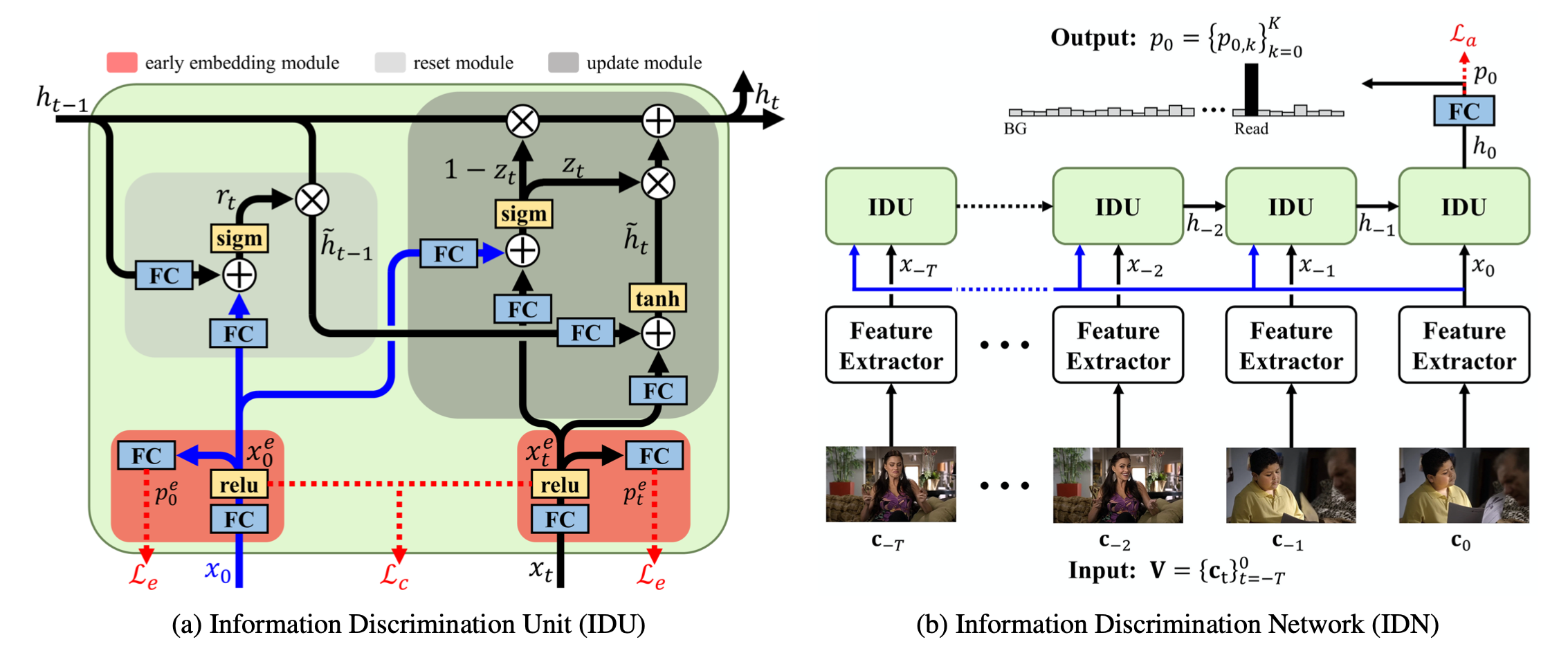
简介 这篇文章主要的动机是,之前的RNN,LSTM,GRU这样的循环结构中,循环单元累计历史输入,但忽视了其与当前动作的联系,所以不能得到一个有效的判别性的表示。 Specifically, the recurrent unit accumulates the input information without explicitly considering its relevance to the current action, and thus the learned representation would be less discriminative. 所以, 这篇文章就是在探索是否可以学习一个判别性较强的表示区分相关和不相关的信息以检测当前要动作。 how RNNs can lear...
