
💡 GRPO相比PPO主要优势: 背景 GRPO是 DeepSeekMath model中提出的对PPO方法的改进策略: 强化学习(RL)在提升模型数学推理能力方面被证明是有效的 传统PPO算法需要较大训练资源 GRPO作为PPO的变体被提出,可以更高效地优化模型 PPO回顾 PPO的目标函数为: [公式] 其中: [Math] 和 [Math] 分别是当前和旧策略模型 A_t 是优势函数 [Math] 是裁剪相关的超参数 模型训练 如图1上所示,PPO需要同时训练一个Value Model [Math] 和策略模型, 同时需要reference model(通常从SFT model初始化)来限制策略模型训练保持和reference model的行为接近,而 Reward model用来计算...
Large Model
2026-01-11
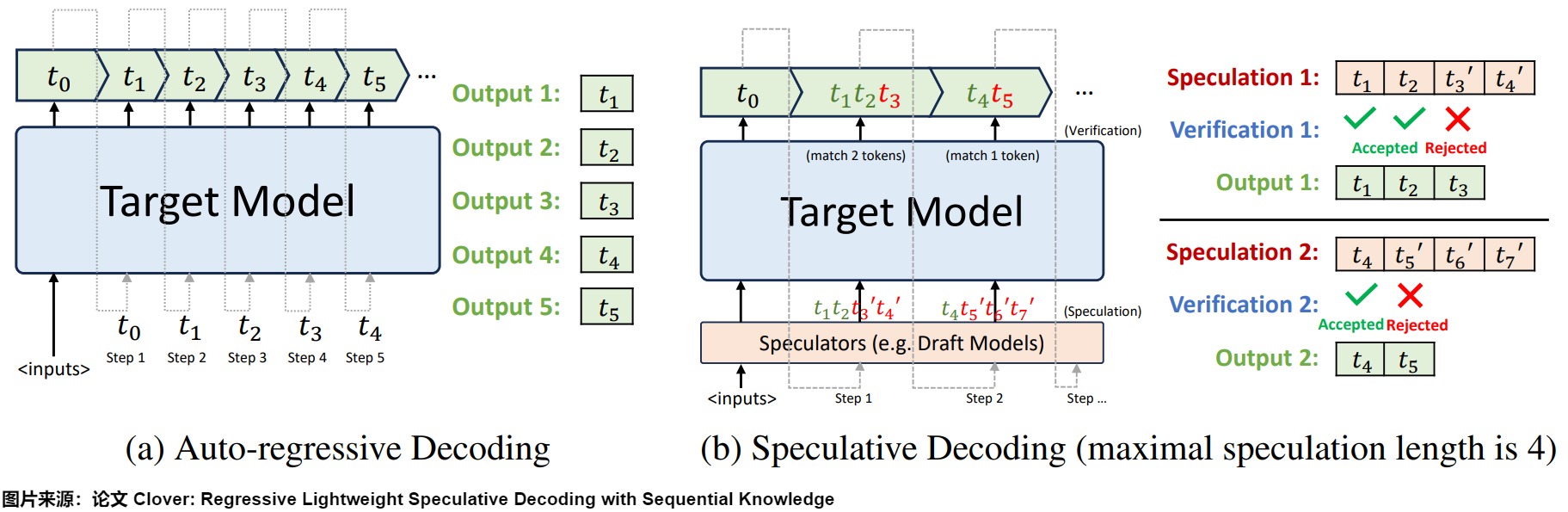
概述 投机解码(Speculative Decoding)也叫预测解码/投机采样,它会利用小模型来预测大型模型的行为,从而提升模型在解码(decoding)阶段的解码效率问题,加速大型模型的执行。其核心思路如下图所示,首先以低成本的方式(以小模型为主,也有多头,检索,Early Exit 等方式)快速生成多个候选 Token(串行序列、树、多头树等),然后通过一次并行验证阶段快速验证多个 Token的正确性,只要平均每个 Step 验证的 Token 数 1,就可以一次性生成多个token,进而减少总的 Decoding 步数,实现加速的目的。 下图左侧是自回归解码模型,右侧是投机解码机制。 从本质上来说,投机解码希望在推理阶段在不大幅度改变模型的情况下,通过更好利用冗余算力来并行"投机"地...
