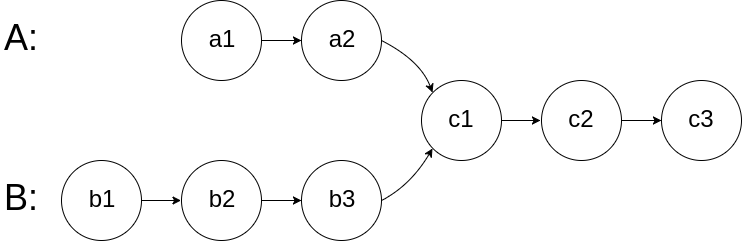
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...
Large Model
2026-01-20
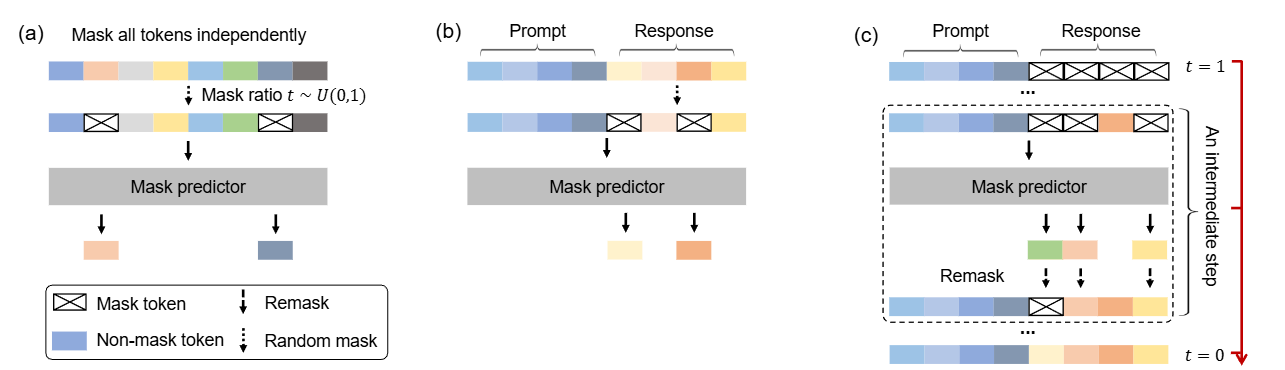
这是一篇尝试改变LLM「范式」的文章:当前主流的LLM架构都是「自回归」的,通俗地理解就是必须「从左到右依次生成」。这篇文章挑战了这一范式,探索扩散模型在 LLMs 上的可行性,通过 随机掩码 - 预测 的逆向思维,让模型学会「全局思考」。 论文: [2502.09992] Large Language Diffusion Models 背景 主流大语言模型架构:自回归模型 (Autoregressive LLMs) 过去几年, 自回归模型(Autoregressive Models, ARMs)一直是大语言模型(LLM)的主流架构。典型的自回归语言模型以Transformer解码器为基础,按照从左到右 的顺序依次预测下一个词元(token)。 形式化地,自回归模型将一个长度为 \(N\) 的文本序列 \(X=(x_1, x_2, ..., x_N)\) 的概率分解为各位置的条件概率连乘积: \[P_{\theta}(x_1, x_2, \dots, x_N) = \prod_{i=1}^{N} P_{\theta}(x_i \mid x_1, x_2, \dots,...
