计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Computer Vision
2026-01-11

原理分析 网络架构: 本文的任务是Object detection,用到的工具是Transformers,特点是Endtoend。 目标检测的任务是要去预测一系列的Bounding Box的坐标以及Label, 现代大多数检测器通过定义一些proposal,anchor或者windows,把问题构建成为一个分类和回归问题来间接地完成这个任务。文章所做的工作,就是将transformers运用到了object detection领域,取代了现在的模型需要手工设计的工作,并且取得了不错的结果。在object detection上DETR准确率和运行时间上和Faster RCNN相当;将模型 generalize 到 panoptic segmentation 任务上,DETR表现甚至还超过了其他...
Large Model
2026-01-11
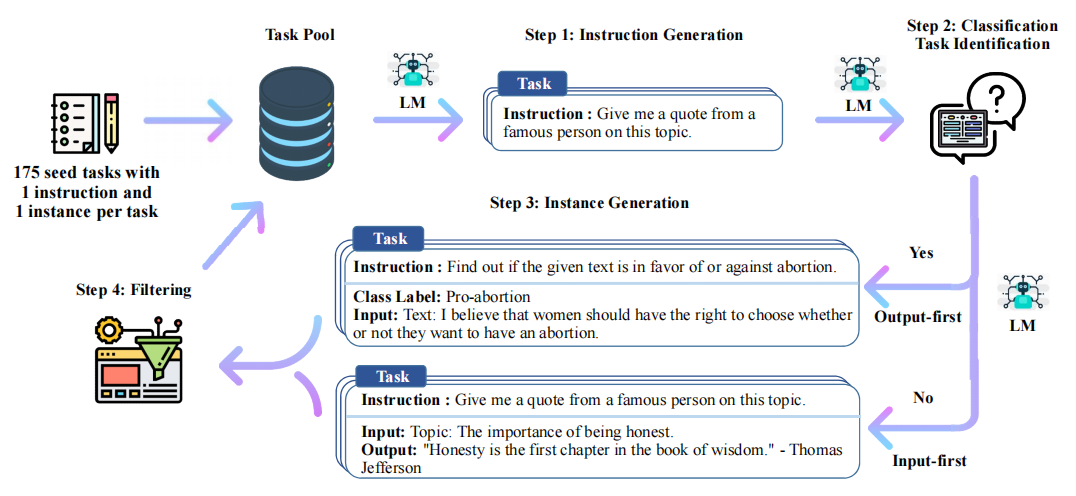
Stanford Alpaca 结合英文语料通过Self Instruct方式微调LLaMA 7B Stanford Alpaca简介 2023年3月中旬,斯坦福的Rohan Taori等人发布Alpaca(中文名:羊驼):号称只花100美元,人人都可微调Meta家70亿参数的LLaMA大模型(即LLaMA 7B),具体做法是通过52k指令数据,然后在8个80GB A100上训练3个小时,使得Alpaca版的LLaMA 7B在单纯对话上的性能比肩GPT3.5(textdavinci003),这便是指令调优LLaMA的意义所在 论文《Alpaca: A Strong OpenSource InstructionFollowing Model》 GitHub地址:https://github.c...
Large Model
2026-01-11
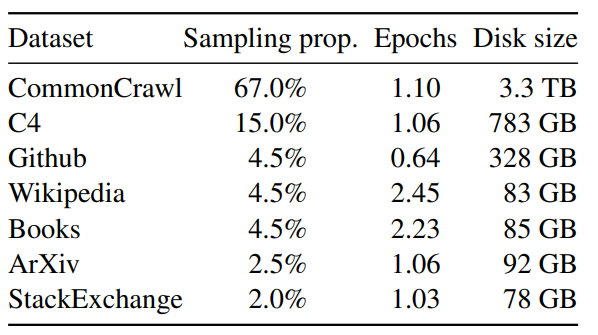
论文名称:LLaMA: Open and Efficient Foundation Language Models 论文地址: https://arxiv.org/pdf/2302.13971.pdf 代码链接: https://github.com/facebookresearch/llama 背景 模型参数量级的积累,或者训练数据的增加,哪个对性能提升帮助更大? 以 GPT3 为代表的大语言模型 (Large language models, LLMs) 在海量文本集合上训练,展示出了惊人的涌现能力以及零样本迁移和少样本学习能力。GPT3 把模型的量级缩放到了 175B,也使得后面的研究工作继续去放大语言模型的量级。大家好像有一个共识,就是:模型参数量级的增加就会带来同样的性能提升。 但...