Computer Vision
2026-01-11

上图是Yolo v4中,对各种detector部件的总结:包含Input、backbone、neck、head、... Backbone Neck 例如:SPP 、 ASPP 、 RFB、 SAM 用来增加感受野 特征融合,主要是指不同输出层直接的特征融合,主要包括FPN、PAN、SFAM、ASFF和BiFPN。 结构 One stage TwoStage Anchor Free Transformer Problems
Reinforcement Learning
2026-01-11
引言 大语言模型(LLMs)在近年来取得了显著进展,展现出上下文学习、指令跟随和逐步推理等突出特性。然而,由于这些模型是在包含高质量和低质量数据的预训练语料库上训练的,它们可能会表现出编造事实、生成有偏见或有毒文本等意外行为。因此,将LLMs与人类价值观对齐变得至关重要,特别是在帮助性、诚实性和无害性(3H)方面。 基于人类反馈的强化学习(RLHF)已被验证为有效的对齐方法,但训练过程复杂且不稳定。本文深入分析了RLHF框架,特别是PPO算法的内部工作原理,并提出了PPOmax算法,以提高策略模型训练的稳定性和效果。 RLHF的基本框架 RLHF训练过程包括三个主要阶段: 1. 监督微调(SFT):模型通过模仿人类标注的对话示例来学习一般的人类对话方式, 优化模型的指令跟随能力 1. 奖励模...
Deep Learning
2026-01-11

Random erasing data augmentation 论文名称:Random erasing data augmentation 论文地址:https://arxiv.org/pdf/1708.04896v2.pdf 随机擦除增强,非常容易理解。作者提出的目的主要是模拟遮挡,从而提高模型泛化能力,这种操作其实非常make sense,因为我把物体遮挡一部分后依然能够分类正确,那么肯定会迫使网络利用局部未遮挡的数据进行识别,加大了训练难度,一定程度会提高泛化能力。其也可以被视为add noise的一种,并且与随机裁剪、随机水平翻转具有一定的互补性,综合应用他们,可以取得更好的模型表现,尤其是对噪声和遮挡具有更好的鲁棒性。具体操作就是:随机选择一个区域,然后采用随机值进行覆盖,模拟遮...
Computer Vision
2026-01-11
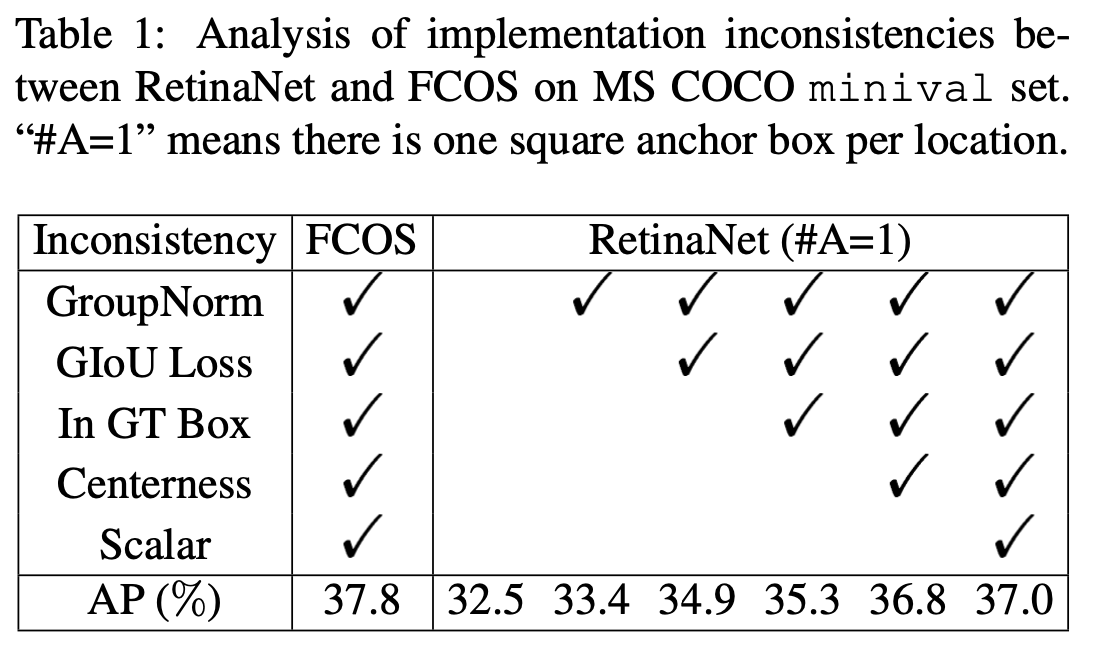
Introduction 由于FPN和Focal loss 的加入,anchorfree模型变得越来越多。在仔细比对了anchorbased和anchorfree目标检测方法后,结合实验结果,论文认为两者的性能差异主要来源于正负样本的定义,假如训练过程中使用相同的正负样本,两者的最终性能将会相差无几。 作者将目前的Anchorfree分为两个大类: 1. keypointbased methods:以CornerNet和ExtremeNet为代表,首先定位几个预定义或自学习的关键点,然后限制物体的空间范围; 1. centerbased methods:以FCOS和Foveabox为代表,使用物体的中心点或区域定义基准点,然后预测从该点到物体边界的四个距离。 为此,论文提出ATSS( Ada...