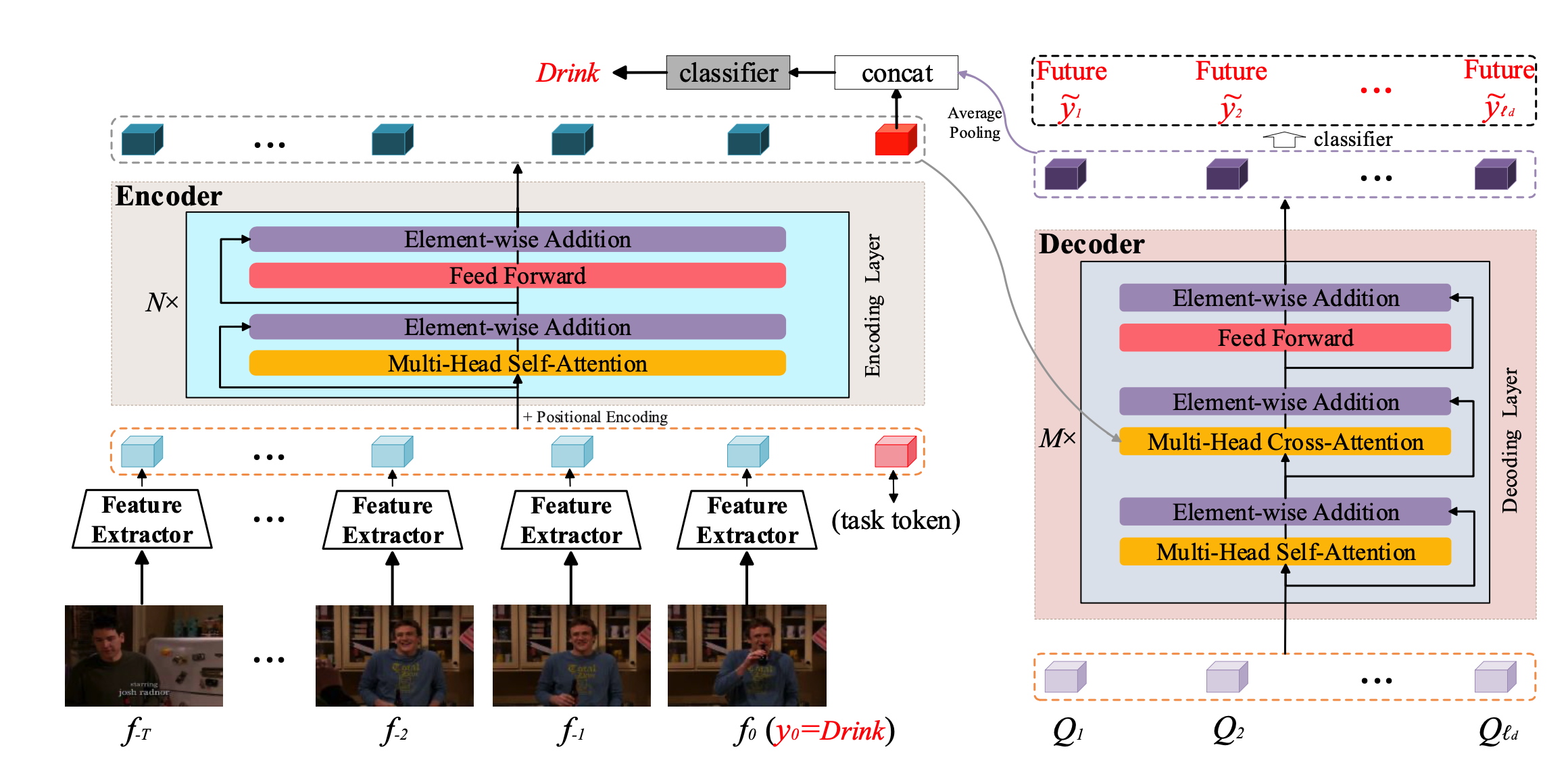
简介 之前的很多方法都是用RNN的结构去构建时序上的依赖关系,但是RNN的结构的缺点是不能并行操作,且存在梯度消失的现象。所以本文就是将之前的RNN的结构改为Transfomer的形式。延续了之前TRN的整个网络的框架,也是结合了对未来帧的预测与历史帧的表示相结合来对当前的动作进行预测。 方法 整个网络框架如上图所示, Encoder就是利用transfomer对longrange的历史和目前帧进行特征表示,其中要说明的一个点就是,这里的特征空间包含T个历史特征,当前窗口的特征以及一个task token,这个task token的作用可以从下图看出来 这幅图对比的是输入进classifier的特征与网络输入的特征的相似性,可以看出w/o task token 对应的是当前t=0时刻的特征,...
