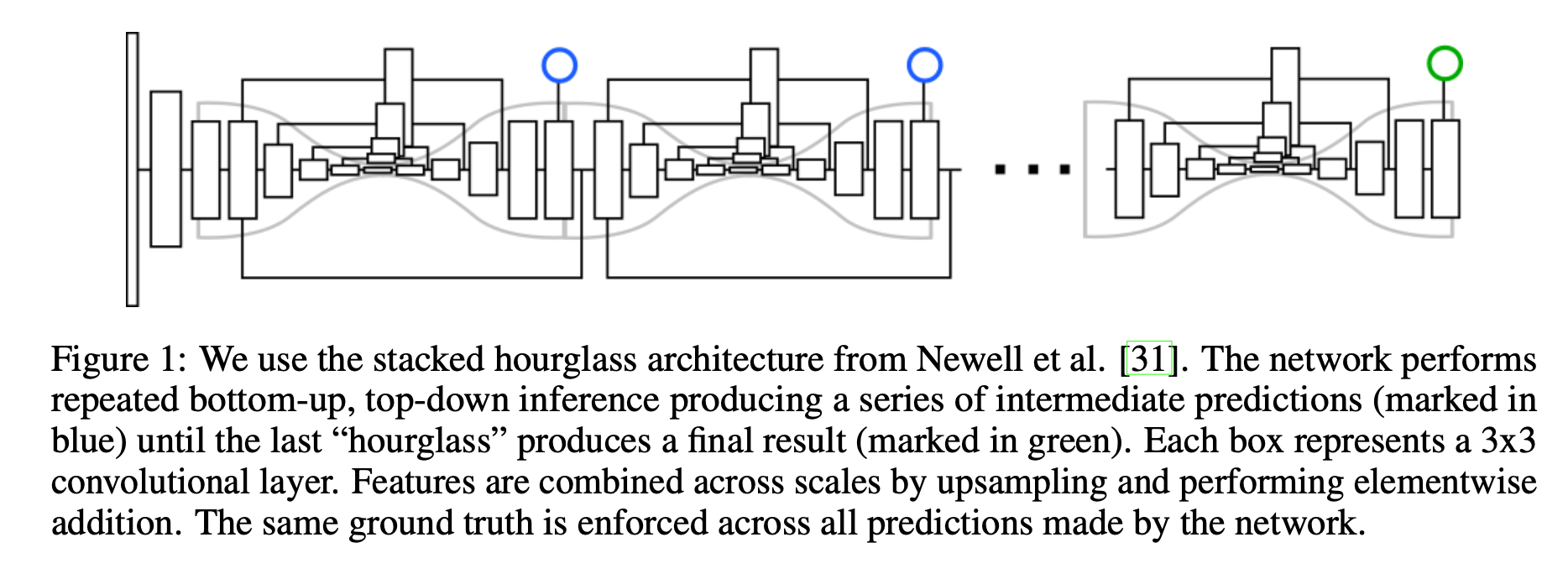
简介 作者认为许多计算机视觉的任务可以看作是检测和分组问题检测一些小的单元,然后将它们组合成更大的单元,例如,多人目标检测可以通过检测人的关节点然后再将它们进行分组(属于同一个人的关节点为一组)解决;实例分割问题可以看作是检测一些相关的像素然后将它们组合成一个目标实例。 Associative Embedding是一种表示关节检测和分组任务的输出的新方法,其基本思想是为每次检测引入一个实数,用作识别对象所属组的“tag”,换句话说,标签将每个检测与同一组中的其他检测相关联。作者使用一个损失函数使得如果相应的检测属于ground truth中的相同组则促使这一对标签具有相似的值。需要注意的是,这里标签具体的值并不重要,重要的是不同标签之间的差异。 这篇其实是源自Stacked Hourglas...
Computer Vision
2026-01-11