Computer Vision
2026-01-11
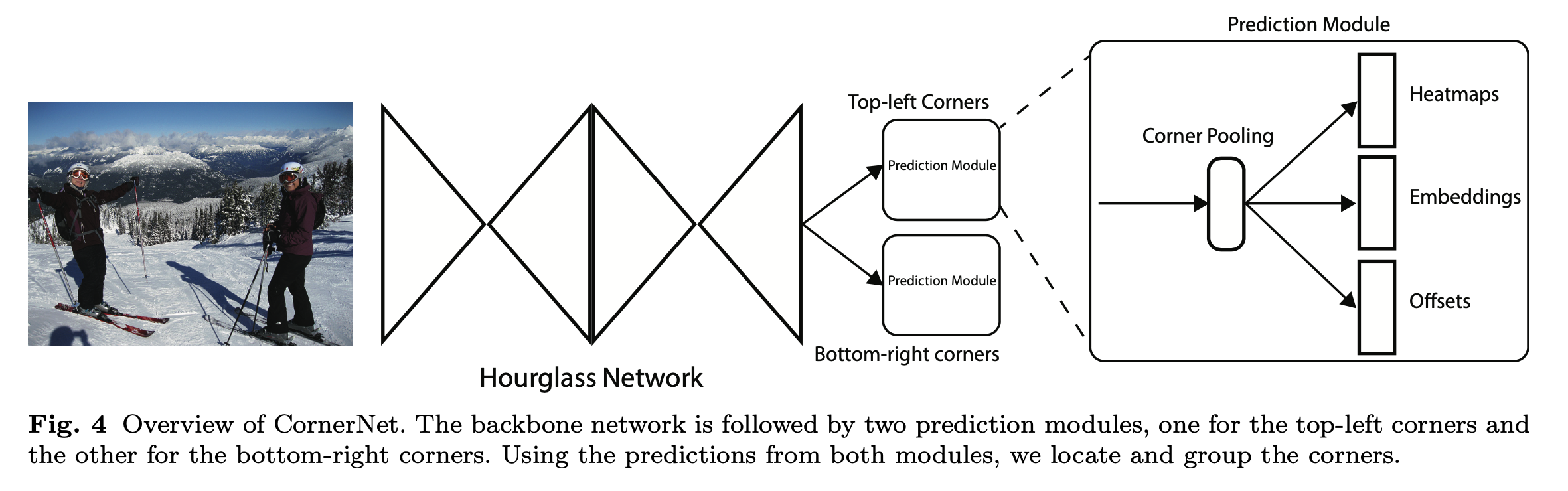
简介 CornerNet是密歇根大学Hei Law等人在发表ECCV2018的一篇论文,作者总结目前anchorbased方法存在两个缺点: 1. 提取的anchor boxes数量较多,比如DSSD使用40k, RetinaNet使用100k,anchor boxes众多造成anchor boxes正负样本的不均衡; 1. anchor boxes需要调整很多超参数,比如anchor boxes数量、尺寸、比率,影响模型的训练和推断速率。 作者的思路其实来源于一篇多人姿态估计的论文"Endtoend learning for joint detection and grouping"。基于CNN的2D多人姿态估计方法,通常有2个思路(BottomUp Approaches和TopDown ...
