
论文地址: 🔖 https://arxiv.org/pdf/2107.11291 代码地址: 前言 一般来说,我们可以把姿态估计任务分成两个流派:Heatmapbased和Regressionbased。 其主要区别在于监督信息的不同,Heatmapbased方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或softargmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression...
NLP
2026-01-11

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4,不算太老,而SSM最新最火的变体大概是Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mam...
Algorithm
2026-01-11
题目 给定一个无序的数组,找出数组在排序之后,相邻元素之间最大的差值。 如果数组元素个数小于 2,则返回 0。 Example 1: [代码] 解题思路:如果进行排序,这里会超时。采用桶排序 排序算法 的思想,可以在线性时间解决。 1. 首先建立桶,每个桶中只需要存放这个桶中元素的最大值和最小值。 1. 我们期望将数组中的各个数等距离分配,也就是每个桶的长度相同,也就是对于所有桶来说,桶内最大值减去桶内最小值都是一样的。可以当成公式来记。 1. 确定桶的数量,最后的加一保证了数组的最大值也能分到一个桶。为什么需要这样规定桶的尺寸呢?因为这样可以让最大的间距的两个元素在两个不同的桶中。可以证明一下,因为我们用元素范围之差除以元素个数,所以桶的尺寸就是平均的元素间距,显然最大间距的两个元素不可能...
Algorithm
2026-01-11
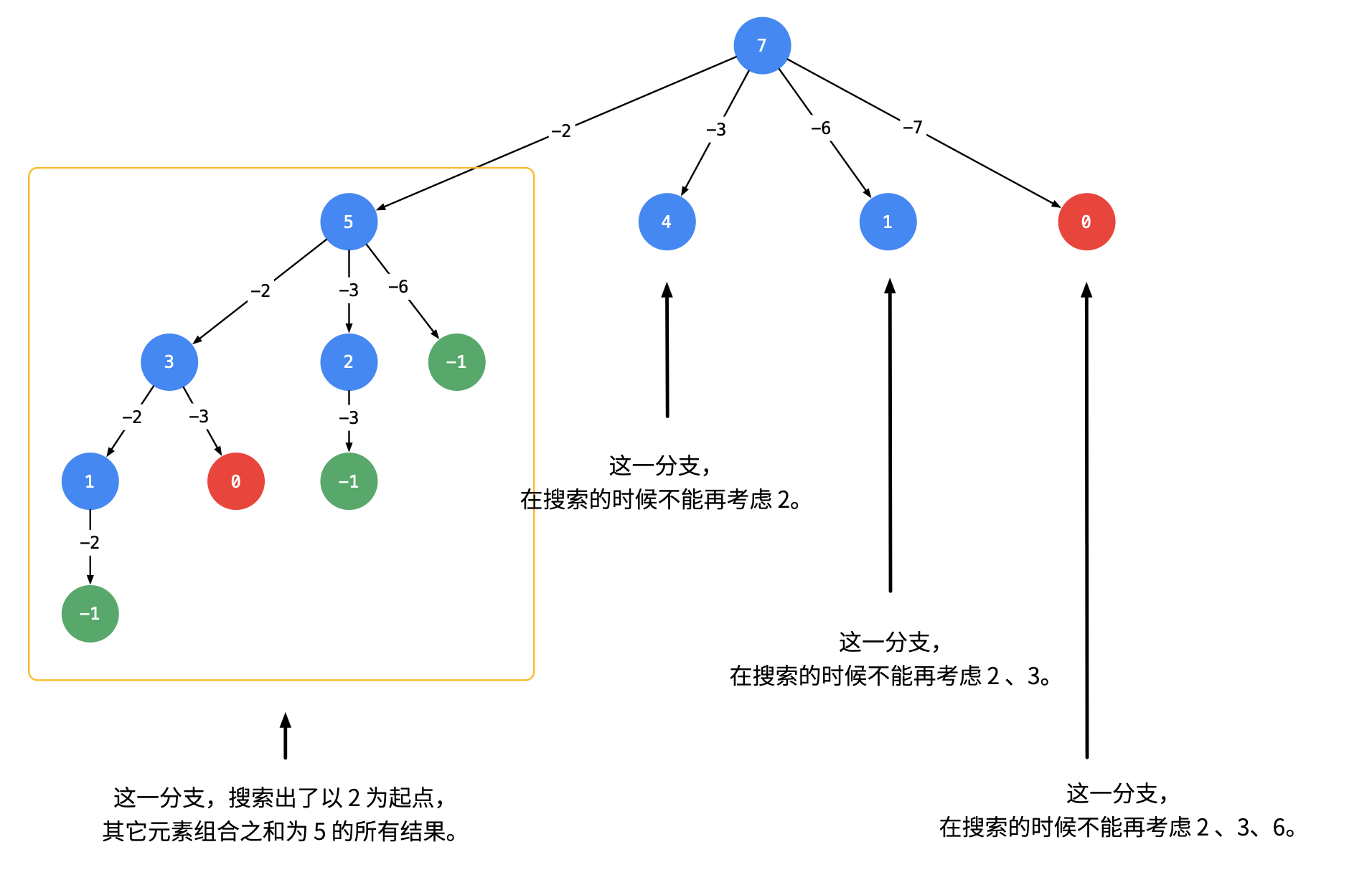
1. 可以重复选取 给定一个无重复元素的数组 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的数字可以无限制重复被选取。 画出树状搜索图如下, 为了去除重复的情况, 我们需要按照某种顺序搜索,具体做法是:每一次搜索的时候,设置下一轮搜索的起点 [代码] 2. 不能被重复选取 与上面的区别在于 1. index每次不要重复搜索,而是去寻找下一个 1. 排除重复的元素 [代码]