空洞卷积 Dilated/Atrous Convolution 或者是 Convolution with holes 从字面上就很好理解,是在标准的 convolution map 里注入空洞,以此来增加 reception field。相比原来的正常convolution,dilated convolution 多了一个 hyperparameter 称之为 dilation rate 指的是kernel的间隔数量(e.g. 正常的 convolution 是 dilatation rate 1)。 一个简单的例子 一维情况下空洞卷积的公式如下 [Formula] 不过光理解他的工作原理还是...
Computer Vision
2026-01-11
PA Pixel Accuracy(PA,像素精度):这是最简单的度量,为标记正确的像素占总像素的比例。 [公式] 图像中共有k+1(包含背景)类, p_{ii} 表示将第i类分成第 i 类的像素数量(正确分类的像素数量), p_{ij} 表示将第 i 类分成第 j 类的像素数量(所有像素数量) 因此该比值表示正确分类的像素数量占总像素数量的比例。 优点:简单 缺点:如果图像中大面积是背景,而目标较小,即使将整个图片预测为背景,也会有很高的PA得分,因此该指标不适用于评价以小目标为主的图像分割效果。 MPA Mean Pixel Accuracy(MPA,均像素精度):是PA的一种简单提升,计算每个类内被正确分类像素数的比例,之后求所有类的平均。 [公式] MIoU Mean Interse...
3D Model
2026-01-11

整体流程: [代码] 0. 数据预处理 这个步骤主要是crop四路数据,及生成后续步骤所需要的yaml文件。 1. 四路相机与双路相机标定 内参标定 [代码] 这里主要的函数就是: pts = cv2.findChessboardCorners(img, (board_width, board_height))[1] cv2.cornerSubPix(gray, pts, (12, 12), (1, 1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)) det, intr, dist, _, _ = cv2.calibrateCamera(obj_pts, img_pts, self.imgSize, None, No...
Computer Vision
2026-01-11

SPP (spatial pyramid pooling layer) SPP applies a slightly different strategy in detecting objects of different scales. It replaces the last pooling layer (after the last convolutional layer) with a spatial pyramid pooling layer. The feature maps are spatially divided into m×m bins with m, say, equals 1, 2, and 4 respectively. Then a maximum pool i...
Computer Vision
2026-01-11

原理分析 网络架构: 本文的任务是Object detection,用到的工具是Transformers,特点是Endtoend。 目标检测的任务是要去预测一系列的Bounding Box的坐标以及Label, 现代大多数检测器通过定义一些proposal,anchor或者windows,把问题构建成为一个分类和回归问题来间接地完成这个任务。文章所做的工作,就是将transformers运用到了object detection领域,取代了现在的模型需要手工设计的工作,并且取得了不错的结果。在object detection上DETR准确率和运行时间上和Faster RCNN相当;将模型 generalize 到 panoptic segmentation 任务上,DETR表现甚至还超过了其他...
Computer Vision
2026-01-11

简介 一个完整的人脸识别系统包含以下几个模块 Face Detection: 人脸检测 Face Alignment:基于人脸关键点坐标对齐到正则坐标系下坐标 Face Recognition:基于对齐人脸进行识别 人脸识别的算法流程 人脸的识别流程:面部姿态处理(处理姿态,亮度,表情,遮挡),特征提取,人脸比对。 面部处理 face processing 这部分主要对姿态(主要)、亮度、表情、遮挡进行处理,可提升FR模型性能 主要包含两种处理方式: 1. "Onetomany Augmentation": 从单个图像生成不同姿态的图像,使模型学习到姿态不变性的表示 1. "Manytoone Normalization": 从多个不同姿态的图像中恢复人脸图像的标准视图 特征提取 Backb...

论文地址: 🔖 https://arxiv.org/pdf/2107.11291 代码地址: 前言 一般来说,我们可以把姿态估计任务分成两个流派:Heatmapbased和Regressionbased。 其主要区别在于监督信息的不同,Heatmapbased方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或softargmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression...
Computer Vision
2026-01-11