Large Model
2026-01-20
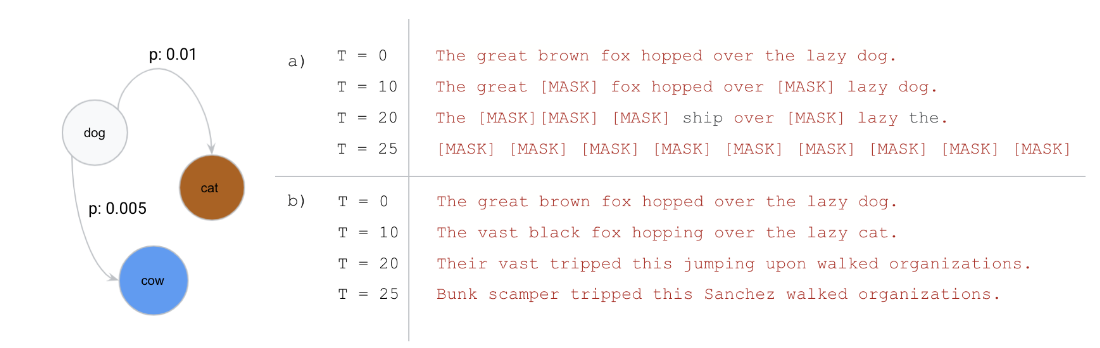
引言 Diffusion模型近年来在图像生成这一连续域任务中取得了显著成果,展现出强大的生成能力。然而,在文本生成这一离散域任务中整体效果仍不尽如人意,未能在该领域引起广泛关注。 去年,一篇研究离散扩散模型在文本生成的文章《Discrete Diffusion Modeling by Estimating the Ratios of the Data Distribution》获得ICML 2024的Best Paper,引发了学术界的广泛兴趣,也激发了新一轮的研究热潮。随后在2025年,越来越多高校和企业也开始积极探索基于Diffusion的文本生成方法。其中,近期备受关注的Block Diffusion也成功入选ICLR oral,进一步推动了该方向的发展。...
Generative Model
2026-01-19

💡 扩散模型:通过加噪的方式去学习原始数据的分布, 从学到的分布中去生成样本 DDPM 关键点: 1. 正向加噪是离散时间马尔可夫链:从 \(x_0\) 逐步加噪得到 \(x_1,x_2,...,x_T\) ;在合适的噪声调度与足够大的 \(T\) 下, \(x_T\) 近似服从 \( N(0,I) \) 的各向同性高斯。 2. 每一步噪声方差 \(β_t\) 满足 \(0<β_t<1\) ,通常随 \(t\) 增大;因此 \(q(x_t|x_{t-1}) \) 的均值缩放系数 \(\sqrt{1-β_t} \) 逐渐减小。 3. 训练通过最大化对数似然的变分下界(ELBO)来学习反向过程 \( p_θ(x_{t-1}|x_t)\) ,并将其参数化为高斯分布(神经网络预测均值/噪声或 score)。 4. 将目标写成 score/DSM 形式时,loss 的权重与对应噪声层的方差尺度(如 \(1-\bar{α}_t\) 或相关量)有关;采样通常是按学习到的反向转移逐步生成(祖先采样),与经典 Langevin MCMC 更新形式不同,但可在 SDE 视角下统一理解。...
Large Model
2026-01-15

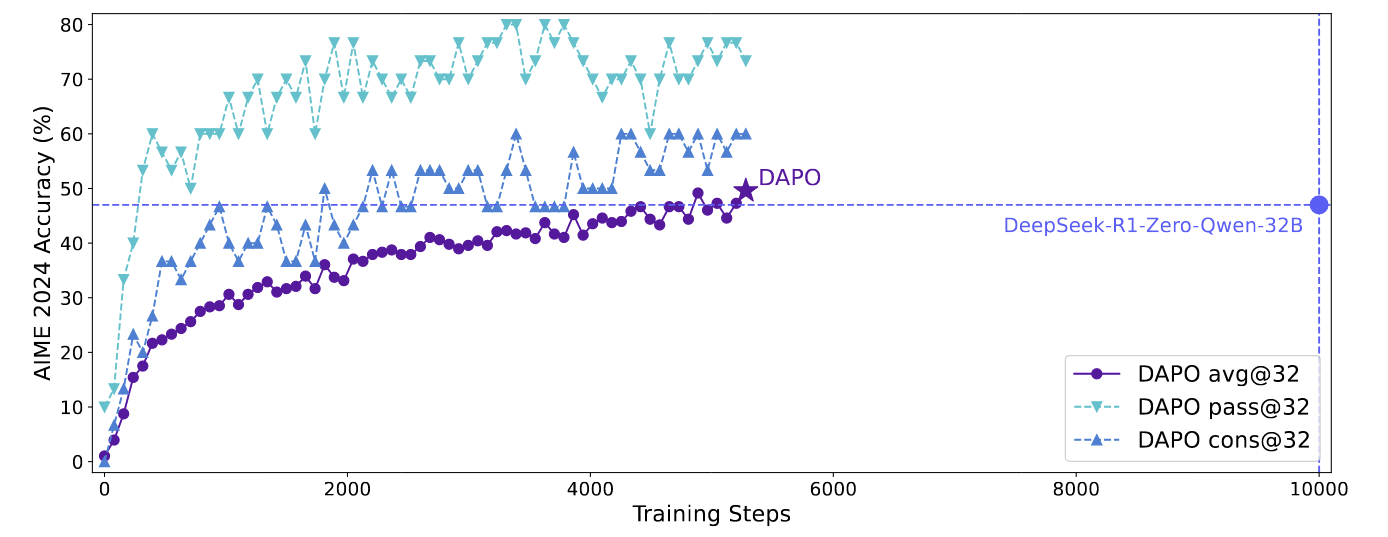
