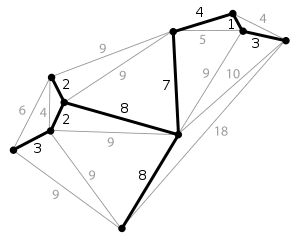
简介 生成树(spanning tree) 在图论中,无向图 \(G=(V,E)\) 的生成树(spanning tree)是具有 \(G\) 的全部顶点,但边数最少的联通子图。假设 \(G\) 中一共有 \(n\) 个顶点,一颗生成树满足下列条件 \(n\) 个顶点; \(n-1\) 条边; \(n\) 个顶点联通; 一个图的生成树可能有多个。 最小生成树(minimum spanning tree, MST)/最小生成森林 :联通加权无向图中边缘权重加和最小的生成树。给定无向图 \(G=(V,E)\) , \((u,v)\) 代表顶点 \(u\) 与顶点 \(v\) 的边, \(w(u,v)\) 代表此边的权重,若存在生成树T使得: \[w(T) = \sum_{(u,v)\in T}w(w,v)\] 最小,则 \(T\) 为 \(G\) 的最小生成树。对于非连通无向图来说,它的每一 连通分量 同样有最小生成树,它们的并被称为 最小生成森林 。最小生成树除了继承生成树的性质之外,还存在下面两个特点: 当图的每一条边的权值都相同时,该图的所有生成树都是最小生成树;...
3D Model
2026-02-12

深度相机 “工欲善其事必先利其器‘’我们先从能够获取RGBD数据的相机开始谈起。首先我们来看一看其分类。 根据其工作原理主要分为三类: 1.双目方案 基于双目立体视觉的深度相机类似人类的双眼,和基于TOF、结构光原理的深度相机不同,它不对外主动投射光源,完全依靠拍摄的两张图片(彩色RGB或者灰度图)来计算深度,因此有时候也被称为被动双目深度相机。比较知名的产品有STEROLABS 推出的 ZED 2K Stereo Camera和Point Grey 公司推出的 BumbleBee。 双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中, 双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像 ,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。 双目视觉有的时候我们也会把它称为体视,是人类利用双眼获取环境三维信息的主要途径。从目前来看,随着机器视觉理论的发展,双目立体视觉在机器视觉研究中发回来看了越来越重要的作用 为什么非得用双目相机才能得到深度?...
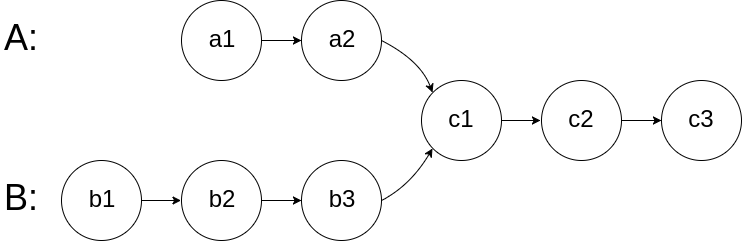
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...
Deep Learning
2026-01-22

文章从连续情形出发开始介绍重参数,主要的例子是正态分布的重参数;然后引入离散分布的重参数,这就涉及到了Gumbel Softmax,包括Gumbel Softmax的一些证明和讨论;最后再讲讲重参数背后的一些故事,这主要跟梯度估计有关。 基本概念 重参数(Reparameterization) 实际上是处理如下期望形式的目标函数的一种技巧: \[L_{\theta}=\mathbb{E}_{z\sim p_{\theta}(z)}[f(z)]\tag{1}\] 这样的目标在VAE中会出现,在文本GAN也会出现,在强化学习中也会出现( \(f(z)\) 对应于奖励函数),所以深究下去,我们会经常碰到这样的目标函数。取决于 \(z\) 的连续性,它对应不同的形式: \[\int p_{\theta}(z) f(z)dz\,\,\,\text{(连续情形)}\qquad\qquad \sum_{z} p_{\theta}(z) f(z)\,\,\,\text{(离散情形)}\tag{2}\] 当然,离散情况下我们更喜欢将记号 \(z\) 换成 \(y\) 或者 \(c\) 。 为了最小化...