基本概念 方向导数:是一个数;反映的是 \(f(x,y)\) 在 \(P_0\) 点沿方向 \(v\) 的变化率。 偏导数:是多个数(每元有一个);是指多元函数沿坐标轴方向的 方向导数 ,因此二元函数就有两个偏导数。 偏导函数:是一个函数;是一个关于点的偏导数的函数。 梯度:是一个向量;每个元素为函数对一元变量的偏导数;它既有大小(其大小为最大方向导数),也有方向。 方向导数 反映的是 \(f(x,y)\) 在 \(P_0\) 点沿方向 \(v\) 的变化率。 例子如下: 题目 设二元函数 \( f(x, y) = x^2 + y^2\) ,分别计算此函数在点 \((1, 2)\) 沿方向 \(w=\{3, -4\}\) 与方向 \(u=\{1, 0\}\) 的方向导数。 解: 由于 \(w\) 不是单位向量,因此首先应对其进行单位化: \[v = w^0 = \frac{w}{|w|} = \left\{ \frac{3}{5}, -\frac{4}{5} \right\}\] 计算函数增量: \[\begin{aligned}
\therefore f(x_0 + tv_1,...
问题表示 有很多概率问题,尤其是独立重复实验问题,如果用生成函数的方法来做,会显得特别方便。本文要讲的“随机游走”问题便是其中一例,它又被形象地叫做“醉汉问题”,其本质上是一个二项分布,但是由于取了极限,出现了很多新的性质和应用。我们先考虑如下问题: 考虑实数轴上的一个粒子,在 \(t=0\) 时刻它位于原点,每过一秒,它要不向前移动一格( \(+1\) ),要不就向后移动一格( \(-1\) ),问 \(n\) 秒后它所处位置的概率分布。 不难发现,这个问题跟二项分布是雷同的。如果把这个粒子形象比喻成一个“喝醉酒的人”,那么上面的走法就类似于一个完全不省人事的醉汉走路问题了。(当然,醉汉是在三维空间走路的,这里简单起见,只描述了一维的。)这是一个独立重复实验,每秒的行走可用函数描述为 \(\frac{1}{2}(z+z^{-1})\) ,于是 \(n\) 秒后的运动分布情况可以用 \[\frac{1}{2^n}(z+z^{-1})^n\] 来描述, \(z^i(i=-n,-n+1,\dots,n-1,n)\) 的系数表示粒子位于 \(i\) 的概率。 💡...
Math
2026-04-15

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 \(X\) ,其取值来自有限集合 \(\mathcal{X}\) 。我们的目标是估计 \(E[X]\) 。假设我们有一个独立同分布的样本序列 \(\{x_i\}_{i=1}^n\) ,那么 \(X\) 的期望值可以近似为: \[E[X] \approx \bar{x} = \frac{1}{n}\sum_{i=1}^n x_i\] 非增量方法与增量方法 非增量方法 :先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法 :定义 \[w_{k+1} = \frac{1}{k}\sum_{i=1}^k x_i, k = 1, 2, ...\] 可以推导出递归公式: \[{w}_{k + 1} =...
Generative Model
2026-04-15

简介 如果以概率的视角看待世界的生成模型。 在这样的世界观中,我们可以将任何类型的观察数据(例如 \(D\) )视为来自底层分布(例如 \( p_{data}\) )的有限样本集。 任何生成模型的目标都是在访问数据集 \(D\) 的情况下近似该数据分布。 如果我们能够学习到一个好的生成模型,我们可以将学习到的模型用于下游推理。 我们主要对数据分布的参数近似感兴趣,在一组有限的参数中,它总结了关于数据集 \(D\) 的所有信息。 与非参数模型相比,参数模型在处理大型数据集时能够更有效地扩展,但受限于可以表示的分布族。 在参数的设置中,我们可以将学习生成模型的任务视为在模型分布族中挑选参数,以最小化模型分布和数据分布之间的距离。 如上图,给定一个狗的图像数据集,我们的目标是学习模型族 \(M\) 中生成模型 θ 的参数,使得模型分布 \(p_θ\) 接近 \(p_{data}\) 上的数据分布。 在数学上,我们可以将我们的目标指定为以下优化问题: \[\mathop{min}\limits_{\theta\in M}d(p_\theta,p_{data})\] 其中, \(d()\)...
