DFS
Generative Model
2026-01-11
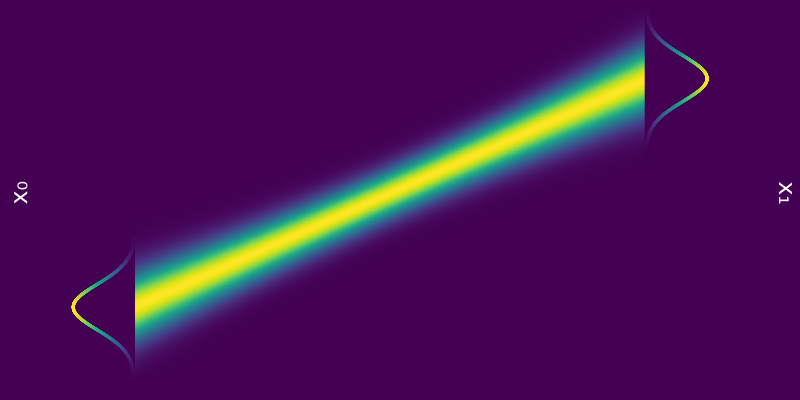
💡 Flowbased Models Normalizing Flow Normalizing Flow 是一种基于变换对概率分布进行建模的模型,其通过一系列离散且可逆的变换实现任意分布与先验分布(例如标准高斯分布)之间的相互转换。在 Normalizing Flow 训练完成后,就可以直接从高斯分布中进行采样,并通过逆变换得到原始分布中的样本,实现生成的过程。(有关 Normalizing Flow 的详细理论) 从这个角度看,Normalizing Flow 和 Diffusion Model 是有一些相通的,其做法的对比如下表所示。从表中可以看到,两者大致的过程是非常类似的,尽管依然有些地方不一样,但这两者应该可以通过一定的方法得到一个比较统一的表示。 Continuous Norma...
Deep Learning
2026-01-11

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 X ,其取值来自有限集合 [Math] 。我们的目标是估计 E[X] 。假设我们有一个独立同分布的样本序列 \{x_i\}_{i=1}^n ,那么 X 的期望值可以近似为: [公式] 非增量方法与增量方法 非增量方法:先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法:定义 [公式] 可以推导出递归公式: [公式] 这个算法可以增量式地...
Deep Learning
2026-01-11

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 1、Upsampling(上采样)[没有学习过程] 在FCN、Unet等网络结构中,涉及到了上采样。上采样概念:上采样指的是任何可以让图像变成更高分辨率的技术。最简单的方式是重采样和插值:将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在torch.nn中的Vision Layers里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d 0)PixelShuffl...
