背包问题
Algorithm
2026-01-11
题目 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百度百科中最近公共祖先的定义为:“对于有根树 T 的两个节点 p、q,最近公共祖先表示为一个节点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以是它自己的祖先)。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1 输出:3 解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4 输出:5 解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root...
Algorithm
2026-01-11
题目 Given two sorted integer arrays nums1 and nums2, merge nums2 into nums1 as one sorted array. Note: The number of elements initialized in nums1 and nums2 are m and n respectively. You may assume that nums1 has enough space (size that is equal to m + n) to hold additional elements from nums2. Example: [代码] Constraints: 10^9 <= nums1[i], nums2[i] <...
3D Model
2026-01-11

整体流程: [代码] 0. 数据预处理 这个步骤主要是crop四路数据,及生成后续步骤所需要的yaml文件。 1. 四路相机与双路相机标定 内参标定 [代码] 这里主要的函数就是: pts = cv2.findChessboardCorners(img, (board_width, board_height))[1] cv2.cornerSubPix(gray, pts, (12, 12), (1, 1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)) det, intr, dist, _, _ = cv2.calibrateCamera(obj_pts, img_pts, self.imgSize, None, No...
Python
2026-01-11
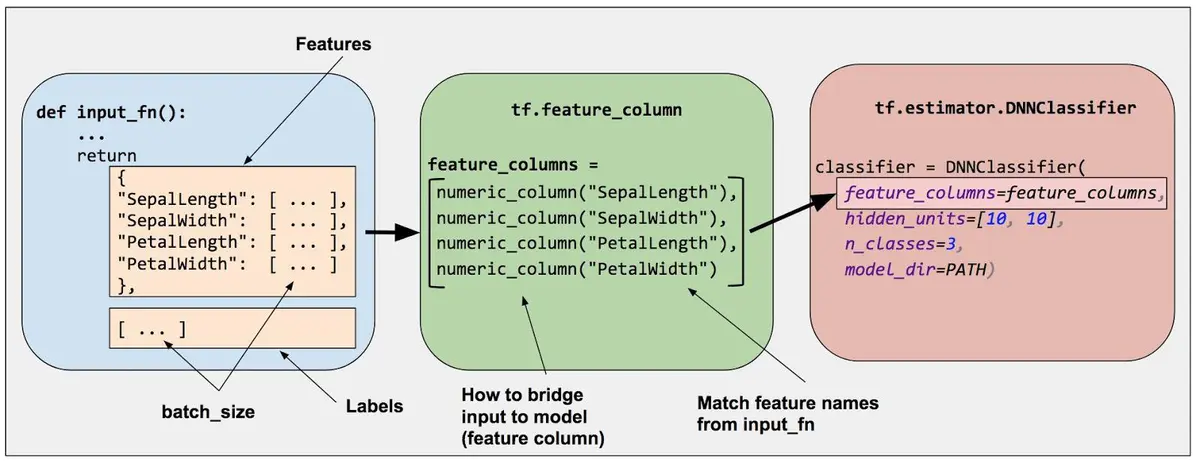
Overview 特征工程是机器学习流程中重要的一个环节,即使是通常用来做端到端学习的深度学习模型在训练之前也免不了要做一些特征工程相关的工作。Tensorflow平台提供的FeatureColumn API为特征工程提供了强大的支持。 Feature cloumns是原始数据和Estimator模型之间的桥梁,它们被用来把各种形式的原始数据转换为模型能够使用的格式。深度神经网络只能处理数值数据,网络中的每个神经元节点执行一些针对输入数据和网络权重的乘法和加法运算。然而,现实中的有很多非数值的类别数据,比如产品的品牌、类目等,这些数据如果不加转换,神经网络是无法处理的。另一方面,即使是数值数据,在仍给网络进行训练之前有时也需要做一些处理,比如标准化、离散化等。 在Tensorflow中,通过...
DFS
Python
2026-01-11
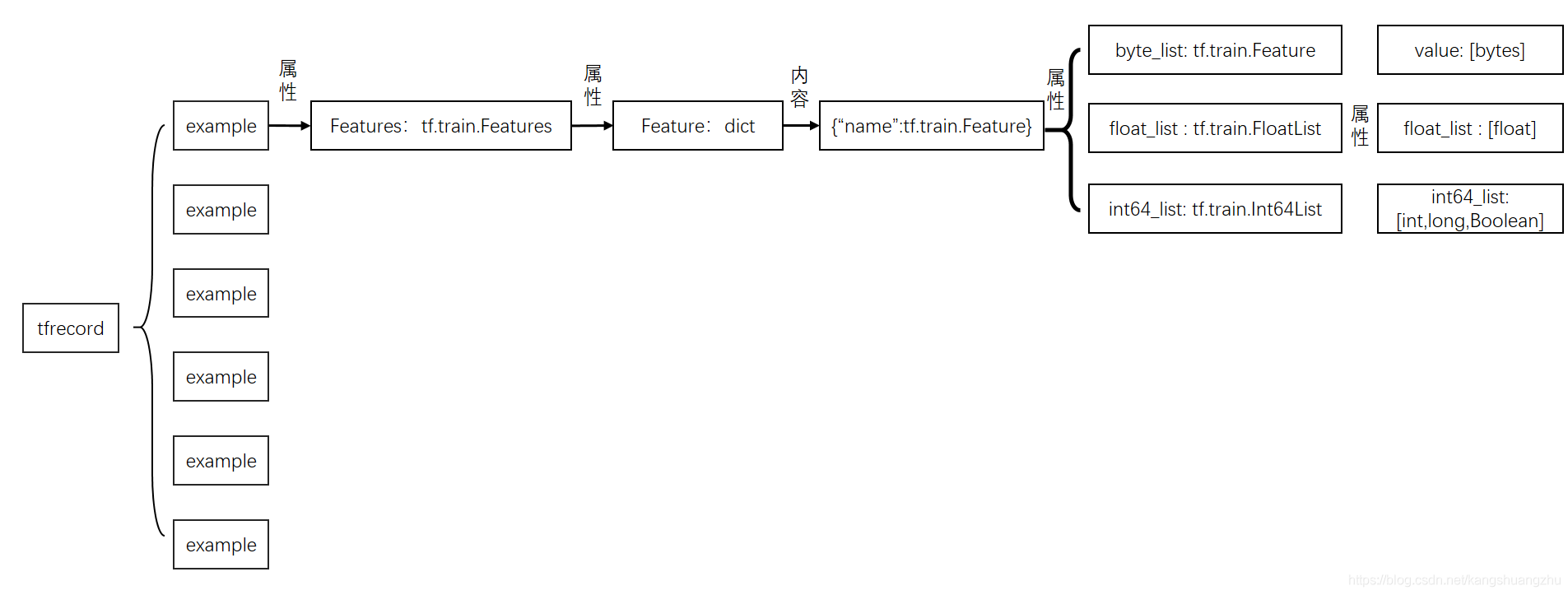
TFRecord TFRecord 是谷歌推荐的一种二进制文件格式,理论上它可以保存任何格式的信息。 tf.Example是一个Protobuffer定义的message,表达了一组string到bytes value的映射。TFRecord文件里面其实就是存储的序列化的tf.Example。关于Protobuffer参考Protobuf 终极教程。 example 我们可以具体到相关代码去详细地看下tf.Example的构成。作为一个Protobuffer message,它被定义在文件core/example/example.proto中: [代码] 只是包了一层Features的message。我们还需要进一步去查找Features的message定义: [代码] 到这里,我们可以看出...
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Computer Vision
2026-01-11

