DFS
NLP
2026-01-11

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了Transformer。Transformer 是Google Brain 2017的提出的一篇工...
Generative Model
2026-01-11
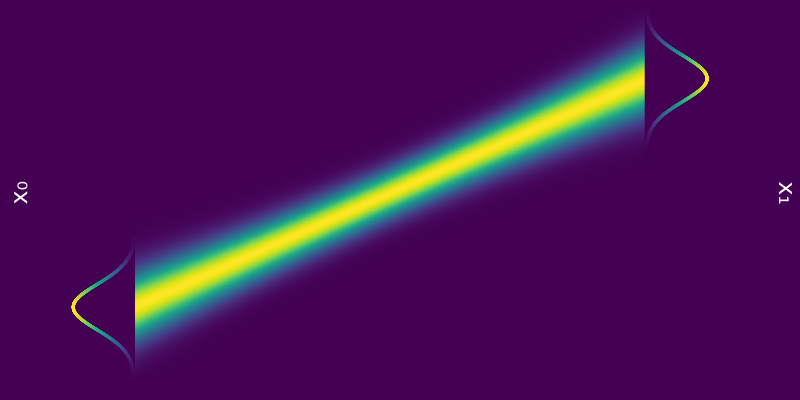
💡 Flowbased Models Normalizing Flow Normalizing Flow 是一种基于变换对概率分布进行建模的模型,其通过一系列离散且可逆的变换实现任意分布与先验分布(例如标准高斯分布)之间的相互转换。在 Normalizing Flow 训练完成后,就可以直接从高斯分布中进行采样,并通过逆变换得到原始分布中的样本,实现生成的过程。(有关 Normalizing Flow 的详细理论) 从这个角度看,Normalizing Flow 和 Diffusion Model 是有一些相通的,其做法的对比如下表所示。从表中可以看到,两者大致的过程是非常类似的,尽管依然有些地方不一样,但这两者应该可以通过一定的方法得到一个比较统一的表示。 Continuous Norma...
Generative Model
2026-01-11
技术分析 从方法上来看,条件控制生成的方式分两种:事后修改(ClassifierGuidance)和事前训练(ClassifierFree)。 对于大多数人来说,一个SOTA级别的扩散模型训练成本太大了,而分类器(Classifier)的训练还能接受,所以就想着直接复用别人训练好的无条件扩散模型,用一个分类器来调整生成过程以实现控制生成,这就是事后修改的ClassifierGuidance方案;而对于“财大气粗”的Google、OpenAI等公司来说,它们不缺数据和算力,所以更倾向于往扩散模型的训练过程中就加入条件信号,达到更好的生成效果,这就是事前训练的ClassifierFree方案。 ClassifierGuidance方案最早出自《Diffusion Models Beat GANs...
Generative Model
2026-01-11

SD模型原理 SD是CompVis、Stability AI和LAION等公司研发的一个文生图模型,它的模型和代码是开源的,而且训练数据LAION5B也是开源的。SD在开源90天github仓库就收获了33K的stars,可见这个模型是多受欢迎。 SD是一个基于latent的扩散模型,它在UNet中引入text condition来实现基于文本生成图像。SD的核心来源于Latent Diffusion这个工作,常规的扩散模型是基于pixel的生成模型,而Latent Diffusion是基于latent的生成模型,它先采用一个autoencoder将图像压缩到latent空间,然后用扩散模型来生成图像的latents,最后送入autoencoder的decoder模块就可以得到生成的图像。 ...
Large Model
2026-01-11

引言与背景 FlashAttention的关键创新在于使用类似于在线Softmax的思想来对自注意力计算进行分块(tiling),从而能够融合整个多头注意力层的计算,而无需访问GPU全局内存来存储中间的logits和注意力分数 在深度学习中,Transformer模型的自注意力机制是计算密集型操作。传统实现需要在GPU全局内存中存储大量中间结果,这导致: 内存瓶颈:中间矩阵占用大量显存 I/O开销:频繁的全局内存访问降低效率 扩展性限制:难以处理超长序列 FlashAttention通过算法创新解决了这些问题。 SelfAtention 自注意力机制的计算可以总结为(为简化说明,忽略头数和批次维度,也省略注意力掩码和缩放因子 [Math] ): [公式] 其中: Q, K, V, O 都是形...
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Generative Model
2026-01-11
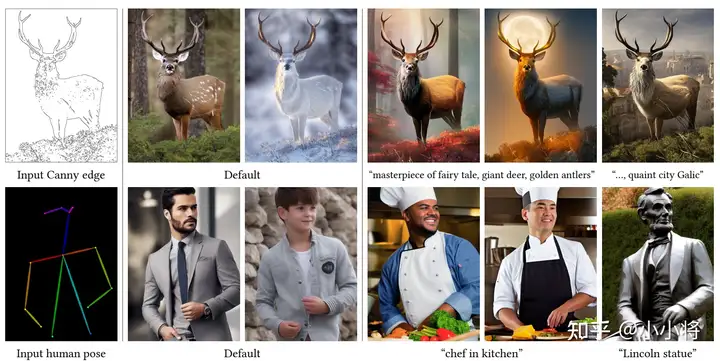
ControlNet应该算是2023年文生图领域最重要的工作,它让文生图模型Stable Diffusion实现了文本之外的可控生成,让AI绘画实现了质的飞跃。这篇文章我们将简单总结一下ControlNet技术细节。 模型设计 ControlNet的模型结构如下所示,这里是直接复制一份SD的上半部分:Encoder和中间的Middle Block。 ControlNet的输入和原始的SD一样,包括noisy latents、time embedding以及text embedding。除此之外,ControlNet还需要引入额外的condition,这个condition是和原图一样大小的图像,比如canny边界图或者人体骨架图。这里并没有像SD那样采用VAE对condition进行编码,而...
Generative Model
2026-01-11

