计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Computer Vision
2026-01-11

原理分析 网络架构: 本文的任务是Object detection,用到的工具是Transformers,特点是Endtoend。 目标检测的任务是要去预测一系列的Bounding Box的坐标以及Label, 现代大多数检测器通过定义一些proposal,anchor或者windows,把问题构建成为一个分类和回归问题来间接地完成这个任务。文章所做的工作,就是将transformers运用到了object detection领域,取代了现在的模型需要手工设计的工作,并且取得了不错的结果。在object detection上DETR准确率和运行时间上和Faster RCNN相当;将模型 generalize 到 panoptic segmentation 任务上,DETR表现甚至还超过了其他...
Large Model
2026-01-11

UITARS 简介 UITARS(User Interface Task Automation and Reasoning System)是由字节跳动(ByteDance)研发的原生 GUI 智能体模型: 输入方式:仅使用屏幕截图作为视觉输入 交互方式:执行类人操作(键盘输入、鼠标点击、拖拽等) 模型特性:端到端的原生智能体模型,无需复杂的中间件或框架 传统 GUI 智能体的开发往往依赖于文本信息,例如 HTML 结构和可访问性树。虽然这些方法取得了一些进展,但它们也存在一些局限性: 平台不一致性:不同平台的 GUI 结构差异很大,导致智能体难以跨平台通用。 信息冗余:文本信息往往过于冗长,增加了模型的处理负担。 访问限制:获取系统底层的文本信息通常需要较高的权限,限制了应用的范围。 模块化...
NLP
2026-01-11

摘掉Softmax 制约Attention性能的关键因素,其实是定义里边的Softmax!事实上,简单地推导一下就可以得到这个结论。 [Math] 这一步我们得到一个 [Math] 的矩阵,就是这一步决定了Attention的复杂度是 [Math] ;如果没有Softmax,那么就是三个矩阵连乘 [Math] ,而矩阵乘法是满足结合率的,所以我们可以先算 [Math] ,得到一个 [Math] 的矩阵,然后再用 [Math] 左乘它,由于 [Math] ,所以这样算大致的复杂度只是 [Math] (就是 [Math] 左乘那一步占主导)。 也就是说,去掉Softmax的Attention的复杂度可以降到最理想的线性级别 [Math] !这显然就是我们的终极追求:Linear Attentio...
NLP
2026-01-11

概述 本文介绍一个比较有意思的高效Transformer工作——来自Google的《Transformer Quality in Linear Time》,经过细读之后,笔者认为论文里边真算得上是“惊喜满满”了~ 什么样的结果值得我们用“惊喜”来形容?有没有言过其实?我们不妨先来看看论文做到了什么: 1. 提出了一种新的Transformer变体,它依然具有二次的复杂度,但是相比标准的Transformer,它有着更快的速度、更低的显存占用以及更好的效果; 1. 提出一种新的线性化Transformer方案,它不但提升了原有线性Attention的效果,还保持了做Decoder的可能性,并且做Decoder时还能保持高效的训练并行性。 说实话,笔者觉得做到以上任意一点都是非常难得的,而这篇论...
Reinforcement Learning
2026-01-11

引言 DDPG同样使用了ActorCritic的结构,Deterministic的确定性策略是和随机策略相对而言的,对于某一些动作集合来说,它可能是连续值,或者非常高维的离散值,这样动作的空间维度极大。如果我们使用随机策略,即像DQN一样研究它所有的可能动作的概率,并计算各个可能的动作的价值的话,那需要的样本量是非常大才可行的。于是有人就想出使用确定性策略来简化这个问题。 作为随机策略,在相同的策略,在同一个状态 s 处,采用的动作 [Math] 是基于一个概率分布的,即是不确定的。而确定性策略则决定简单点,虽然在同一个状态处,采用的动作概率不同,但是最大概率只有一个,如果我们只取最大概率的动作,去掉这个概率分布,那么就简单多了。即作为确定性策略,相同的策略,在同一个状态处,动作是唯一确定的...
NLP
2026-01-11
问题引入 前几天在训练一个新的Transformer模型的时候,发现怎么训都不收敛了。经过一番debug,发现是在做Self Attention的时候 [Math] 之后忘记除以 [Math] 了,于是重新温习了一下为什么除以 [Math] 如此重要的原因。当然,Google的T5确实是没有除以 [Math] 的,但它依然能够正常收敛,那是因为它在初始化策略上做了些调整,所以这个事情还跟初始化有关。 藉着这个机会,本文跟大家一起梳理一下模型的初始化、参数化和标准化等内容,相关讨论将主要以Transformer为心中展开。 参数初始化 采样分布 初始化自然是随机采样的的,所以这里先介绍一下常用的采样分布。一般情况下,我们都是从指定均值和方差的随机分布中进行采样来初始化。其中常用的随机分布有三个...
Reinforcement Learning
2026-01-11