3D Model
2026-01-11

概述 问题定义 广义的 Gaze Estimation 泛指与眼球、眼动、视线等相关的研究,因此有不少做 saliency 和 egocentric 的论文也以 gaze 为关键词。而本文介绍的 Gaze Estimation 主要以眼睛图像或人脸图像为处理对象,估算人的视线方向或注视点位置, 如下图所示。 gaze角度的表示一般使用一个3d向量作为表示,也可以转换为pitch 和yaw角度,具体可参考 Model Gaze模型一般使用回归模型,所以这里基本只介绍一些在gaze model中使用的小技巧 Rle Loss 实际问题
NLP
2026-01-11

概述 众所周知,尽管基于Attention机制的Transformer类模型有着良好的并行性能,但它的空间和时间复杂度都是 [Math] 级别的, n 是序列长度,所以当 n 比较大时Transformer模型的计算量难以承受。近来,也有不少工作致力于降低Transformer模型的计算量,比如模型剪枝、量化、蒸馏等精简技术,又或者修改Attention结构,使得其复杂度能降低到 [Math] 甚至 [Math] 。 改变这一复杂度的思路主要有两种: 一是走稀疏化的思路,比如OpenAI的Sparse Attention,通过“只保留小区域内的数值、强制让大部分注意力为零”的方式,来减少Attention的计算量。经过特殊设计之后,Attention矩阵的大部分元素都是0,因此理论上它也能节...
Preformer Performer的出发点还是标准的Attention,所以在它那里还是有 [Math] ,然后它希望将复杂度线性化,那就是需要找到新的 [Math] ,使得: [公式] 如果找到合理的从 [Math] 到 [Math] 的映射方案,便是该思路的最大难度了。 激活函数 线性Attention的常见形式如 式3,其中 [Math] 、 [Math] 是值域非负的激活函数。那么如何选取这个激活函数呢?Performer告诉我们,应该选择指数函数 [公式] 首先,我们来看它跟已有的结果有什么不一样。在 Transformers are RNNs 给出的选择是: [公式] 我们知道 1+x 正是 e^x 在 x=0 处的一阶泰勒展开,因此 [Math] 这个选择其实已经相当接近 ...