💡 随机微分 在DDPM中,扩散过程被划分为了固定的T步,还是用DDPM中的类比来说,就是“拆楼”和“建楼”都被事先划分为了T步,这个划分有着相当大的人为性。事实上,真实的“拆”、“建”过程应该是没有刻意划分的步骤的,我们可以将它们理解为一个在时间上连续的变换过程,可以用随机微分方程(Stochastic Differential Equation,SDE)来描述。 为此,我们用下述SDE描述前向过程(“拆楼”): [公式] 相信很多读者都对SDE很陌生,笔者也只是在硕士阶段刚好接触过一段时间,略懂皮毛。不过不懂不要紧,我们只需要将它看成是下述离散形式在 [Math] 时的极限: [公式] 再直白一点,如果假设拆楼需要1天,那么拆楼就是 [Math] 从 t=0 到 t=1 的变化过程,每一...
Generative Model
2026-01-11

🔖 https://stability.ai/news/stablediffusion3researchpaper 概述 SD3 模型与训练策略改进细节 SD3除了将去噪网络从 UNet 改成 DiT 外,SD3 还在模型结构与训练策略上做了很多小改进: 改变训练时噪声采样方法 将一维位置编码改成二维位置编码 提升 VAE 隐空间通道数 对注意力 QK 做归一化以确保高分辨率下训练稳定 本文会简单介绍这些改进。 论文阅读 核心贡献 介绍 Stable Diffusion 3 (SD3) 的文章标题为 Scaling Rectified Flow Transformers for HighResolution Image Synthesis。与其说它是一篇技术报告,更不如说它是一篇论文,因为它...
NLP
2026-01-11

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4,不算太老,而SSM最新最火的变体大概是Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mam...
Large Model
2026-01-11
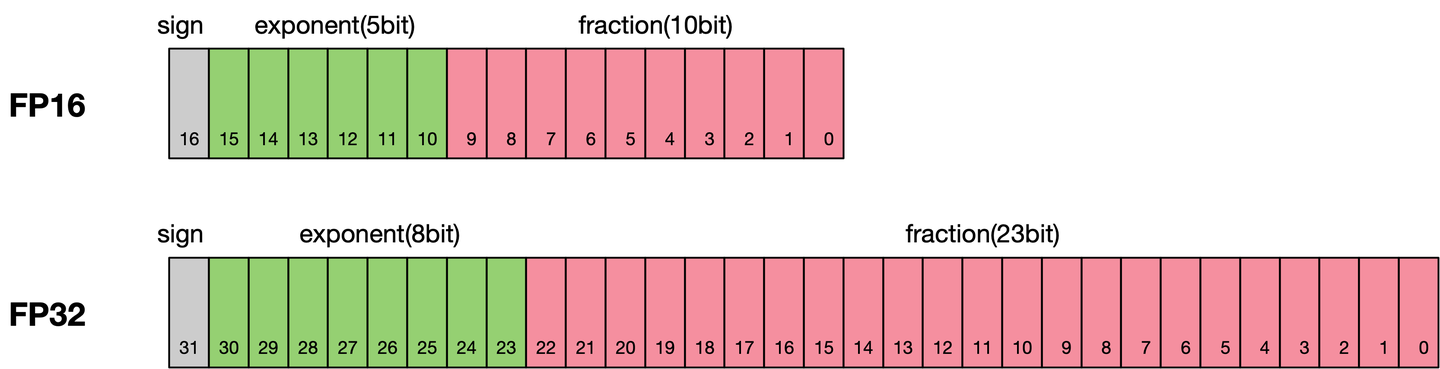
通常我们训练神经网络模型的时候默认使用的数据类型为单精度FP32。近年来,为了加快训练时间、减少网络训练时候所占用的内存,并且保存训练出来的模型精度持平的条件下,业界提出越来越多的混合精度训练的方法。这里的混合精度训练是指在训练的过程中,同时使用单精度(FP32)和半精度(FP16)。 浮点数据类型 浮点数据类型主要分为双精度(FP64)、单精度(FP32)、半精度(FP16)。在神经网络模型的训练过程中,一般默认采用单精度(FP32)浮点数据类型,来表示网络模型权重和其他参数。在了解混合精度训练之前,这里简单了解浮点数据类型。 根据IEEE二进制浮点数算术标准(IEEE 754)的定义,浮点数据类型分为双精度(FP64)、单精度(FP32)、半精度(FP16)三种,其中每一种都有三个不同的...