Computer Vision
2026-01-11
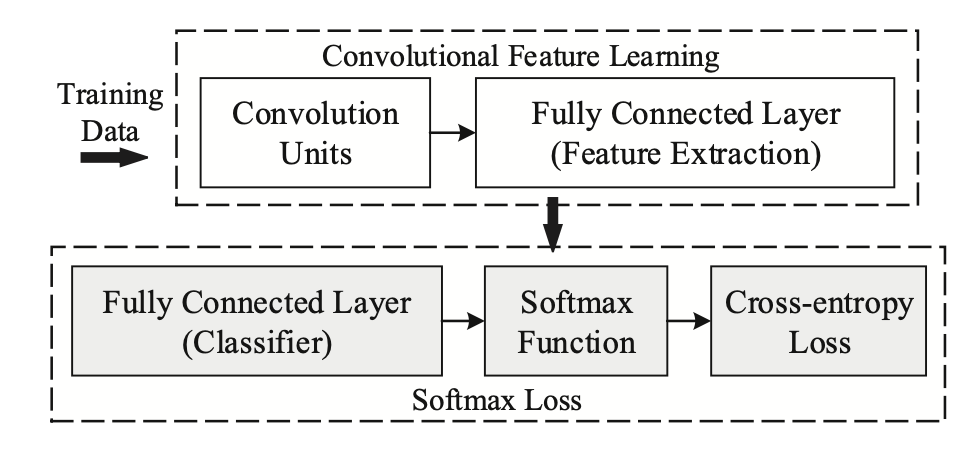
近期,人脸识别研究领域的主要进展之一集中在了 Softmax Loss 的改进之上;本文从两种主要的改进方式——做归一化以及增加类间 margin——展开梳理,介绍了近年来基于 Softmax 的 Loss 的研究进展。 Softmax简介 Softmax Loss 因为其易于优化,收敛快等特性被广泛应用于图像分类领域。然而,直接使用 softmax loss 训练得到的 feature 拿到 retrieval,verification 等“需要设阈值”的任务时,往往并不够好。 这其中的原因还得从 Softmax 的本身的定义说起,Softmax loss 在形式上是 softmax 函数加上交叉熵损失,它的目的是让所有的类别在概率空间具有最大的对数似然,也就是保证所有的类别都能分类正确,...
Computer Vision
2026-01-11

Motivation 我们知道object detection的算法主要可以分为两大类:twostage detector和onestage detector。前者是指类似Faster RCNN,RFCN这样需要region proposal的检测算法,这类算法可以达到很高的准确率,但是速度较慢。虽然可以通过减少proposal的数量或降低输入图像的分辨率等方式达到提速,但是速度并没有质的提升。后者是指类似YOLO,SSD这样不需要region proposal,直接回归的检测算法,这类算法速度很快,但是准确率不如前者。作者提出focal loss的出发点也是希望onestage detector可以达到twostage detector的准确率,同时不影响原有的速度。 既然有了出发点,那么...
Computer Vision
2026-01-11
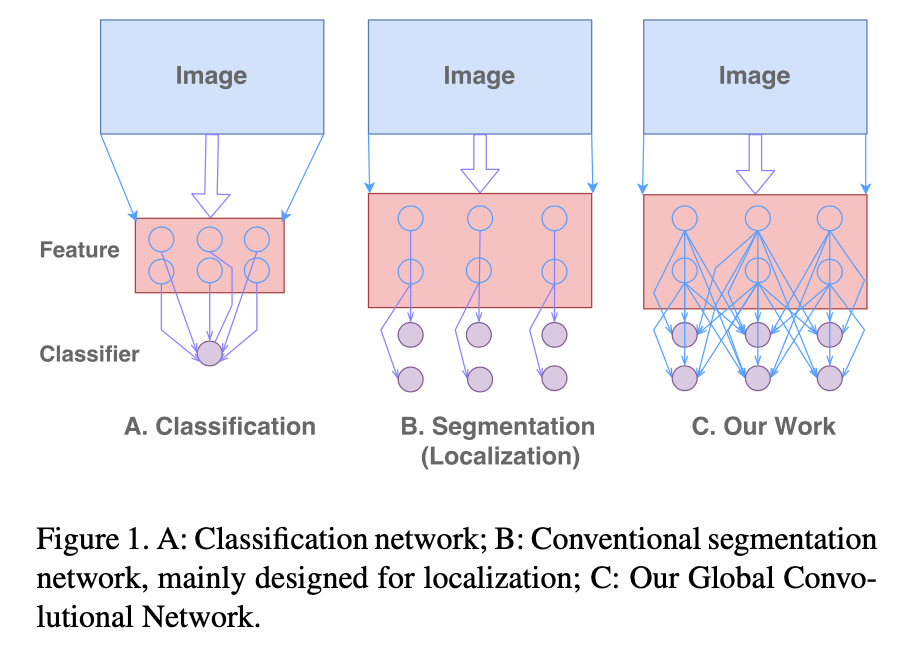
CVPR2017 算法 Global Convolutional Network(GCN),江湖人送外号“Large Kernel”。 Motivation GCN 主要将 Semantic Segmentation分解为:Classification 和 Localization两个问题。但是,这两个任务本质对特征的需求是矛盾的,Classification需要特征对多种Transformation具有不变性,而 Localization需要对 Transformation比较敏感。但是,普通的 Segmentation Model大多针对 Localization Issue设计,正如图(b)所示,而这不利于 Classification。 所以,为了兼顾这两个 Task,本文提出了两个...
