表是直接在 ImageNet-1k 上训练,(b)表是先在 ImageNet-22k 上预训练,再在 ImageNet-1k 上微调。
对标 88M 参数的 DeiT-B 模型,它在 ImageNet-1k 上训练的结果是83.1% Top1 Accuracy,Swin-B 模型的参数是80M,它在 ImageNet-1k 上训练的结果是83.5% Top1 Accuracy,优于DeiT-B 模型。
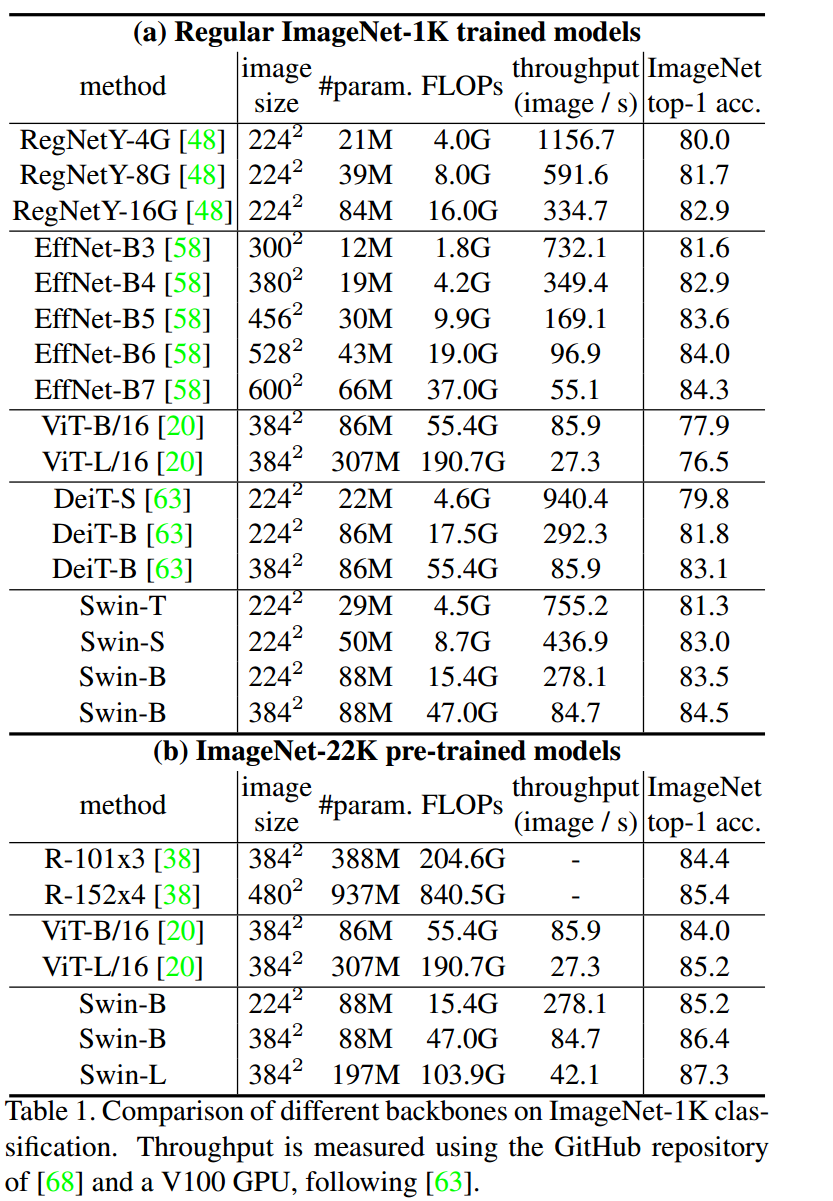
图像分类上比 ViT、DeiT等 Transformer 类型的网络效果更好,但是比不过 CNN 类型的EfficientNet,猜测 Swin Transformer 还是更加适用于更加复杂、尺度变化更多的任务。
2 目标检测:
数据集:COCO 2017 (118k Training, 5k validation, 20k test)
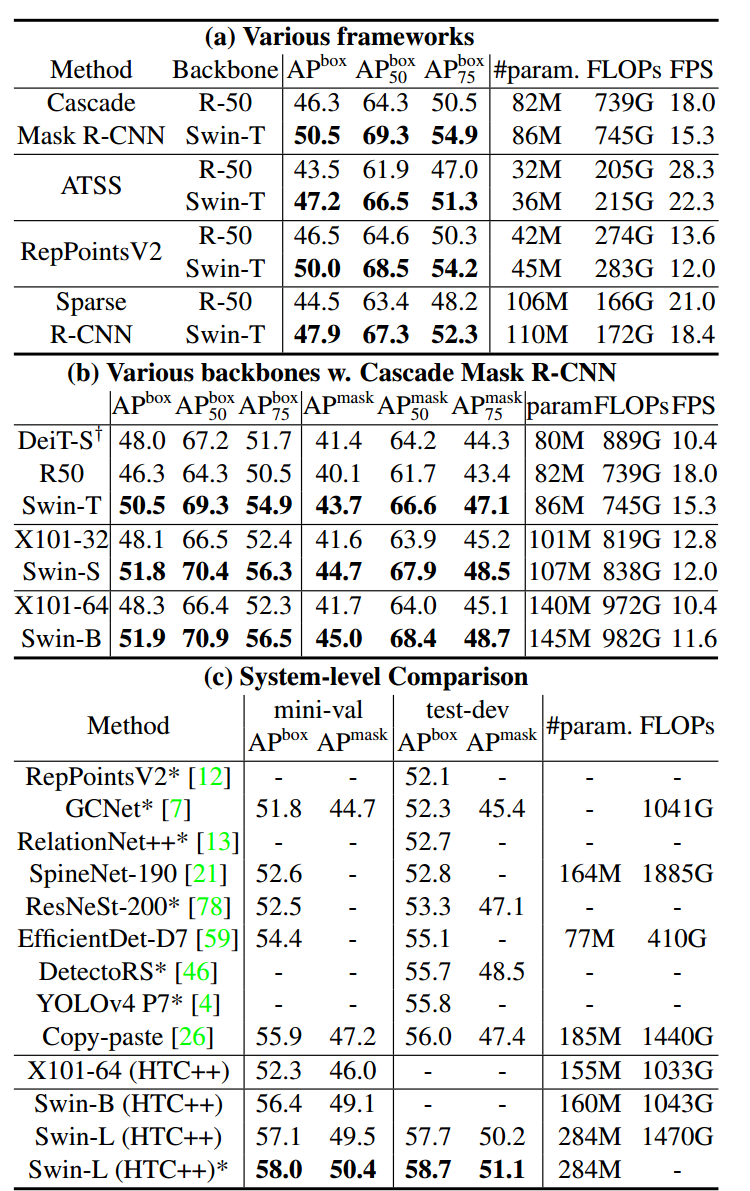