Large Model
2026-01-11
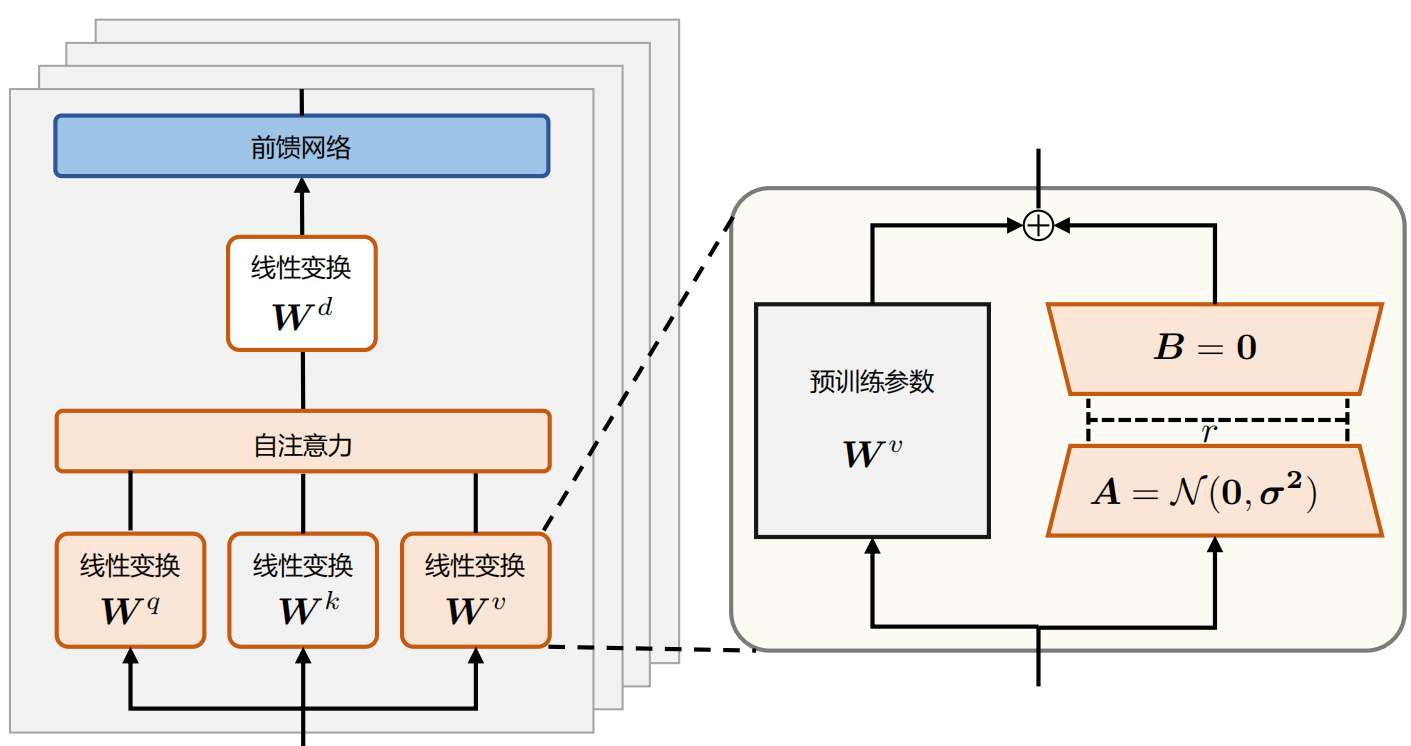
背景 随着预训练语言模型进入LLM时代,其参数量愈发庞大。全量微调模型所有参数所需的显存早已水涨船高。 例如: 全参微调Qwen1.57BChat预估要2张80GB的A800,160GB显存 全参微调Qwen1.572BChat预估要20张80GB的A800,至少1600GB显存。 而且,通常不同的下游任务还需要LLM的全量参数,对于算法服务部署来说简直是个灾难 当然,一种折衷做法就是全量微调后把增量参数进行SVD分解保存,推理时再合并参数 为了寻求一个不更新全部参数的廉价微调方案,之前一些预训练语言模型的高效微调(Parameter Efficient finetuning, PEFT)工作,要么插入一些参数或学习外部模块来适应新的下游任务。 LoRA LoRA(LowRank Adapt...