概述与理论背景 ActorCritic方法是强化学习中的一类重要算法,它巧妙地结合了基于策略(policybased)和基于价值(valuebased)的方法。在这种结构中,"Actor"指策略更新步骤,负责根据策略执行动作;而"Critic"指价值更新步骤,负责评估Actor的表现。从另一个角度看,ActorCritic方法本质上仍是策略梯度算法,可以通过扩展策略梯度算法获得。 ActorCritic方法在强化学习中的位置非常重要,它既保留了策略梯度方法直接优化策略的优势,又利用了值函数方法的效率。这种结合使得ActorCritic方法成为解决复杂强化学习问题的强大工具。 最简单的ActorCritic算法(QAC) QAC算法通过扩展策略梯度方法得到。策略梯度方法的核心思想是通过最大化标...
Algorithm
2026-01-11
题目 给定一个无序的数组,找出数组在排序之后,相邻元素之间最大的差值。 如果数组元素个数小于 2,则返回 0。 Example 1: [代码] 解题思路:如果进行排序,这里会超时。采用桶排序 排序算法 的思想,可以在线性时间解决。 1. 首先建立桶,每个桶中只需要存放这个桶中元素的最大值和最小值。 1. 我们期望将数组中的各个数等距离分配,也就是每个桶的长度相同,也就是对于所有桶来说,桶内最大值减去桶内最小值都是一样的。可以当成公式来记。 1. 确定桶的数量,最后的加一保证了数组的最大值也能分到一个桶。为什么需要这样规定桶的尺寸呢?因为这样可以让最大的间距的两个元素在两个不同的桶中。可以证明一下,因为我们用元素范围之差除以元素个数,所以桶的尺寸就是平均的元素间距,显然最大间距的两个元素不可能...
Algorithm
2026-01-11
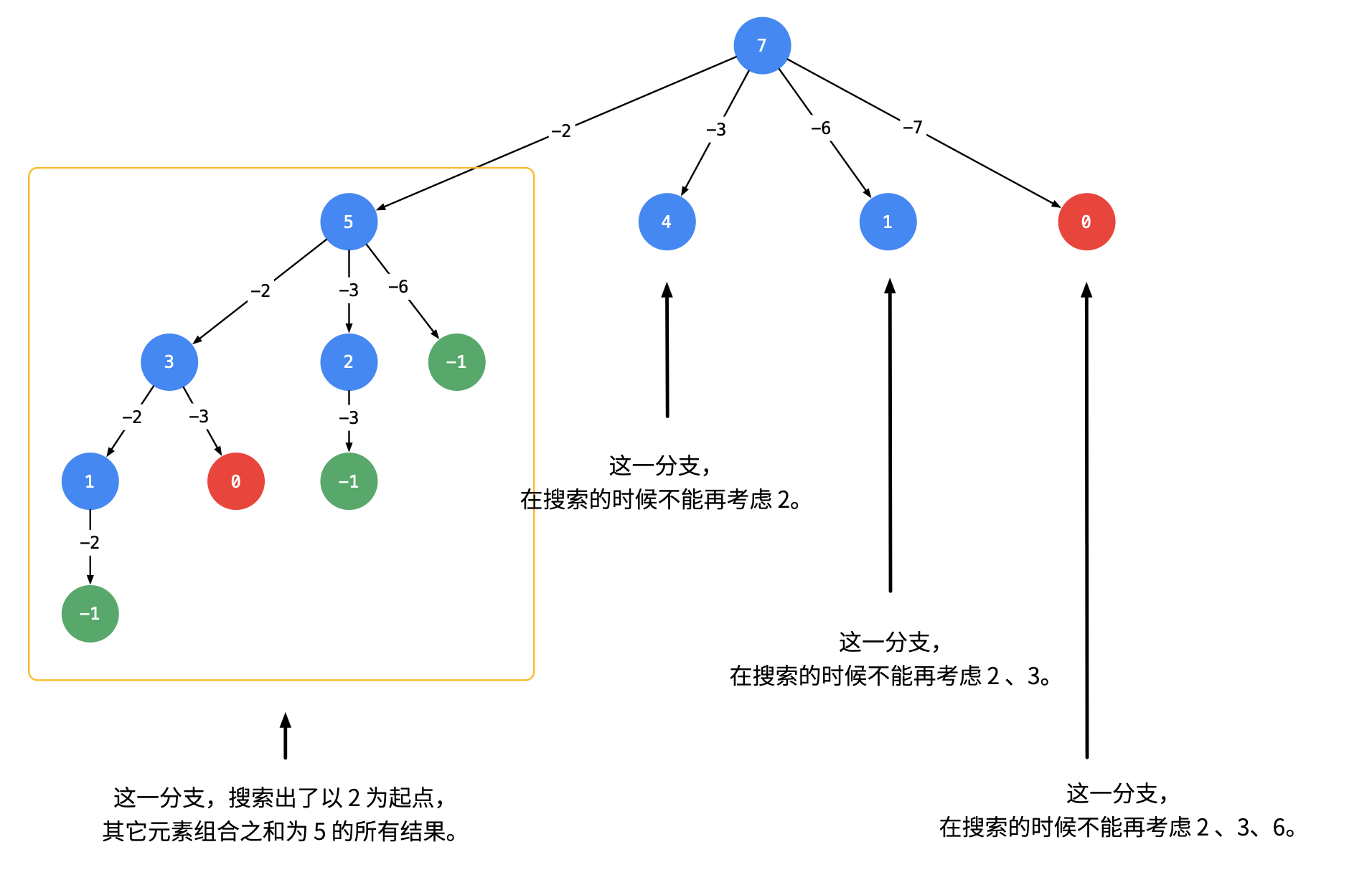
1. 可以重复选取 给定一个无重复元素的数组 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的数字可以无限制重复被选取。 画出树状搜索图如下, 为了去除重复的情况, 我们需要按照某种顺序搜索,具体做法是:每一次搜索的时候,设置下一轮搜索的起点 [代码] 2. 不能被重复选取 与上面的区别在于 1. index每次不要重复搜索,而是去寻找下一个 1. 排除重复的元素 [代码]
Large Model
2026-01-11