(a) 表是在 Cascade Mask R-CNN, ATSS, RepPoints v2, 和 Sparse RCNN 上对比 Swin-T 和 ResNet-50 作为 Backbone 的性能。
(b) 表是使用 Cascade Mask R-CNN 模型的不同 Backbone 的性能对比。
(c) 表是整体的目标检测系统的对比,在 COCO test-dev 上达到了 58.7 box AP 和 51.1 mask AP。
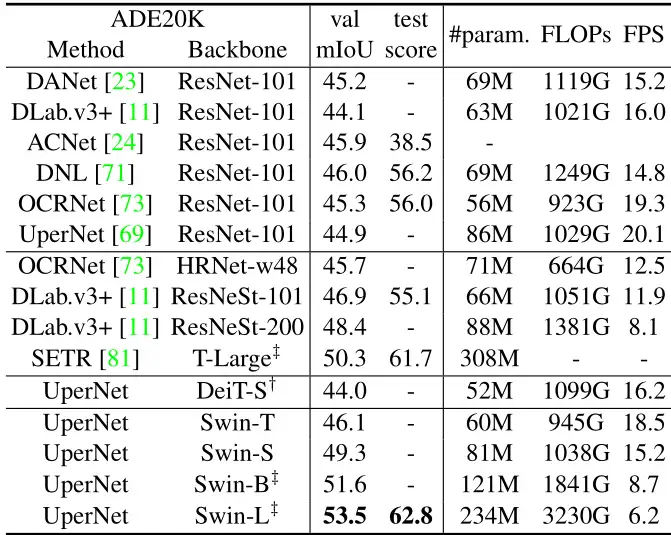
语义分割:
数据集:ADE20K (20k Training, 2k validation, 3k test)
下图13列出了不同方法/Backbone的mIoU、模型大小(#param)、FLOPs和FPS。从这些结果可以看出,Swin-S 比具有相似计算成本的 DeiT-S 高出+5.3 mIoU (49.3 vs . 44.0)。也比ResNet-101 高+4.4 mIoU,比 ResNeSt-101 高 +2.4 mIoU。