Algorithm
2026-01-11
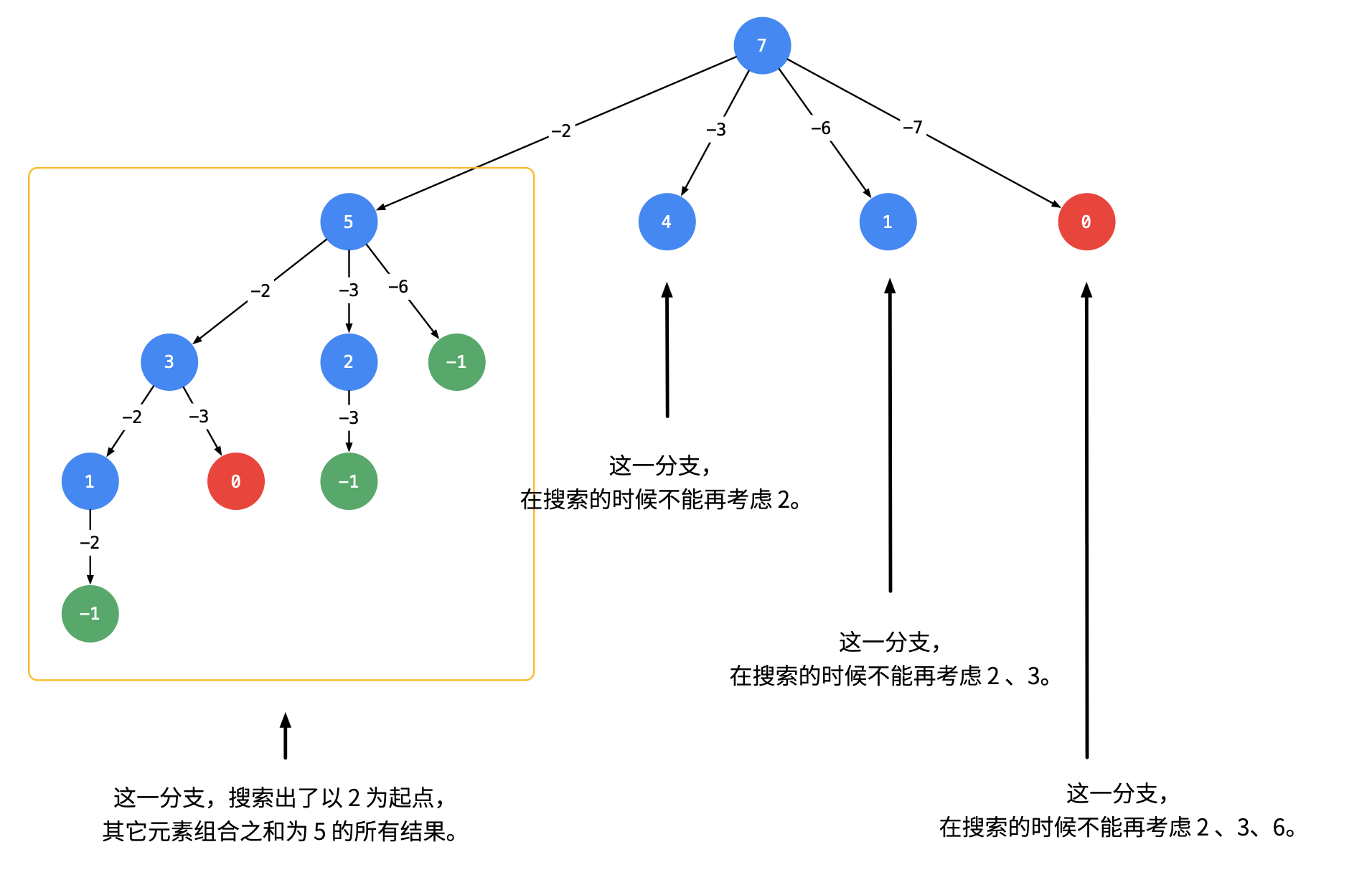
1. 可以重复选取 给定一个无重复元素的数组 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的数字可以无限制重复被选取。 画出树状搜索图如下, 为了去除重复的情况, 我们需要按照某种顺序搜索,具体做法是:每一次搜索的时候,设置下一轮搜索的起点 [代码] 2. 不能被重复选取 与上面的区别在于 1. index每次不要重复搜索,而是去寻找下一个 1. 排除重复的元素 [代码]