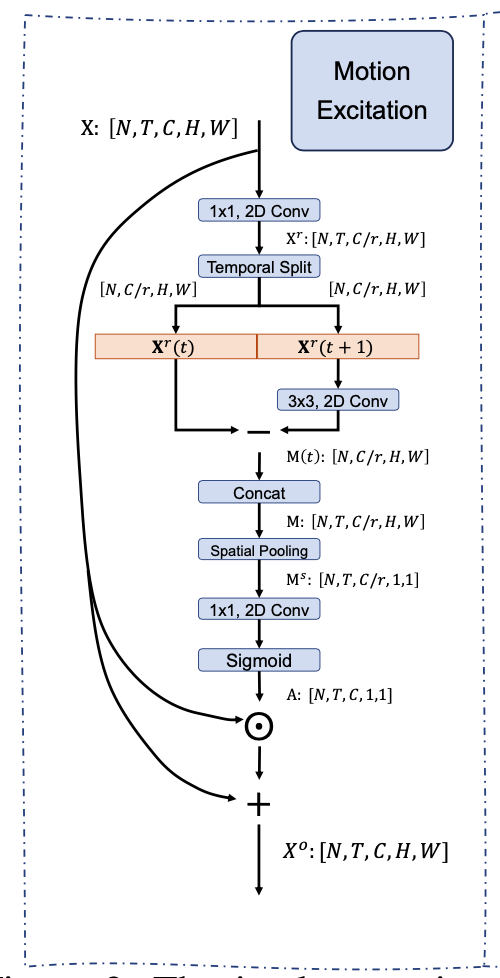
Motivation Motion feature 学习过程中存在的问题: 利用 optical flow 存储和计算的开销太大 现阶段的网络设计,spatiotemporal 建模 和Motion feature 建模分离 比如STM 直接 Add spatio temporal feature 和 motion encoding feature TEA 的 ME 则利用了 Motion feature 做 channeI attention 过去的建模都 focus 在 framelevel motion,更好的建模方式 featurelevel motion 长时建模存在的问题: 单帧过backbone,最后的feature 进行 temporal max/average poolin...
3D Model
2026-01-11

研究动机 目前 3Dbased 的方法在大规模的 scenebased 的数据集(如kinetics)上相对于2D的方法取得了更好的效果,但是3Dbased也存在一些明显的问题: 3Dbased 的网络参数量大,计算开销大,训练的 scheduler 更长,inference latency 明显慢于 2Dbased 的方法。 3D卷积其实并不能很好得学到时序上信息的变化,而且3D卷积学出来的时序Kernel的weight的分布基本一致,更多的还是对时序上的信息做一种 smooth aggregation。这一点在之前的工作TANet 中有比较详细的讨论。也基于此,3Dbased 的网络在SomethingSomething这种对时序信息比较敏感的video数据集上并不能取得很好的效果( 得...
Computer Vision
2026-01-11

空洞卷积 Dilated/Atrous Convolution 或者是 Convolution with holes 从字面上就很好理解,是在标准的 convolution map 里注入空洞,以此来增加 reception field。相比原来的正常convolution,dilated convolution 多了一个 hyperparameter 称之为 dilation rate 指的是kernel的间隔数量(e.g. 正常的 convolution 是 dilatation rate 1)。 一个简单的例子 一维情况下空洞卷积的公式如下 [Formula] 不过光理解他的工作原理还是...
3D Model
2026-01-11

Classification,Detection Classification:给定预先裁剪好的视频片段,预测其所属的行为类别 Detection:视频是未经过裁剪的,需要先进行人的检测where和行为定位(分析行为的始末时间)when,再进行行为的分类what。 通常所说的行为识别更偏向于对时域预先分割好的序列进行行为动作的分类,即 Trimmed Video Action Classification。 TwoStream Twostream convolutional networks 简介 TwoStream CNN网络顾名思义分为两个部分, 1. 空间流处理RGB图像,得到形状信息; 1. 时间流/光流处理光流图像,得到运动信息。 两个流最后经过softmax后,做分类分数的融合,...
Computer Vision
2026-01-11
PA Pixel Accuracy(PA,像素精度):这是最简单的度量,为标记正确的像素占总像素的比例。 [公式] 图像中共有k+1(包含背景)类, p_{ii} 表示将第i类分成第 i 类的像素数量(正确分类的像素数量), p_{ij} 表示将第 i 类分成第 j 类的像素数量(所有像素数量) 因此该比值表示正确分类的像素数量占总像素数量的比例。 优点:简单 缺点:如果图像中大面积是背景,而目标较小,即使将整个图片预测为背景,也会有很高的PA得分,因此该指标不适用于评价以小目标为主的图像分割效果。 MPA Mean Pixel Accuracy(MPA,均像素精度):是PA的一种简单提升,计算每个类内被正确分类像素数的比例,之后求所有类的平均。 [公式] MIoU Mean Interse...
Large Model
2026-01-11

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路,丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存...
Computer Vision
2026-01-11

SPP (spatial pyramid pooling layer) SPP applies a slightly different strategy in detecting objects of different scales. It replaces the last pooling layer (after the last convolutional layer) with a spatial pyramid pooling layer. The feature maps are spatially divided into m×m bins with m, say, equals 1, 2, and 4 respectively. Then a maximum pool i...
NLP
2026-01-11

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了Transformer。Transformer 是Google Brain 2017的提出的一篇工...
Computer Vision
2026-01-11

原理分析 网络架构: 本文的任务是Object detection,用到的工具是Transformers,特点是Endtoend。 目标检测的任务是要去预测一系列的Bounding Box的坐标以及Label, 现代大多数检测器通过定义一些proposal,anchor或者windows,把问题构建成为一个分类和回归问题来间接地完成这个任务。文章所做的工作,就是将transformers运用到了object detection领域,取代了现在的模型需要手工设计的工作,并且取得了不错的结果。在object detection上DETR准确率和运行时间上和Faster RCNN相当;将模型 generalize 到 panoptic segmentation 任务上,DETR表现甚至还超过了其他...
Computer Vision
2026-01-11

简介 一个完整的人脸识别系统包含以下几个模块 Face Detection: 人脸检测 Face Alignment:基于人脸关键点坐标对齐到正则坐标系下坐标 Face Recognition:基于对齐人脸进行识别 人脸识别的算法流程 人脸的识别流程:面部姿态处理(处理姿态,亮度,表情,遮挡),特征提取,人脸比对。 面部处理 face processing 这部分主要对姿态(主要)、亮度、表情、遮挡进行处理,可提升FR模型性能 主要包含两种处理方式: 1. "Onetomany Augmentation": 从单个图像生成不同姿态的图像,使模型学习到姿态不变性的表示 1. "Manytoone Normalization": 从多个不同姿态的图像中恢复人脸图像的标准视图 特征提取 Backb...

论文地址: 🔖 https://arxiv.org/pdf/2107.11291 代码地址: 前言 一般来说,我们可以把姿态估计任务分成两个流派:Heatmapbased和Regressionbased。 其主要区别在于监督信息的不同,Heatmapbased方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或softargmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression...
NLP
2026-01-11

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4,不算太老,而SSM最新最火的变体大概是Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mam...