Reinforcement Learning
2026-01-11

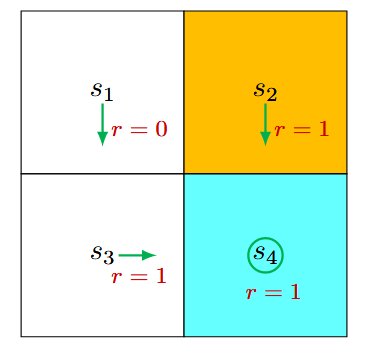
基础概念 GridWord Example 环境描述:网格世界是一个直观的二维环境,包含: 任务目标: 什么是强化学习:依据策略执行动作感知状态得到奖励 所谓强化学习(Reinforcement Learning,简称RL),是指基于智能体在复杂、不确定的环境中最大化它能获得的奖励,从而达到自主决策的目的。 a computational approach to learning whereby an agent tries to maximize the total amount of reward it receives while interacting with a complex and uncertain environment 经典的强化学习模型可以总结为下图的形式(你可以理解...