3D Model
2026-01-11
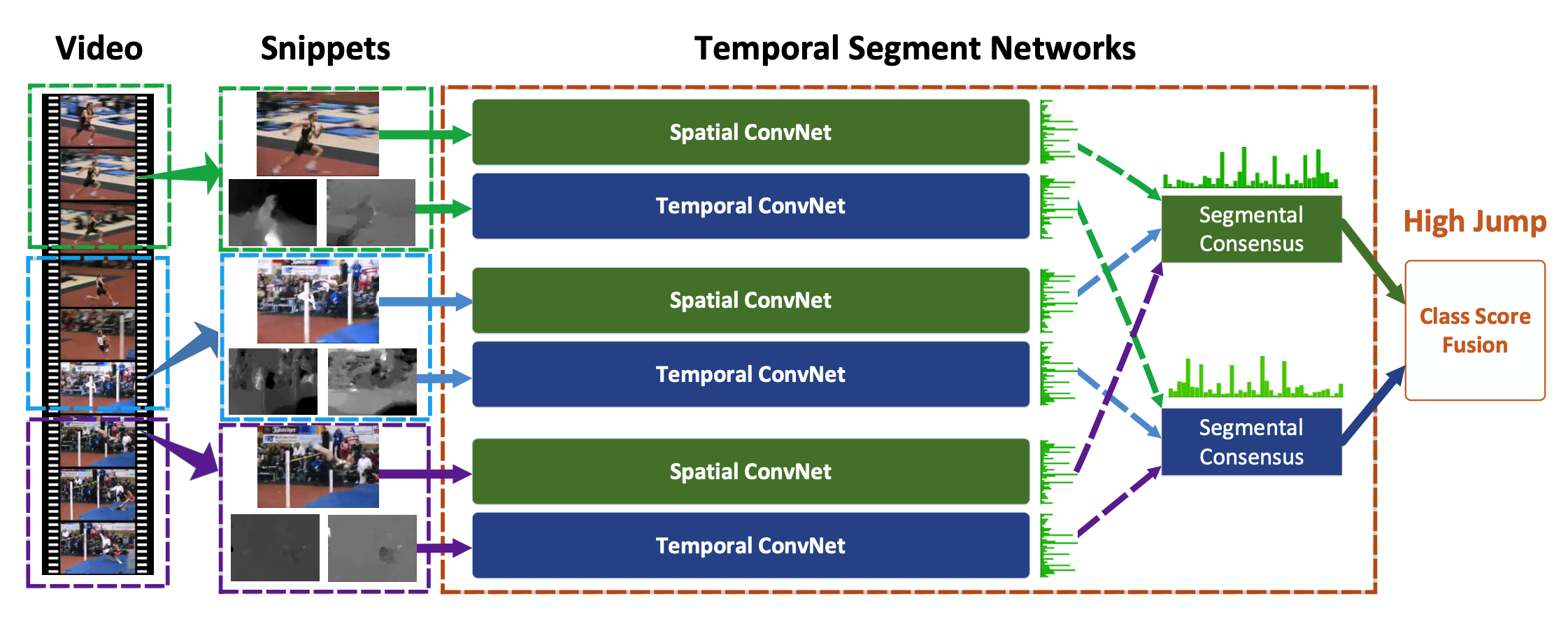
简介 这篇ECCV2016的文章主要提出TSN(temporal segment network)结构用来做视频的动作识别。TSN可以看做是双流(two stream)系列的改进,在此基础上,文章要解决两个问题:1、是longrange视频的行为判断问题(有些视频的动作时间较长)。2、是解决数据少的问题,数据量少会使得一些深层的网络难以应用到视频数据中,因为过拟合会比较严重。 针对第一个问题,首先,为什么目前的双流结构网络难以学习到视频的长时间信息?因为其针对的主要是单帧图像或者短时间内的一堆帧图像数据,但这对于时间跨度较长的视频动作检测而言是不够的。因此采用更加密集的图像帧采样方式来获取视频的长时间信息是比较常用的方法,但是这样做会增加不少时间成本,同时作者发现视频的连续帧之间存在冗余,因...
3D Model
2026-01-11
Related Work: 大概过一下之前的几个重要工作(也是本文性能对比的主要几个stateoftheart): 1. TSN:视频动作/行为识别的基本框架,将视频帧下采样(分成K个Segment,各取一帧)后接2D CNN对各帧进行处理+fusion 1. TRN:对视频下采样出来的 frames 的deep feature,使用 MLP 来融合,建立帧间temporal context 联系。最后将多级(不同采样率)出来的结果进行再一步融合,更好表征shortterm 和 longterm 关系。 1. ECO系列: 1. NL I3D+GCN:使用 nonlocal I3D来捕获longrange时空特征,使用 spacetime region graphs 来获取物体区域间的关联及...