简介 后训练(post-training)已成为完整训练流程中的重要组成部分。相比于预训练,后训练需要的计算资源相对较少,但能够: 提高推理任务的准确性 使模型与社会价值观保持一致 适应用户偏好 OpenAI 的 o1 系列模型首次引入了通过增加思维链(Chain-of-Thought)推理过程长度来实现推理时间,扩展这种方法在数学、编程和科学推理等各种推理任务上取得了显著改进 研究界已探索多种方法来提高模型的推理能力:比如 基于过程的奖励模型 (Process-based Reward Models) 强化学习 (Reinforcement Learning), 代表工作:InstructGPT, 以及 搜索算法( 蒙特卡洛树搜索(Monte Carlo Tree Search)、束搜索(Beam Search))。然而,这些方法尚未达到与 OpenAI o1 系列模型相当的通用推理性能。 DeepSeek-R1-Zero 本文首先探索使用纯强化学习(RL)来提高语言模型的推理能力,重点关注: 探索 LLM 在没有任何监督数据的情况下,通过纯 RL 过程的自我进化来发展推理能力...
Generative Model
2026-01-11
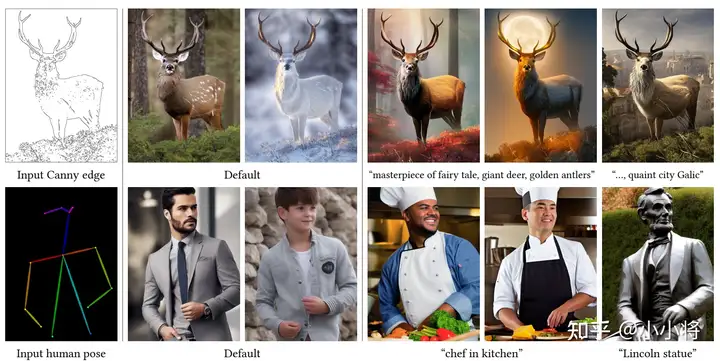
ControlNet应该算是2023年文生图领域最重要的工作,它让文生图模型Stable Diffusion实现了文本之外的可控生成,让AI绘画实现了质的飞跃。这篇文章我们将简单总结一下ControlNet技术细节。 模型设计 ControlNet的模型结构如下所示,这里是直接复制一份SD的上半部分:Encoder和中间的Middle Block。 ControlNet的输入和原始的SD一样,包括noisy latents、time embedding以及text embedding。除此之外,ControlNet还需要引入额外的condition,这个condition是和原图一样大小的图像,比如canny边界图或者人体骨架图。这里并没有像SD那样采用VAE对condition进行编码,而...
Reinforcement Learning
2026-01-11

概述与理论背景 ActorCritic方法是强化学习中的一类重要算法,它巧妙地结合了基于策略(policybased)和基于价值(valuebased)的方法。在这种结构中,"Actor"指策略更新步骤,负责根据策略执行动作;而"Critic"指价值更新步骤,负责评估Actor的表现。从另一个角度看,ActorCritic方法本质上仍是策略梯度算法,可以通过扩展策略梯度算法获得。 ActorCritic方法在强化学习中的位置非常重要,它既保留了策略梯度方法直接优化策略的优势,又利用了值函数方法的效率。这种结合使得ActorCritic方法成为解决复杂强化学习问题的强大工具。 最简单的ActorCritic算法(QAC) QAC算法通过扩展策略梯度方法得到。策略梯度方法的核心思想是通过最大化标...