概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 D = \{(x_i, y^_i)\}_{i=1}^n ,其中包含问题 x_i 和对应的真实答案 y^_i ,目标是训练一个策略模型 [Math] 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 z = (z_1, z_2, ..., z_m) 来连接问题 x 和答案 y ,每个 z_i 是解决问题的重要中间步骤。 当解决问题 x 时,思维 [Math] 被自回归采样,最终答案 [Math] 。 强化学习目标 基于真实答案 y^ ,分配一个值 [Math] , Ki...
Deep Learning
2026-01-11

简短总结 混合专家模型 (MoEs): 与稠密模型相比, 预训练速度更快 与具有相同参数数量的模型相比,具有更快的 推理速度 需要 大量显存,因为所有专家系统都需要加载到内存中 在 微调方面存在诸多挑战,但 近期的研究 表明,对混合专家模型进行 指令调优具有很大的潜力。 什么是混合专家模型? 模型规模是提升模型性能的关键因素之一。在有限的计算资源预算下,用更少的训练步数训练一个更大的模型,往往比用更多的步数训练一个较小的模型效果更佳。 混合专家模型 (MoE) 的一个显著优势是它们能够在远少于稠密模型所需的计算资源下进行有效的预训练。这意味着在相同的计算预算条件下,您可以显著扩大模型或数据集的...