Computer Vision
2026-01-11

简介 一个完整的人脸识别系统包含以下几个模块 Face Detection: 人脸检测 Face Alignment:基于人脸关键点坐标对齐到正则坐标系下坐标 Face Recognition:基于对齐人脸进行识别 人脸识别的算法流程 人脸的识别流程:面部姿态处理(处理姿态,亮度,表情,遮挡),特征提取,人脸比对。 面部处理 face processing 这部分主要对姿态(主要)、亮度、表情、遮挡进行处理,可提升FR模型性能 主要包含两种处理方式: 1. "Onetomany Augmentation": 从单个图像生成不同姿态的图像,使模型学习到姿态不变性的表示 1. "Manytoone Normalization": 从多个不同姿态的图像中恢复人脸图像的标准视图 特征提取 Backb...

论文地址: 🔖 https://arxiv.org/pdf/2107.11291 代码地址: 前言 一般来说,我们可以把姿态估计任务分成两个流派:Heatmapbased和Regressionbased。 其主要区别在于监督信息的不同,Heatmapbased方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或softargmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression...
Generative Model
2026-01-11

🔖 https://stability.ai/news/stablediffusion3researchpaper 概述 SD3 模型与训练策略改进细节 SD3除了将去噪网络从 UNet 改成 DiT 外,SD3 还在模型结构与训练策略上做了很多小改进: 改变训练时噪声采样方法 将一维位置编码改成二维位置编码 提升 VAE 隐空间通道数 对注意力 QK 做归一化以确保高分辨率下训练稳定 本文会简单介绍这些改进。 论文阅读 核心贡献 介绍 Stable Diffusion 3 (SD3) 的文章标题为 Scaling Rectified Flow Transformers for HighResolution Image Synthesis。与其说它是一篇技术报告,更不如说它是一篇论文,因为它...
Large Model
2026-01-11
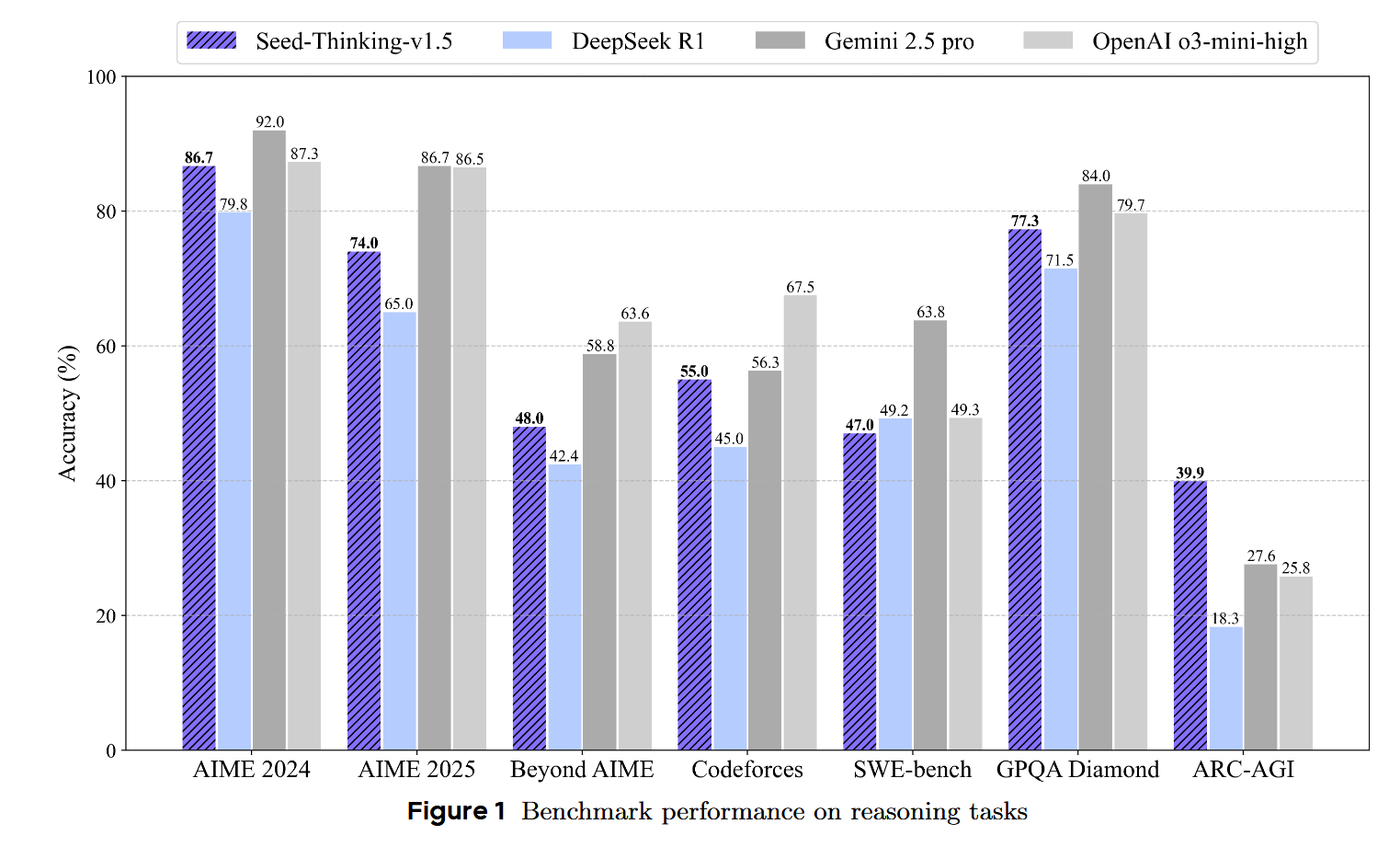
SeedThinkingv1.5 SeedThinkingv1.5 是 ByteDance Seed 团队开发的一个先进推理模型,采用 MixtureofExperts (MoE) 架构,具有 200B 总参数和 20B 激活参数。该模型的核心创新在于其"思考后回答"的机制,在数学、编程、科学推理等任务上取得了卓越的性能。相比DeepSeek R1 ,在很多数据指标上都取得了一定程度的进步。 数据 训练数据分为两大类:可验证问题(有明确答案)和不可验证问题(无明确答案)。模型的推理能力主要来自第一部分,并能泛化到第二部分。 可验证问题数据 可验证数据主要包含 STEM数据, 编程数据,以及逻辑推理数据 STEM 数据 编程数据 逻辑推理数据 不可验证问题数据 这其中的数据主要包含需要基于人类...