Computer Vision
2026-01-11
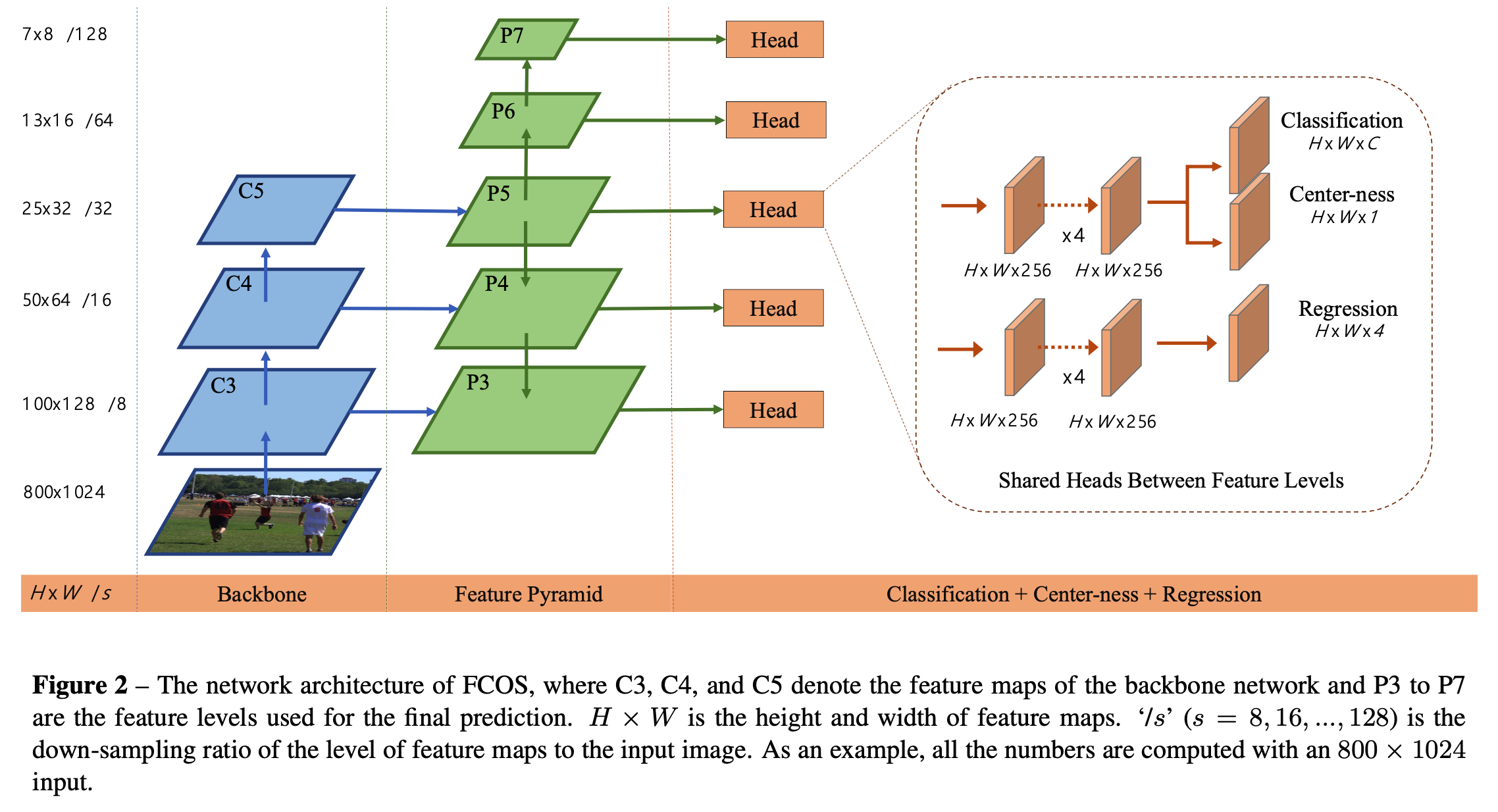
先要明确的知道,FCOS是一个基于FCN(全卷积网络用于目标检测)、一阶段(one stage)、anchor free、proposal free、参考语义分割思想 实现的逐像素目标检测的模型。 简要介绍下FCOS几个核心点: (1)FCOS方法借鉴了FCN的思想,对 feature map 上每个特征点做回归操作,预测四个值 , 分别代表特征点到Ground Truth Bounding box上、下、左、右边界的距离。 (2)特征点映射会原图后对应多个GT Bounding box,无法准确判断原图像素所属类别,因此模型引入 FPN 结构,利用不同的层来处理不同尺寸的目标框。 (3)远离目标中心点可能会产生劣质预测结果,为了增强中心点选取的准确性,模型引入了Centerness lay...