Algorithm
2026-01-11
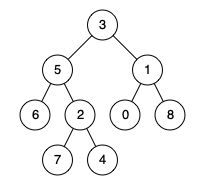
题目 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百度百科中最近公共祖先的定义为:“对于有根树 T 的两个节点 p、q,最近公共祖先表示为一个节点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以是它自己的祖先)。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1 输出:3 解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4 输出:5 解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root...
Algorithm
2026-01-11
题目 Given two sorted integer arrays nums1 and nums2, merge nums2 into nums1 as one sorted array. Note: The number of elements initialized in nums1 and nums2 are m and n respectively. You may assume that nums1 has enough space (size that is equal to m + n) to hold additional elements from nums2. Example: [代码] Constraints: 10^9 <= nums1[i], nums2[i] <...
3D Model
2026-01-11

整体流程: [代码] 0. 数据预处理 这个步骤主要是crop四路数据,及生成后续步骤所需要的yaml文件。 1. 四路相机与双路相机标定 内参标定 [代码] 这里主要的函数就是: pts = cv2.findChessboardCorners(img, (board_width, board_height))[1] cv2.cornerSubPix(gray, pts, (12, 12), (1, 1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)) det, intr, dist, _, _ = cv2.calibrateCamera(obj_pts, img_pts, self.imgSize, None, No...
Large Model
2026-01-11

这是OpenCompass的offitial ranking 榜单 🔖 https://rank.opencompass.org.cn/home MMBench 鉴于现行评测方式所存在的问题,我们重新定义了一套针对当前多模态大模型的评测流程——MMBench。其主要包含两个方面: 自上而下的能力维度设计,根据定义的能力维度构造了一个评测数据集 引入 ChatGPT,以及提出了 CircularEval 的评测方式,使得评测的结果更加稳定 Paper 链接: 🔖 https://arxiv.org/pdf/2307.06281 github: 数据集 数据集构造 主要目的是对模型的各种能力进行全方位的考察,所以我们自上而下定义了三级能力维度 (L1L3), 第一级维度(L1)包含感知与推理两项...
DFS
Large Model
2026-01-11

模型概述 KimiVL 是一个高效的开源混合专家视觉语言模型(VLM),它提供先进的多模态推理、长上下文理解和强大的代理能力,同时在语言解码器中仅激活 2.8B 参数(KimiVLA3B)。该模型在多种挑战性任务中表现出色,包括一般用途的视觉语言理解、多轮代理任务、大学水平的图像和视频理解、OCR、数学推理和多图像理解等. 模型架构 KimiVL 的架构由三个主要部分组成: MoE语言模型 Moonlight MoE language model with only 2.8B activated (16B total) parameters 视觉模型 400M nativeresolution MoonViT vision encoder. MLP Projector MoonViT: 原生...
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Large Model
2026-01-11

UITARS 简介 UITARS(User Interface Task Automation and Reasoning System)是由字节跳动(ByteDance)研发的原生 GUI 智能体模型: 输入方式:仅使用屏幕截图作为视觉输入 交互方式:执行类人操作(键盘输入、鼠标点击、拖拽等) 模型特性:端到端的原生智能体模型,无需复杂的中间件或框架 传统 GUI 智能体的开发往往依赖于文本信息,例如 HTML 结构和可访问性树。虽然这些方法取得了一些进展,但它们也存在一些局限性: 平台不一致性:不同平台的 GUI 结构差异很大,导致智能体难以跨平台通用。 信息冗余:文本信息往往过于冗长,增加了模型的处理负担。 访问限制:获取系统底层的文本信息通常需要较高的权限,限制了应用的范围。 模块化...
Computer Vision
2026-01-11

简介 一个完整的人脸识别系统包含以下几个模块 Face Detection: 人脸检测 Face Alignment:基于人脸关键点坐标对齐到正则坐标系下坐标 Face Recognition:基于对齐人脸进行识别 人脸识别的算法流程 人脸的识别流程:面部姿态处理(处理姿态,亮度,表情,遮挡),特征提取,人脸比对。 面部处理 face processing 这部分主要对姿态(主要)、亮度、表情、遮挡进行处理,可提升FR模型性能 主要包含两种处理方式: 1. "Onetomany Augmentation": 从单个图像生成不同姿态的图像,使模型学习到姿态不变性的表示 1. "Manytoone Normalization": 从多个不同姿态的图像中恢复人脸图像的标准视图 特征提取 Backb...