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Large Model
2026-01-11
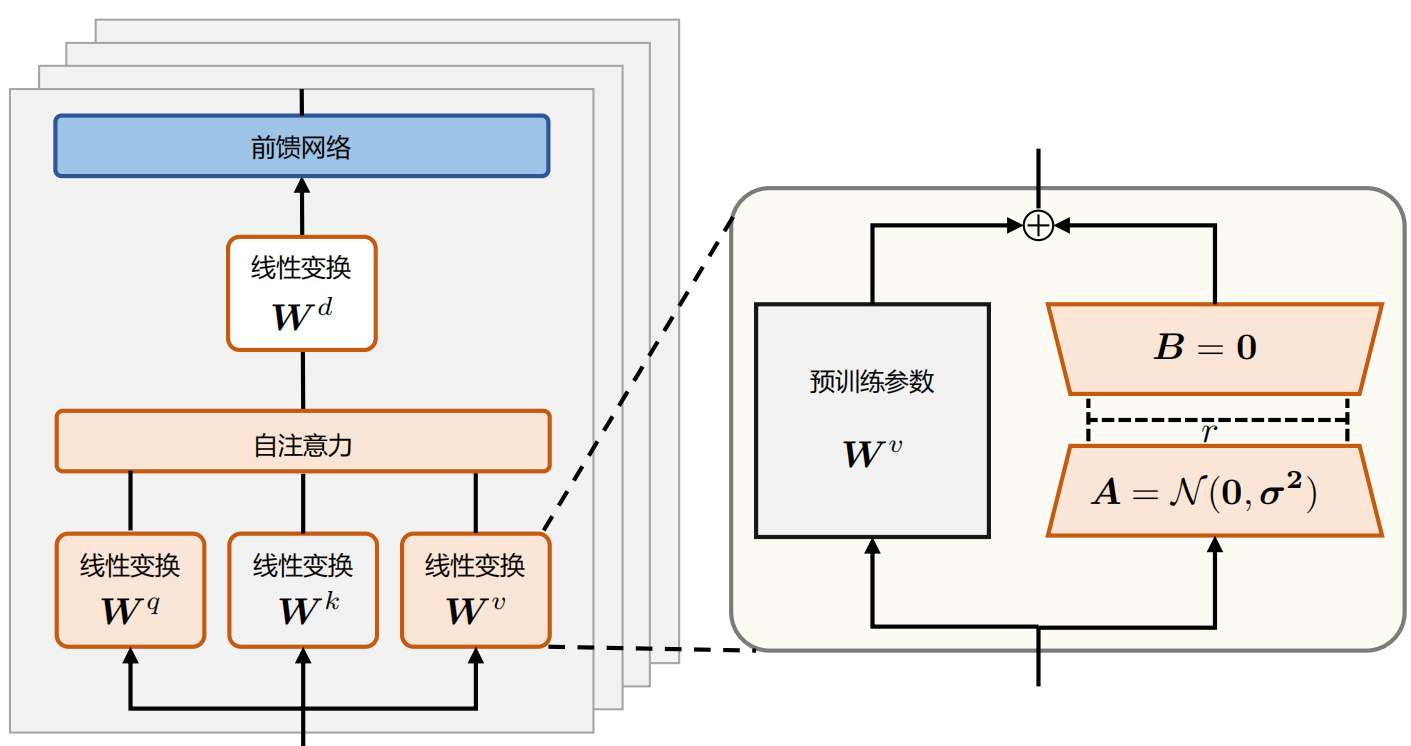
背景 随着预训练语言模型进入LLM时代,其参数量愈发庞大。全量微调模型所有参数所需的显存早已水涨船高。 例如: 全参微调Qwen1.57BChat预估要2张80GB的A800,160GB显存 全参微调Qwen1.572BChat预估要20张80GB的A800,至少1600GB显存。 而且,通常不同的下游任务还需要LLM的全量参数,对于算法服务部署来说简直是个灾难 当然,一种折衷做法就是全量微调后把增量参数进行SVD分解保存,推理时再合并参数 为了寻求一个不更新全部参数的廉价微调方案,之前一些预训练语言模型的高效微调(Parameter Efficient finetuning, PEFT)工作,要么插入一些参数或学习外部模块来适应新的下游任务。 LoRA LoRA(LowRank Adapt...
Deep Learning
2026-01-11
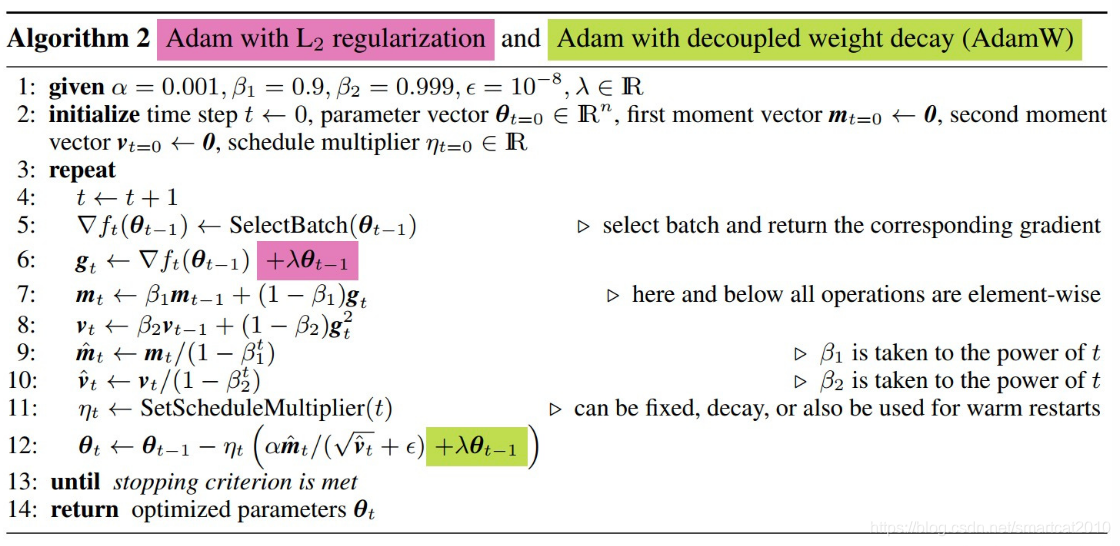
AdamW目前是大语言模型训练的默认优化器,而大部分资料对Adam跟AdamW区别的介绍都不是很明确,在此梳理一下Adam与AdamW的计算流程,明确一下二者的区别。 TLDR:AdamW将优化过程中使用的针对网络权重的衰减项(或者叫正则项)从loss中单独拿了出来,不参与Adam中一二阶动量的计算。 下面是二者的详细对比: Adam 首先是Adam,给定在迭代步数 t 时模型的参数 [Math] 与梯度 g_t ,Adam的计算公式如下: [公式] 式(1)用于计算梯度的一阶指数滑动平均 式(2)用于计算梯度的二阶项的指数滑动平均 式(3)与(4)对计算得到的指数滑动平均值进行消偏 式(5)为Adam的更新公式,其可以拆成两部分理解:动量更新与自适应学习率。 AdamW AdamW 相对与...