Computer Vision
2026-04-15

上图是Yolo v4中,对各种detector部件的总结:包含Input、backbone、neck、head、... Backbone 轻量级网络系列 Neck 例如:SPP 、 ASPP 、 RFB、 SAM 用来增加感受野 特征融合,主要是指不同输出层直接的特征融合,主要包括FPN、PAN、SFAM、ASFF和BiFPN。 结构 Path Aggregation Blcok Deformable Convolution系列 One stage Yolo系列 Focal Loss & RetinaNet Two-Stage Faster R-CNN R-FCN Anchor Free Anchor-Free Transformer DETR Problems 目标检测中的多尺度问题 NMS及其改进 IoU loss系列 目标检测中mAP计算

论文地址: https://arxiv.org/pdf/2107.11291 代码地址: https://github.com/Jeff-sjtu/res-loglikelihood-regression 前言 一般来说, 我们可以把姿态估计任务分成两个流派:Heatmap-based和Regression-based。 其主要区别在于监督信息的不同,Heatmap-based方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或soft-argmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression-based方法则非常简单粗暴,直接监督模型学习坐标值,计算坐标值的L1或L2...
NLP
2026-04-15
概述 HiPPO(High-order Polynomial Projection Operators)是目前大热的structured state space model (S4)及其后续工作的backbone. State space mode主要是控制学科里的内容,最近被引入深度学习领域来解决长距离依赖问题。长距离依赖建模的核心问题是如何通过有限的memory来尽可能记住之前所有的历史信息。当前的主流序列建模模型(即Transformer和RNN) 存在着普遍的遗忘问题 fixed-size context windows: Transformer的window size通常是有限的,一般来说quadratic的attention最多建模到大约10k的token就到计算极限了 vanishing gradient: RNN通过hidden state来存储历史信息,理论上能记住之前所有内容,但实际上的effective memory大概是<1k个token的level,可能的原因是gradient vanishing HiPPO 通过数学方法分析来得到closed-form...
Computer Vision
2026-04-15

Segment Anything Segment Anything(SA)项目:一个用于图像分割的新任务、新模型和新数据集 通过FM(基础模型)+prompt解决了CV中难度较大的分割任务,给计算机视觉实现基础模型+提示学习+指令学习提供了一种思路 关键:加大模型容量(构造海量的训练数据,或者构造合适的自监督任务来预训练) Segment Anything Task SAM的一部分灵感是来源于NLP中的基座模型(Foundation Model),Foundation Model是OpenAI提出的一个概念,它指的是在超大量数据集上预训练过的大模型(如GPT系列、BERT),这些模型具有非常强大的 zero-shot 和 few-shot能力,结合prompt engineering和fine tuning等技术可以将基座模型应用在各种下游任务中并实现惊人的效果。 SAM就是想构建一个这样的图像分割基座模型,即使是一个未见过的数据集,模型也能自动或半自动(基于prompt)地完成下游的分割任务。为了实现这个目标,SAM定义了一种可提示化的分割任务(promptable...
Computer Vision
2026-04-15

概述 在计算机视觉领域(CV),对视觉特征的理解CNN是长期处于主导地位的。而在NLP领域,Transformer框架的巨大成功,也激发了不少研究者探索将Transformer用于计算机视觉任务。ViT(Vision Transformer)的出现标志着在CV领域Transformer架构迈出了重要的一步。尤其在当前结合LLM的多模态探索上(MM-LLM),都是以LLM大语言模型为骨干架构的模型,多种模态的信息需要先做token化处理,再输入到LLM模型。ViT天然具有序列化特征的建模能力,自然在MM-LLM探索中大放异彩~ ViT在多模态模型中的角色类似于自然语言建模中的Tokenizer组件,对图像进行视觉特征编码,产出图像的序列特征。只不过ViT的编码过程本身也是采用了Transformer的模型结构。 本文主要结合几篇paper和源码讲讲ViT和针对ViT的一些优化方法~ ViT(Vision Transformer)...