Large Model
2026-01-11
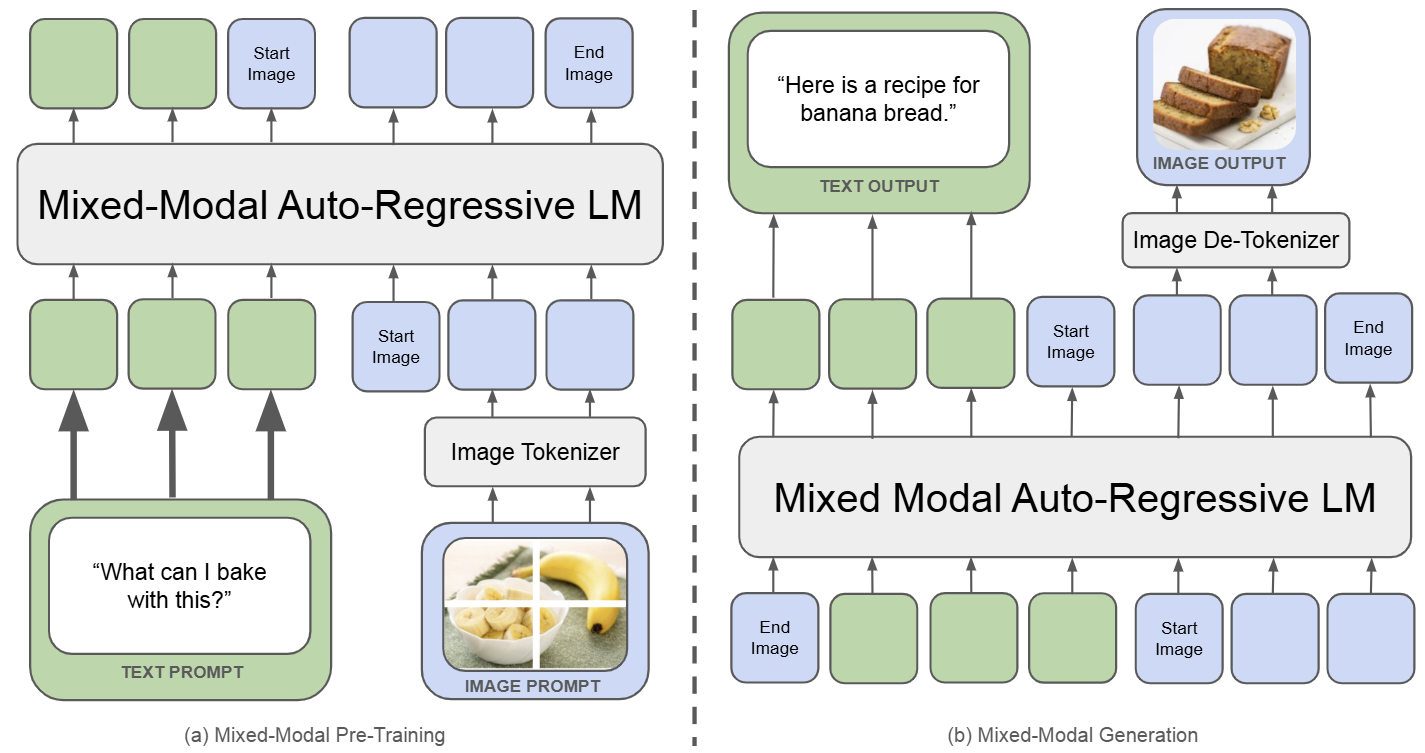
Chameleon:生成理解统一模型的开山之作 🔖 https://arxiv.org/pdf/2405.09818 Chameleon 是一个既能做图像理解,又可以做图像或者文本生成任务的,从头训练的 Transformer 模型。完整记录了为实现 mixedmodal 模型的架构设计,稳定训练方法,对齐的配方。并在一系列全面的任务上进行评估:有纯文本任务,也有图像文本任务 (视觉问答、图像字幕),也有图像生成任务,还有混合模态的生产任务。 如下图所示,Chameleon 将所有模态数据 (图像、文本和代码) 都表示为离散 token,并使用统一的 Transformer 架构。训练数据是交错混合模态数据 ∼10T token,以端到端的方式从头开始训练。文本 token 用绿色表示,图像...