Generative Model
2026-01-11

🔖 https://stability.ai/news/stablediffusion3researchpaper 概述 SD3 模型与训练策略改进细节 SD3除了将去噪网络从 UNet 改成 DiT 外,SD3 还在模型结构与训练策略上做了很多小改进: 改变训练时噪声采样方法 将一维位置编码改成二维位置编码 提升 VAE 隐空间通道数 对注意力 QK 做归一化以确保高分辨率下训练稳定 本文会简单介绍这些改进。 论文阅读 核心贡献 介绍 Stable Diffusion 3 (SD3) 的文章标题为 Scaling Rectified Flow Transformers for HighResolution Image Synthesis。与其说它是一篇技术报告,更不如说它是一篇论文,因为它...
Algorithm
2026-01-11
题目 给定一个无序的数组,找出数组在排序之后,相邻元素之间最大的差值。 如果数组元素个数小于 2,则返回 0。 Example 1: [代码] 解题思路:如果进行排序,这里会超时。采用桶排序 排序算法 的思想,可以在线性时间解决。 1. 首先建立桶,每个桶中只需要存放这个桶中元素的最大值和最小值。 1. 我们期望将数组中的各个数等距离分配,也就是每个桶的长度相同,也就是对于所有桶来说,桶内最大值减去桶内最小值都是一样的。可以当成公式来记。 1. 确定桶的数量,最后的加一保证了数组的最大值也能分到一个桶。为什么需要这样规定桶的尺寸呢?因为这样可以让最大的间距的两个元素在两个不同的桶中。可以证明一下,因为我们用元素范围之差除以元素个数,所以桶的尺寸就是平均的元素间距,显然最大间距的两个元素不可能...
Algorithm
2026-01-11
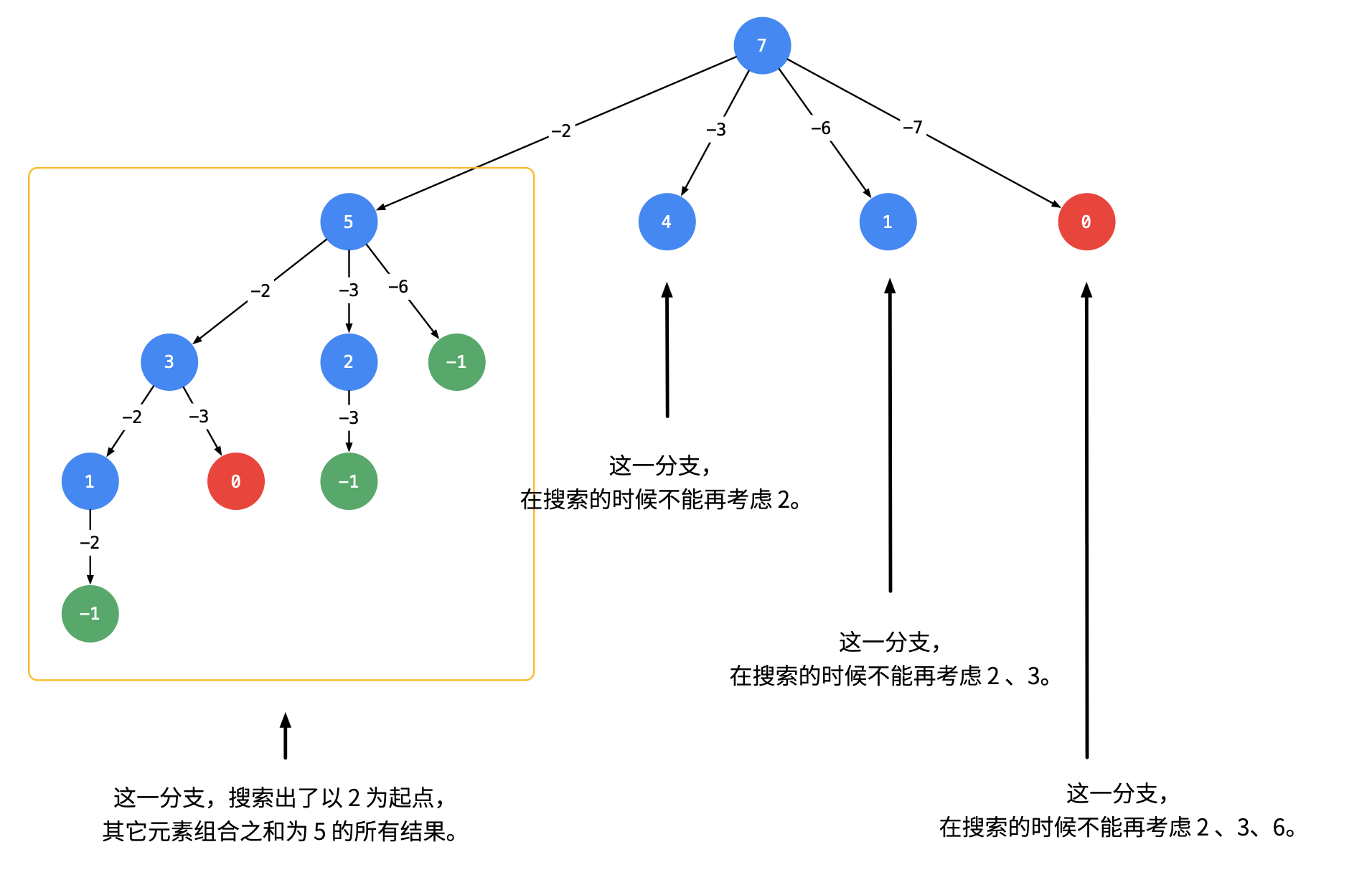