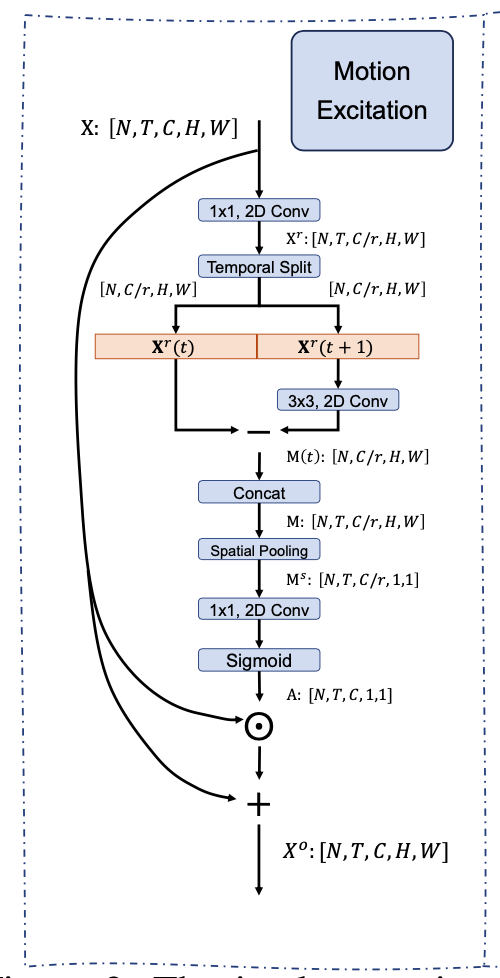
Motivation Motion feature 学习过程中存在的问题: 利用 optical flow 存储和计算的开销太大 现阶段的网络设计,spatiotemporal 建模 和Motion feature 建模分离 比如STM 直接 Add spatio temporal feature 和 motion encoding feature TEA 的 ME 则利用了 Motion feature 做 channeI attention 过去的建模都 focus 在 framelevel motion,更好的建模方式 featurelevel motion 长时建模存在的问题: 单帧过backbone,最后的feature 进行 temporal max/average poolin...
3D Model
2026-01-11

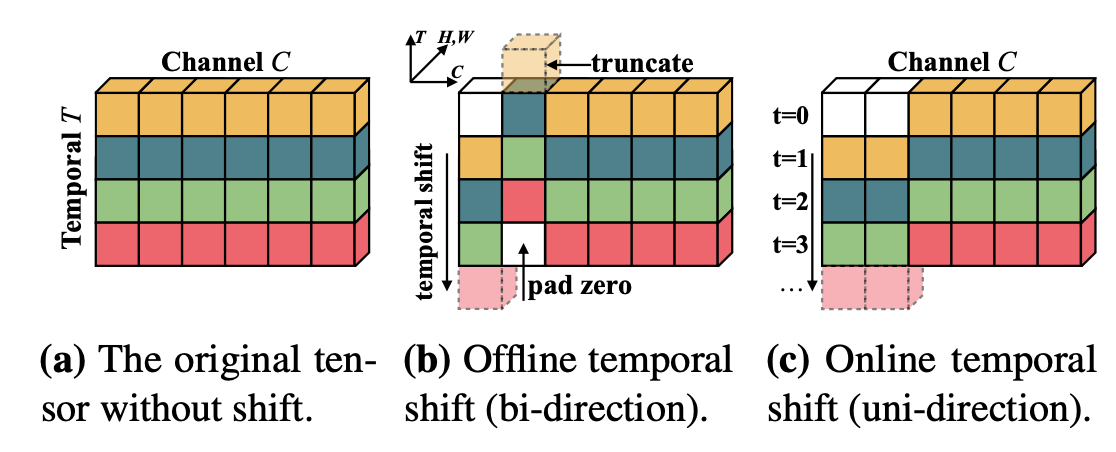
研究动机 目前 3Dbased 的方法在大规模的 scenebased 的数据集(如kinetics)上相对于2D的方法取得了更好的效果,但是3Dbased也存在一些明显的问题: 3Dbased 的网络参数量大,计算开销大,训练的 scheduler 更长,inference latency 明显慢于 2Dbased 的方法。 3D卷积其实并不能很好得学到时序上信息的变化,而且3D卷积学出来的时序Kernel的weight的分布基本一致,更多的还是对时序上的信息做一种 smooth aggregation。这一点在之前的工作TANet 中有比较详细的讨论。也基于此,3Dbased 的网络在SomethingSomething这种对时序信息比较敏感的video数据集上并不能取得很好的效果( 得...