Computer Vision
2026-01-11

一、IOU(Intersection over Union) 1. 特性(优点) IoU就是我们所说的交并比,是目标检测中最常用的指标,在anchorbased的方法中,他的作用不仅用来确定正样本和负样本,还可以用来评价输出框(predict box)和groundtruth的距离。 1. 可以说它可以反映预测检测框与真实检测框的检测效果。 1. 还有一个很好的特性就是尺度不变性,也就是对尺度不敏感(scale invariant), 在regression任务中,判断predict box和gt的距离最直接的指标就是IoU。(满足非负性;同一性;对称性;三角不等性) [代码] 2. 作为损失函数会出现的问题(缺点) 1. 如果两个框没有相交,根据定义,IoU=0,不能反映两者的距离大小(重...
Computer Vision
2026-01-11
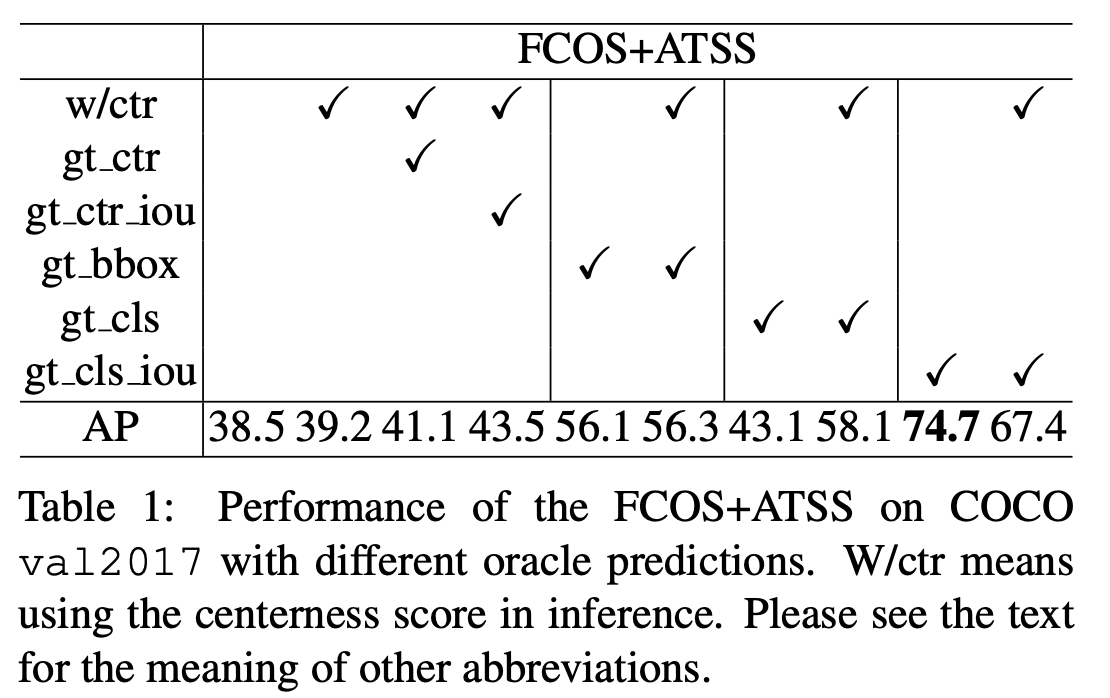
Introduction 目标检测中NMS需要依据候选检测目标的排序来进行筛选框,如果分类得分较低,但是定位框准确会导致在NMS中将该bbox框被排除掉,因此这个排序的可靠性就非常重要。之前的工作主要采用IOU分支(IOUNet)与Centerness得分(FCOS)来作为大量候选检测的排序依据。 然而,本文认为这些方法可以有效缓解分类得分和物体定位精度之间的不对齐问题。 但是,它们是次优解的,因为将两个不完善的预测相乘可能会导致排名依旧变差,作者经过试验表明,通过这种方法实现的性能上限非常有限。 此外,增加一个额外的网络分支来预测定位分数并不是一个很好的解决方案,并且会带来额外的计算负担。 基于上述分析,作者提出:不采用预测一个额外的定位精确度得分(IOUaware Centerness)...