1. 可以重复选取 给定一个无重复元素的数组 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的数字可以无限制重复被选取。 画出树状搜索图如下, 为了去除重复的情况, 我们需要按照某种顺序搜索,具体做法是:每一次搜索的时候,设置下一轮搜索的起点 [代码] 2. 不能被重复选取 与上面的区别在于 1. index每次不要重复搜索,而是去寻找下一个 1. 排除重复的元素 [代码]
Computer Vision
2026-01-11
mAP定义及相关概念 mAP: mean Average Precision, 即各类别AP的平均值 AP: PR曲线下面积,后文会详细讲解 PR曲线: PrecisionRecall曲线 Precision: TP / (TP + FP) Recall: TP / (TP + FN) TP: IoU0.5的检测框数量(同一Ground Truth只计算一次) FP: IoU= 0, 0.1, 0.2, ..., 1共11个点时的Precision最大值,然后AP就是这11个Precision的平均值。 在VOC2010及以后,需要针对每一个不同的Recall值(包括0和1),选取其大于等于这些Recall值时的Precision最大值,然后计算PR曲线下面积作为AP值。 mAP计算示例 假...
01背包 描述 有N件物品和一个容量为V的背包。 第i件物品的体积是vi,价值是wi。 求解将哪些物品装入背包,可使这些物品的总体积不超过背包流量,且总价值最大。 二维动态规划 f[i][j] 表示只看前i个物品,总体积是j的情况下,总价值最大是多少。 result = max(f[n][0V]) f[i][j]: 不选第i个物品:f[i][j] = f[i1][j]; 选第i个物品:f[i][j] = f[i1][jv[i]] + w[i](v[i]是第i个物品的体积) 两者之间取最大。 初始化:f[0][0] = 0 代码如下: [代码] 一维动态优化 从上面二维的情况来看,f[i] 只与f[i1]相关,因此只用使用一个一维数组[0v]来存储前一个状态。那么如何来实现呢? 第一个问题:状...