NLP
2026-01-11
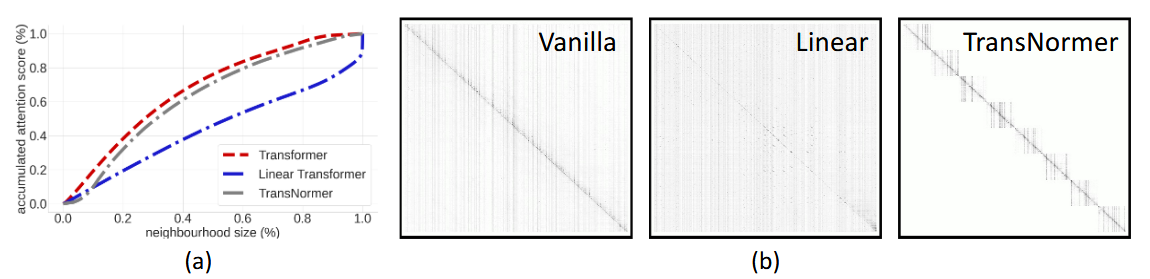
简介 承接 Transformers are RNNs 这篇论文 目的: 为了分析之前linear transformer的效果为什么不好。发现主要是两个原因造成的: 1. 无界梯度(unbounded gradient),会导致模型在训练时不稳定,收敛不好; 1. 注意力稀释(attention dilution),transformer在lower level时应该更关注局部特征,而higher level更关注全局特征,但线性transformer中的attention往往weight 更均匀化,不能聚焦在local区域上,因此称为attention稀释。 解决方案: 1. 对linear attention算出来的output接着做个normalization,形成NormForme...
01背包 描述 有N件物品和一个容量为V的背包。 第i件物品的体积是vi,价值是wi。 求解将哪些物品装入背包,可使这些物品的总体积不超过背包流量,且总价值最大。 二维动态规划 f[i][j] 表示只看前i个物品,总体积是j的情况下,总价值最大是多少。 result = max(f[n][0V]) f[i][j]: 不选第i个物品:f[i][j] = f[i1][j]; 选第i个物品:f[i][j] = f[i1][jv[i]] + w[i](v[i]是第i个物品的体积) 两者之间取最大。 初始化:f[0][0] = 0 代码如下: [代码] 一维动态优化 从上面二维的情况来看,f[i] 只与f[i1]相关,因此只用使用一个一维数组[0v]来存储前一个状态。那么如何来实现呢? 第一个问题:状...
Algorithm
2026-01-11
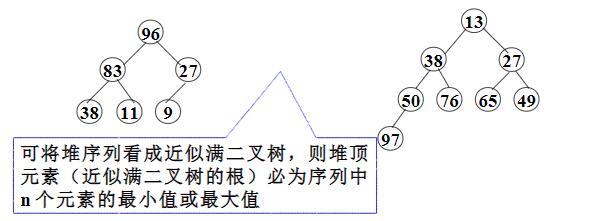
起步 heapq 模块实现了适用于Python列表的最小堆排序算法。 堆是一个树状的数据结构,其中的子节点都与父母排序顺序关系。因为堆排序中的树是满二叉树,因此可以用列表来表示树的结构,使得元素 N 的子元素位于 2N + 1 和 2N + 2 的位置(对于从零开始的索引)。 本文内容将分为三个部分,第一个部分简单介绍 heapq 模块的使用;第二部分回顾堆排序算法;第三部分分析heapq中的实现。 heapq 的使用 创建堆有两个基本的方法:heappush() 和 heapify(),取出堆顶元素用 heappop()。 heappush() 是用来向已有的堆中添加元素,一般从空列表开始构建: [代码] 如果数据已经在列表中,则使用 heapify() 进行重排: [代码] 回顾堆排序算...
计数排序、基数排序、桶排序则属于非比较排序,算法时间复杂度O(n),优于比较排序。但是也有弊端,会多占用一些空间,相当于是用空间换时间。 1. 计数排序: 计数排序的基本思想是:对每一个输入的元素a[i],确定小于 a[i] 的元素个数。所以可以直接把 a[i] 放到它输出数组中的位置上。假设有5个数小于 a[i],所以 a[i] 应该放在数组的第6个位置上。 实现代码如下: [代码] 2. 桶排序: 桶排序的基本思想是:把数组a划分为n个大小相同子区间(桶),每个子区间各自排序,最后合并。桶排序要求数据的分布必须均匀,不然可能会失效。计数排序是桶排序的一种特殊情况,可以把计数排序当成每个桶里只有一个元素的情况。 [代码] 算法实现步骤 1. 根据待排序集合中最大元素和最小元素的差值范围和映...
Algorithm
2026-01-11
题目说明 在未排序的数组中找到第 k 个最大的元素。请注意,你需要找的是数组排序后的第 k 个最大的元素,而不是第 k 个不同的元素。 示例 1: 输入: [3,2,1,5,6,4] 和 k = 2 输出: 5 示例 2: 输入: [3,2,3,1,2,4,5,5,6] 和 k = 4 输出: 4 题解 使用快排的思想 [代码]