Large Model
2026-04-15
总览 由于是“图文多模态”,还是要从“图”和“文”的表征方法讲起,然后讲清楚图文表征的融合方法。这里只讲两件事情: 视觉表征 :分为两个部分问题,一是如何合理建模视觉输入特征,二是如何通过预训练手段进行充分学习表征,这两点是基于视觉完成具体算法任务的基础; 视觉与自然语言的对齐(Visul Language Alignment)或融合 :目的是将视觉和自然语言建模到同一表征空间并进行融合,实现自然语言和视觉语义的互通,这点同样离不开预训练这一过程。模态对齐是处理多模态问题的基础,也是现在流行的多模态大模型技术前提。 对于视觉表征,从发展上可以分为卷积神经网络(CNN)和Vision Transformer(VIT)两大脉络,二者分别都有各自的表征、预训练以及多模态对齐的发展过程。而对于VIT线,另有多模态大模型如火如荼的发展,可谓日新月异。 CNN:视觉理解的一代先驱 点击展开 卷积视觉表征模型和预训练...
杂七杂八
2026-04-15
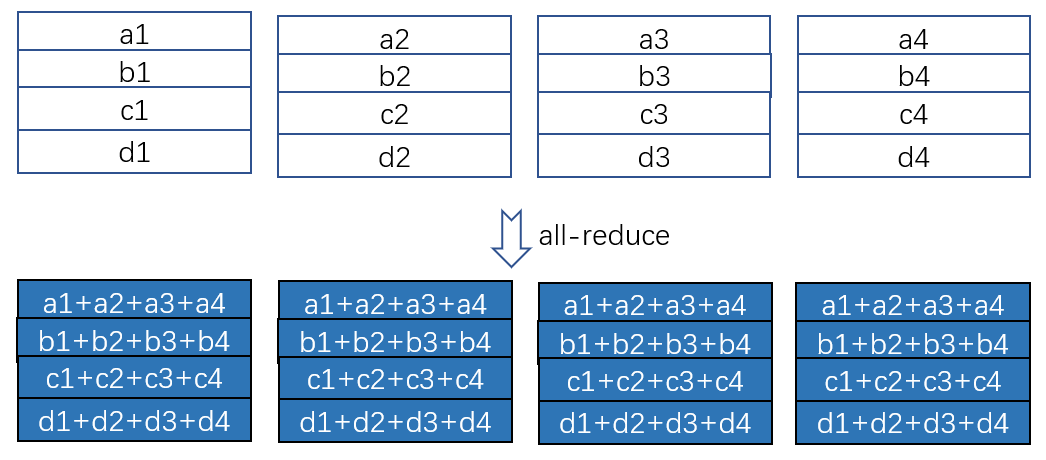
分布式深度学习里的通信严重依赖于规则的集群通信,诸如 all-reduce, reduce-scatter, all-gather 等,因此,实现高度优化的集群通信,以及根据任务特点和通信拓扑选择合适的集群通信算法至关重要。 本文以数据并行经常使用的 all-reduce 为例来展示集群通信操作的数学性质。 All-reduce 在干什么? 图 1:all-reduce 如图 1 所示,一共 4个设备,每个设备上有一个矩阵(为简单起见,我们特意让每一行就一个元素), all-reduce 操作的目的是,让每个设备上的矩阵里的每一个位置的数值都是所有设备上对应位置的数值之和。 图2 如图 2 所示, all-reduce 可以通过 reduce-scatter 和 all-gather 这两个更基本的集群通信操作来实现。基于 ring 状通信可以高效的实现 reduce-scatter 和 all-gather,下面我们分别用示意图展示其过程。 reduce-scatter 的实现和性质 图 3:通过环状通信实现 reduce-scatter 从图 2...