Computer Vision
2026-01-11

空洞卷积 Dilated/Atrous Convolution 或者是 Convolution with holes 从字面上就很好理解,是在标准的 convolution map 里注入空洞,以此来增加 reception field。相比原来的正常convolution,dilated convolution 多了一个 hyperparameter 称之为 dilation rate 指的是kernel的间隔数量(e.g. 正常的 convolution 是 dilatation rate 1)。 一个简单的例子 一维情况下空洞卷积的公式如下 [Formula] 不过光理解他的工作原理还是...
3D Model
2026-01-11

Classification,Detection Classification:给定预先裁剪好的视频片段,预测其所属的行为类别 Detection:视频是未经过裁剪的,需要先进行人的检测where和行为定位(分析行为的始末时间)when,再进行行为的分类what。 通常所说的行为识别更偏向于对时域预先分割好的序列进行行为动作的分类,即 Trimmed Video Action Classification。 TwoStream Twostream convolutional networks 简介 TwoStream CNN网络顾名思义分为两个部分, 1. 空间流处理RGB图像,得到形状信息; 1. 时间流/光流处理光流图像,得到运动信息。 两个流最后经过softmax后,做分类分数的融合,...
Computer Vision
2026-01-11
PA Pixel Accuracy(PA,像素精度):这是最简单的度量,为标记正确的像素占总像素的比例。 [公式] 图像中共有k+1(包含背景)类, p_{ii} 表示将第i类分成第 i 类的像素数量(正确分类的像素数量), p_{ij} 表示将第 i 类分成第 j 类的像素数量(所有像素数量) 因此该比值表示正确分类的像素数量占总像素数量的比例。 优点:简单 缺点:如果图像中大面积是背景,而目标较小,即使将整个图片预测为背景,也会有很高的PA得分,因此该指标不适用于评价以小目标为主的图像分割效果。 MPA Mean Pixel Accuracy(MPA,均像素精度):是PA的一种简单提升,计算每个类内被正确分类像素数的比例,之后求所有类的平均。 [公式] MIoU Mean Interse...
Computer Vision
2026-01-11

SPP (spatial pyramid pooling layer) SPP applies a slightly different strategy in detecting objects of different scales. It replaces the last pooling layer (after the last convolutional layer) with a spatial pyramid pooling layer. The feature maps are spatially divided into m×m bins with m, say, equals 1, 2, and 4 respectively. Then a maximum pool i...
Computer Vision
2026-01-11

原理分析 网络架构: 本文的任务是Object detection,用到的工具是Transformers,特点是Endtoend。 目标检测的任务是要去预测一系列的Bounding Box的坐标以及Label, 现代大多数检测器通过定义一些proposal,anchor或者windows,把问题构建成为一个分类和回归问题来间接地完成这个任务。文章所做的工作,就是将transformers运用到了object detection领域,取代了现在的模型需要手工设计的工作,并且取得了不错的结果。在object detection上DETR准确率和运行时间上和Faster RCNN相当;将模型 generalize 到 panoptic segmentation 任务上,DETR表现甚至还超过了其他...
Computer Vision
2026-01-11

简介 一个完整的人脸识别系统包含以下几个模块 Face Detection: 人脸检测 Face Alignment:基于人脸关键点坐标对齐到正则坐标系下坐标 Face Recognition:基于对齐人脸进行识别 人脸识别的算法流程 人脸的识别流程:面部姿态处理(处理姿态,亮度,表情,遮挡),特征提取,人脸比对。 面部处理 face processing 这部分主要对姿态(主要)、亮度、表情、遮挡进行处理,可提升FR模型性能 主要包含两种处理方式: 1. "Onetomany Augmentation": 从单个图像生成不同姿态的图像,使模型学习到姿态不变性的表示 1. "Manytoone Normalization": 从多个不同姿态的图像中恢复人脸图像的标准视图 特征提取 Backb...