
Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用 \((r,θ)\) 两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的 \((r,θ)\) ,在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数 \((r,θ)\) 就在每条曲线中都存在,所以看起来就像是多条曲线相交在 \((r,θ)\) 。可以用多条曲线投票的方式来看,其他点都是很少的票数,而 \((r,θ)\) 则票数很多,所以直线的参数就是 \((r,θ)\) 。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数高的就是要得到的值。 文中提到的Hough Voting如下: A traditional Hough voting 2D detector comprises an offline and an online step....
3D Model
2026-02-12

三维深度学习简介 多视角(multi-view):通过多视角二维图片组合为三维物体,此方法将传统CNN应用于多张二维视角的图片,特征被view pooling procedure聚合起来形成三维物体; 体素(volumetric):通过将物体表现为空间中的体素进行类似于二维的三维卷积(例如,卷积核大小为5x5x5),是规律化的并且易于类比二维的,但同时因为多了一个维度出来,时间和空间复杂度都非常高,目前已经不是主流的方法了; 点云(point clouds):直接将三维点云抛入网络进行训练,数据量小。主要任务有分类、分割以及大场景下语义分割; 非欧式(manifold,graph):在流形或图的结构上进行卷积,三维点云可以表现为mesh结构,可以通过点对之间临接关系表现为图的结构。 点云的特性 无序性...

概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translation-invariance和permutation-invariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR-10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例说明一下如何将卷积拓展到点云。这里只考虑使用一个kernel在一个location的一次卷积操作。 对于二维图像,我们可以将图像的pixels看作是一个点,那么图像就是整齐排列的点阵。每个point都有维度为 \(C_{in}\)...
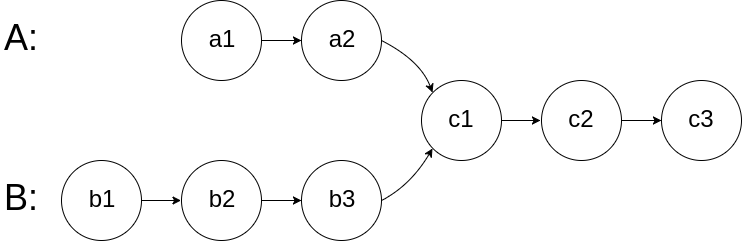
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...