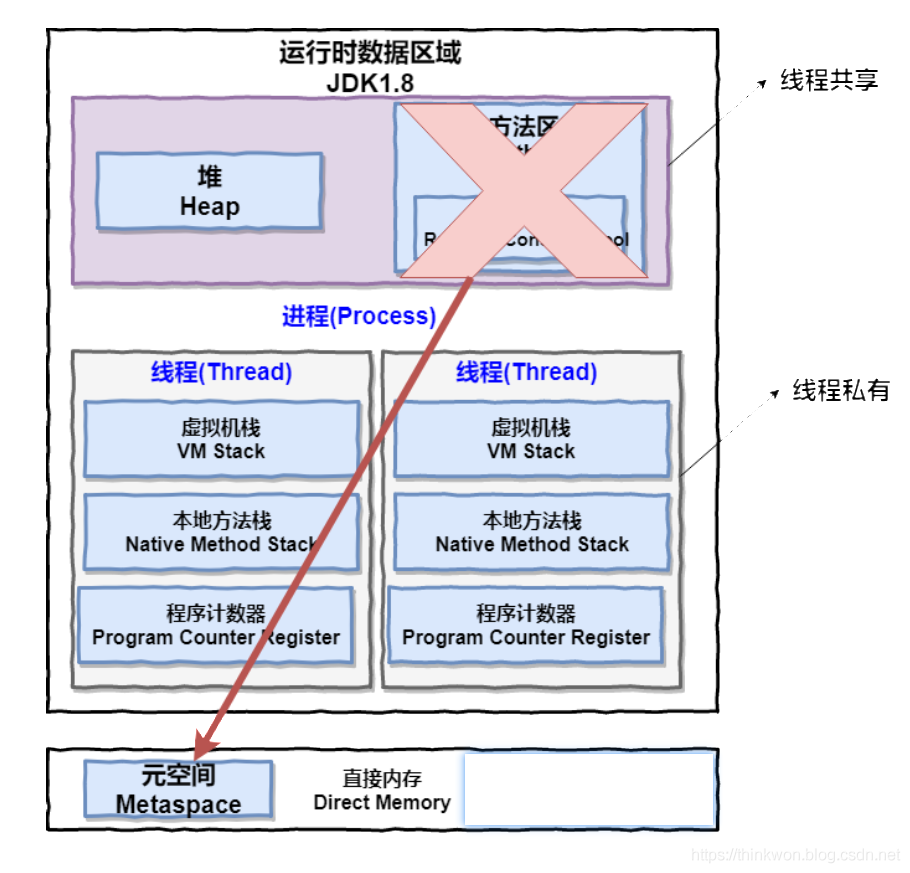
一个在内存中运行的应用程序。每个进程都有自己独立的一块内存空间,一个进程可以有多个线程,比如在Windows系统中,一个运行的xx.exe就是一个进程。 线程 进程中的一个执行任务(控制单元),负责当前进程中程序的执行。一个进程至少有一个线程,一个进程可以运行多个线程,多个线程可共享数据。 与进程不同的是同类的多个线程共享进程的堆和方法区资源,但每个线程有自己的程序计数器、虚拟机栈和本地方法栈,所以系统在产生一个线程,或是在各个线程之间作切换工作时,负担要比进程小得多,也正因为如此,线程也被称为轻量级进程。 Java 程序天生就是多线程程序,我们可以通过 JMX 来看一下一个普通的 Java 程序有哪些线程,代码如下。 public class MultiThread {
public static void main(String[] args) {
// 获取 Java 线程管理 MXBean
ThreadMXBean threadMXBean = ManagementFactory.getThreadMXBean();
// 不需要获取同步的 monitor 和...