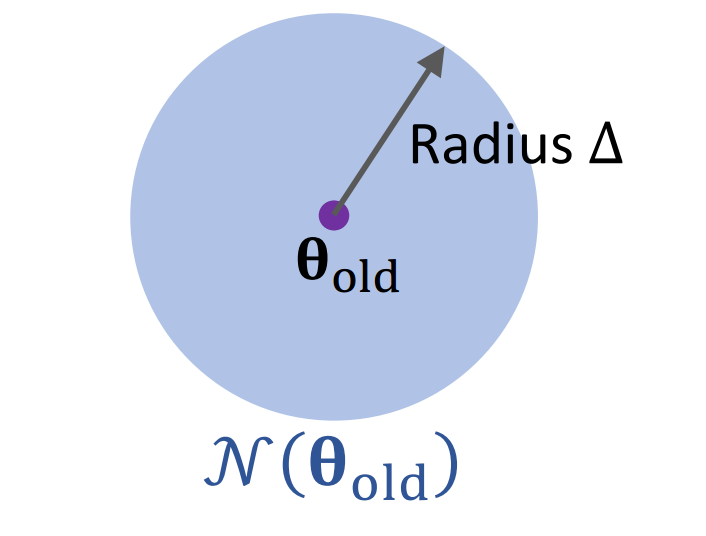
💡 引言 Trust Region Policy Optimization (TRPO) 是2015年的ICML会议上提出的一种强大的基于策略的强化学习算法。TRPO 解决了传统策略梯度方法中的一些关键问题,特别是训练不稳定和步长选择困难的问题。与传统策略梯度算法相比,TRPO 具有更高的稳健性和样本效率,能够在复杂环境中取得更好的性能。 优化基础 在深入了解 TRPO 之前,我们需要先简单回顾一些优化方法的基础知识。 梯度上升法 梯度上升法是一种迭代优化算法,用于寻找函数的局部最大值。 目标:找到使目标函数 [Math] 最大化的参数 [Math] : [公式] 梯度上升迭代过程: 1. 在当前参数 [Math] 处计算梯度: [Math] 1. 更新参数: 梯度上升法的主要问题是学习率的...
Reinforcement Learning
2026-01-11
引言 大语言模型(LLMs)在近年来取得了显著进展,展现出上下文学习、指令跟随和逐步推理等突出特性。然而,由于这些模型是在包含高质量和低质量数据的预训练语料库上训练的,它们可能会表现出编造事实、生成有偏见或有毒文本等意外行为。因此,将LLMs与人类价值观对齐变得至关重要,特别是在帮助性、诚实性和无害性(3H)方面。 基于人类反馈的强化学习(RLHF)已被验证为有效的对齐方法,但训练过程复杂且不稳定。本文深入分析了RLHF框架,特别是PPO算法的内部工作原理,并提出了PPOmax算法,以提高策略模型训练的稳定性和效果。 RLHF的基本框架 RLHF训练过程包括三个主要阶段: 1. 监督微调(SFT):模型通过模仿人类标注的对话示例来学习一般的人类对话方式, 优化模型的指令跟随能力 1. 奖励模...
Reinforcement Learning
2026-01-11
回顾 PPO [公式] 其中 (q, a) 是 数据集 [Math] 中采样的 questionanswer pair, [Math] 是重要性采样比的clip范围, [Math] 是时间步 t 的优势估计量. 给定 value function V 和 reward function R , [Math] 使用广义优势估计 (GAE) 来计算: [公式] 其中, [公式] GRPO 相比于 PPO, GRPO 去掉了value function 并以分组的方式估计优势。对于特定的问答对 (q, a), behavior policy [Math] 生成了一组 G 个 response \{o...