简介 一个完整的人脸识别系统包含以下几个模块 Face Detection: 人脸检测 Face Alignment:基于人脸关键点坐标对齐到正则坐标系下坐标 Face Recognition:基于对齐人脸进行识别 人脸识别的算法流程 人脸的识别流程:面部姿态处理(处理姿态,亮度,表情,遮挡),特征提取,人脸比对。 面部处理 face processing 这部分主要对姿态(主要)、亮度、表情、遮挡进行处理,可提升FR模型性能 主要包含两种处理方式: 1. "Onetomany Augmentation": 从单个图像生成不同姿态的图像,使模型学习到姿态不变性的表示 1. "Manytoone Normalization": 从多个不同姿态的图像中恢复人脸图像的标准视图 特征提取 Backb...

论文地址: 🔖 https://arxiv.org/pdf/2107.11291 代码地址: 前言 一般来说,我们可以把姿态估计任务分成两个流派:Heatmapbased和Regressionbased。 其主要区别在于监督信息的不同,Heatmapbased方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或softargmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression...
Algorithm
2026-01-11
题目 给定一个无序的数组,找出数组在排序之后,相邻元素之间最大的差值。 如果数组元素个数小于 2,则返回 0。 Example 1: [代码] 解题思路:如果进行排序,这里会超时。采用桶排序 排序算法 的思想,可以在线性时间解决。 1. 首先建立桶,每个桶中只需要存放这个桶中元素的最大值和最小值。 1. 我们期望将数组中的各个数等距离分配,也就是每个桶的长度相同,也就是对于所有桶来说,桶内最大值减去桶内最小值都是一样的。可以当成公式来记。 1. 确定桶的数量,最后的加一保证了数组的最大值也能分到一个桶。为什么需要这样规定桶的尺寸呢?因为这样可以让最大的间距的两个元素在两个不同的桶中。可以证明一下,因为我们用元素范围之差除以元素个数,所以桶的尺寸就是平均的元素间距,显然最大间距的两个元素不可能...