论文地址: 🔖 https://arxiv.org/pdf/2107.11291 代码地址: 前言 一般来说,我们可以把姿态估计任务分成两个流派:Heatmapbased和Regressionbased。 其主要区别在于监督信息的不同,Heatmapbased方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或softargmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression...
Large Model
2026-01-11
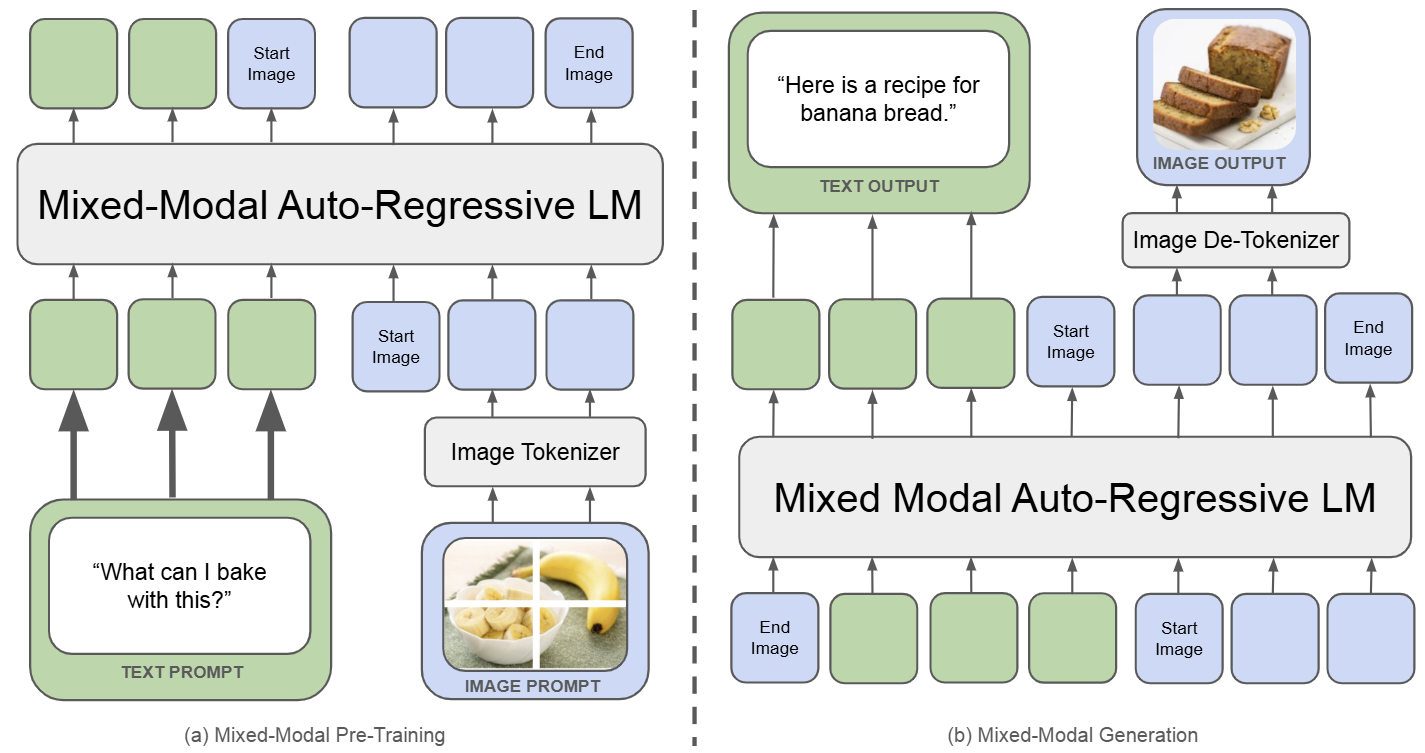
Chameleon:生成理解统一模型的开山之作 🔖 https://arxiv.org/pdf/2405.09818 Chameleon 是一个既能做图像理解,又可以做图像或者文本生成任务的,从头训练的 Transformer 模型。完整记录了为实现 mixedmodal 模型的架构设计,稳定训练方法,对齐的配方。并在一系列全面的任务上进行评估:有纯文本任务,也有图像文本任务 (视觉问答、图像字幕),也有图像生成任务,还有混合模态的生产任务。 如下图所示,Chameleon 将所有模态数据 (图像、文本和代码) 都表示为离散 token,并使用统一的 Transformer 架构。训练数据是交错混合模态数据 ∼10T token,以端到端的方式从头开始训练。文本 token 用绿色表示,图像...