Reinforcement Learning
2026-01-11

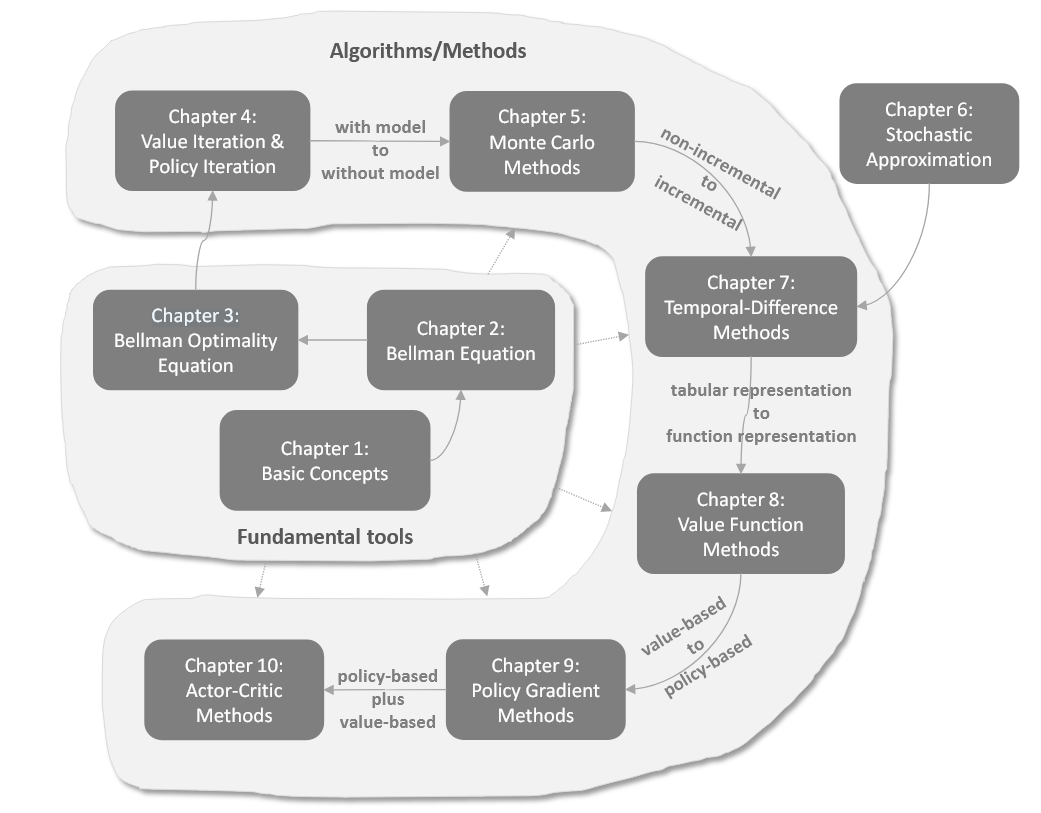
引言 时序差分(TemporalDifference,TD)方法是强化学习中的一类核心算法,它结合了动态规划与蒙特卡洛方法的优点。TD方法是无模型(modelfree)学习方法,不需要环境模型即可学习价值函数和最优策略。 TD方法的核心特点是通过比较不同时间步骤的估计值之间的差异来更新价值函数,这种差异被称为"时序差分误差"(TD error)。TD方法可以被视为解决贝尔曼方程或贝尔曼最优方程的特殊随机逼近算法。 基础TD算法:状态值函数学习 给定策略 [Math] ,基础TD算法用于估计状态值函数 [Math] 。假设我们有一些按照策略 [Math] 生成的经验样本 (s_0, r_1, s_1, ..., s_t, r_{t+1}, s_{t+1}, ...) ,TD算法的更新规则为: ...