一、IOU(Intersection over Union) 1. 特性(优点) IoU就是我们所说的交并比,是目标检测中最常用的指标,在anchorbased的方法中,他的作用不仅用来确定正样本和负样本,还可以用来评价输出框(predict box)和groundtruth的距离。 1. 可以说它可以反映预测检测框与真实检测框的检测效果。 1. 还有一个很好的特性就是尺度不变性,也就是对尺度不敏感(scale invariant), 在regression任务中,判断predict box和gt的距离最直接的指标就是IoU。(满足非负性;同一性;对称性;三角不等性) [代码] 2. 作为损失函数会出现的问题(缺点) 1. 如果两个框没有相交,根据定义,IoU=0,不能反映两者的距离大小(重...
Computer Vision
2026-01-11
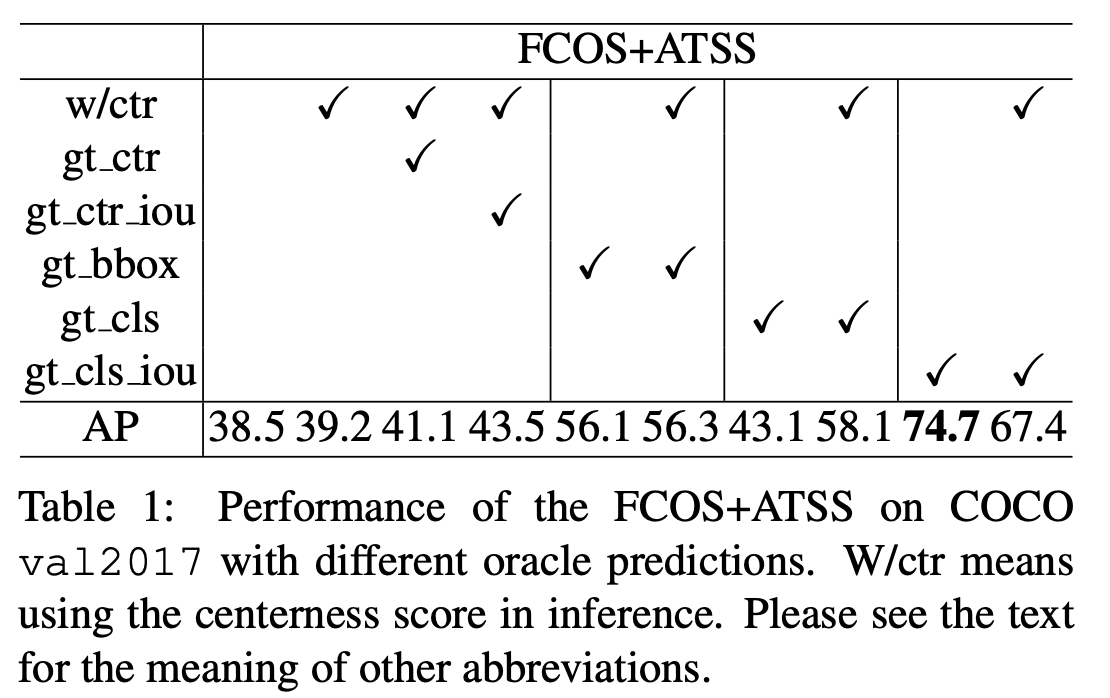
Introduction 目标检测中NMS需要依据候选检测目标的排序来进行筛选框,如果分类得分较低,但是定位框准确会导致在NMS中将该bbox框被排除掉,因此这个排序的可靠性就非常重要。之前的工作主要采用IOU分支(IOUNet)与Centerness得分(FCOS)来作为大量候选检测的排序依据。 然而,本文认为这些方法可以有效缓解分类得分和物体定位精度之间的不对齐问题。 但是,它们是次优解的,因为将两个不完善的预测相乘可能会导致排名依旧变差,作者经过试验表明,通过这种方法实现的性能上限非常有限。 此外,增加一个额外的网络分支来预测定位分数并不是一个很好的解决方案,并且会带来额外的计算负担。 基于上述分析,作者提出:不采用预测一个额外的定位精确度得分(IOUaware Centerness)...
Computer Vision
2026-01-11

💡 轻量级网络系列 Introduction Inception 在最初的版本 Inception/GoogleNet,其核心思想是利用多尺寸卷积核去观察输入数据。举个栗子,我们看某个景象由于远近不同,同一个物体的大小也会有所不同,那么不同尺度的卷积核观察的特征就会有这样的效果。于是就有了如下的网络结构图: 于是我们的网络就变胖了,通过增加网络的宽度,提高了对于不同尺度的适应程度。但这样的话,计算量有点大了。 Pointwise Conv 为了减少在上面结构的参数量并降低计算量,于是在 Inception V1 的基础版本上加上了 1x1 卷积核,这就形成了 Inception V1 的最终网络结构,如下图。 这个 1x1 卷积就是 Pointwise Convolution,简称 PW。利...