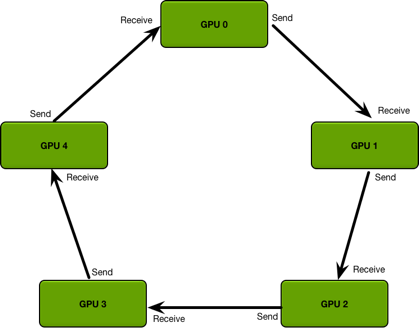
Quick Start 一个最简单的DDP Pytorch例子! 环境准备 PyTorch(gpu)=1.5,python=3.6 推荐使用官方打好的PyTorch docker,避免乱七八糟的环境问题影响心情。 [代码] 代码 单GPU代码 [代码] 加入DDP的代码 [代码] DDP的基本原理 大白话原理 假如我们有N张显卡, 1. (缓解GIL限制)在DDP模式下,会有N个进程被启动,每个进程在一张卡上加载一个模型,这些模型的参数在数值上是相同的。 1. (RingReduce加速)在模型训练时,各个进程通过一种叫RingReduce的方法与其他进程通讯,交换各自的梯度,从而获得所有进程的梯度; 1. (实际上就是Data Parallelism)各个进程用平均后的梯度更新自己的参数,...
Machine Learning
2026-01-11
kd树(kdimensional树的简称),是一种分割k维数据空间的数据结构。主要应用于多维空间关键数据的搜索(如:范围搜索和最近邻搜索)。 应用背景 SIFT算法中做特征点匹配的时候就会利用到kd树。而特征点匹配实际上就是一个通过距离函数在高维矢量之间进行相似性检索的问题。针对如何快速而准确地找到查询点的近邻,现在提出了很多高维空间索引结构和近似查询的算法,kd树就是其中一种。 索引结构中相似性查询有两种基本的方式:一种是范围查询(range searches),另一种是K近邻查询(Kneighbor searches)。范围查询就是给定查询点和查询距离的阈值,从数据集中找出所有与查询点距离小于阈值的数据;K近邻查询是给定查询点及正整数K,从数据集中找到距离查询点最近的K个数据,当K=1时...
DFS
Python
2026-01-11
@tf_export为函数取了个名字! Tensorflow经常看到定义的函数前面加了@tf_export。例如,tensorflow/python/platform/app.py中有: [代码] 首先,@tf_export是一个修饰符。修饰符的本质是一个函数 tf_export的实现在tensorflow/python/util/tf_export.py中: [代码] 等号的右边的理解分两步: 1. functools.partial 1. api_export functools.partial是偏函数,它的本质简而言之是为函数固定某些参数。如:functools.partial(FuncA, p1)的作用是把函数FuncA的第一个参数固定为p1;又如functools.partial(...
Machine Learning
2026-01-11

序言 极大似然估计与贝叶斯估计是统计中两种对模型的参数确定的方法,两种参数估计方法使用不同的思想。前者来自于频率派,认为参数是固定的,我们要做的事情就是根据已经掌握的数据来估计这个参数;而后者属于贝叶斯派,认为参数也是服从某种概率分布的,已有的数据只是在这种参数的分布下产生的。所以,直观理解上,极大似然估计就是假设一个参数 θ ,然后根据数据来求出这个 θ . 而贝叶斯估计的难点在于 p(θ) 需要人为设定,之后再考虑结合MAP(maximum a posterior)方法来求一个具体的 θ . 所以极大似然估计与贝叶斯估计最大的不同就在于是否考虑了先验,而两者适用范围也变成了:极大似然估计适用于数据大量,估计的参数能够较好的反映实际情况;而贝叶斯估计则在数据量较少或者比较稀疏的情况下,考虑...
Machine Learning
2026-01-11

这篇博客介绍一下集成学习的几类:Bagging,Boosting以及Stacking。 传统机器学习算法 (例如:决策树,人工神经网络,支持向量机,朴素贝叶斯等) 的目标都是寻找一个最优分类器尽可能的将训练数据分开。集成学习 (Ensemble Learning) 算法的基本思想就是将多个分类器组合,从而实现一个预测效果更好的集成分类器。集成算法可以说从一方面验证了中国的一句老话:三个臭皮匠,赛过诸葛亮。 Thomas G. Dietterich 指出了集成算法在统计,计算和表示上的有效原因: 统计上的原因 一个学习算法可以理解为在一个假设空间 H 中选找到一个最好的假设。但是,当训练样本的数据量小到不够用来精确的学习到目标假设时,学习算法可以找到很多满足训练样本的分类器。所以,学习算法选择...
PyTorch中,所有神经网络的核心是 autograd 包。 autograd 包为张量上的所有操作提供了自动求导机制。它是一个在运行时定义(definebyrun)的框架,这意味着反向传播是根据代码如何运行来决定的,并且每次迭代可以是不同的. 让我们用一些简单的例子来看看吧。 张量 torch.Tensor 是这个包的核心类。如果设置它的属性 .requires_grad 为 True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用 .backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性. 要阻止一个张量被跟踪历史,可以调用 .detach() 方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。 为了防止跟踪历史记录(和使用内存),...
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Python
2026-01-11
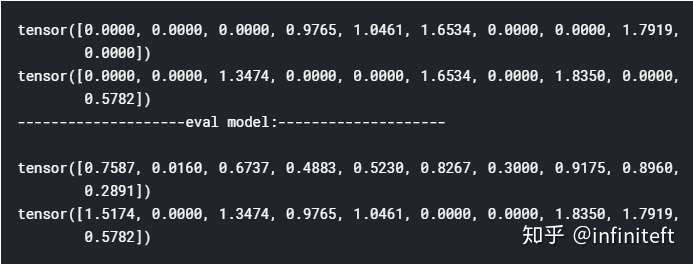
相同点 nn.Xxx和nn.functional.xxx的实际功能是相同的,即nn.Conv2d和nn.functional.conv2d 都是进行卷积,nn.Dropout 和nn.functional.dropout都是进行dropout,。。。。。; 运行效率也是近乎相同。 nn.functional.xxx是函数接口,而nn.Xxx是nn.functional.xxx的类封装,并且nn.Xxx都继承于一个共同祖先nn.Module。这一点导致nn.Xxx除了具有nn.functional.xxx功能之外,内部附带了nn.Module相关的属性和方法,例如train(), eval(),load_state_dict, state_dict 等。 不同点 两者的调用方式不同。 nn.X...
Algorithm
2026-01-11
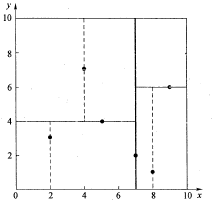
题目 给定一个无序的数组,找出数组在排序之后,相邻元素之间最大的差值。 如果数组元素个数小于 2,则返回 0。 Example 1: [代码] 解题思路:如果进行排序,这里会超时。采用桶排序 排序算法 的思想,可以在线性时间解决。 1. 首先建立桶,每个桶中只需要存放这个桶中元素的最大值和最小值。 1. 我们期望将数组中的各个数等距离分配,也就是每个桶的长度相同,也就是对于所有桶来说,桶内最大值减去桶内最小值都是一样的。可以当成公式来记。 1. 确定桶的数量,最后的加一保证了数组的最大值也能分到一个桶。为什么需要这样规定桶的尺寸呢?因为这样可以让最大的间距的两个元素在两个不同的桶中。可以证明一下,因为我们用元素范围之差除以元素个数,所以桶的尺寸就是平均的元素间距,显然最大间距的两个元素不可能...
Algorithm
2026-01-11
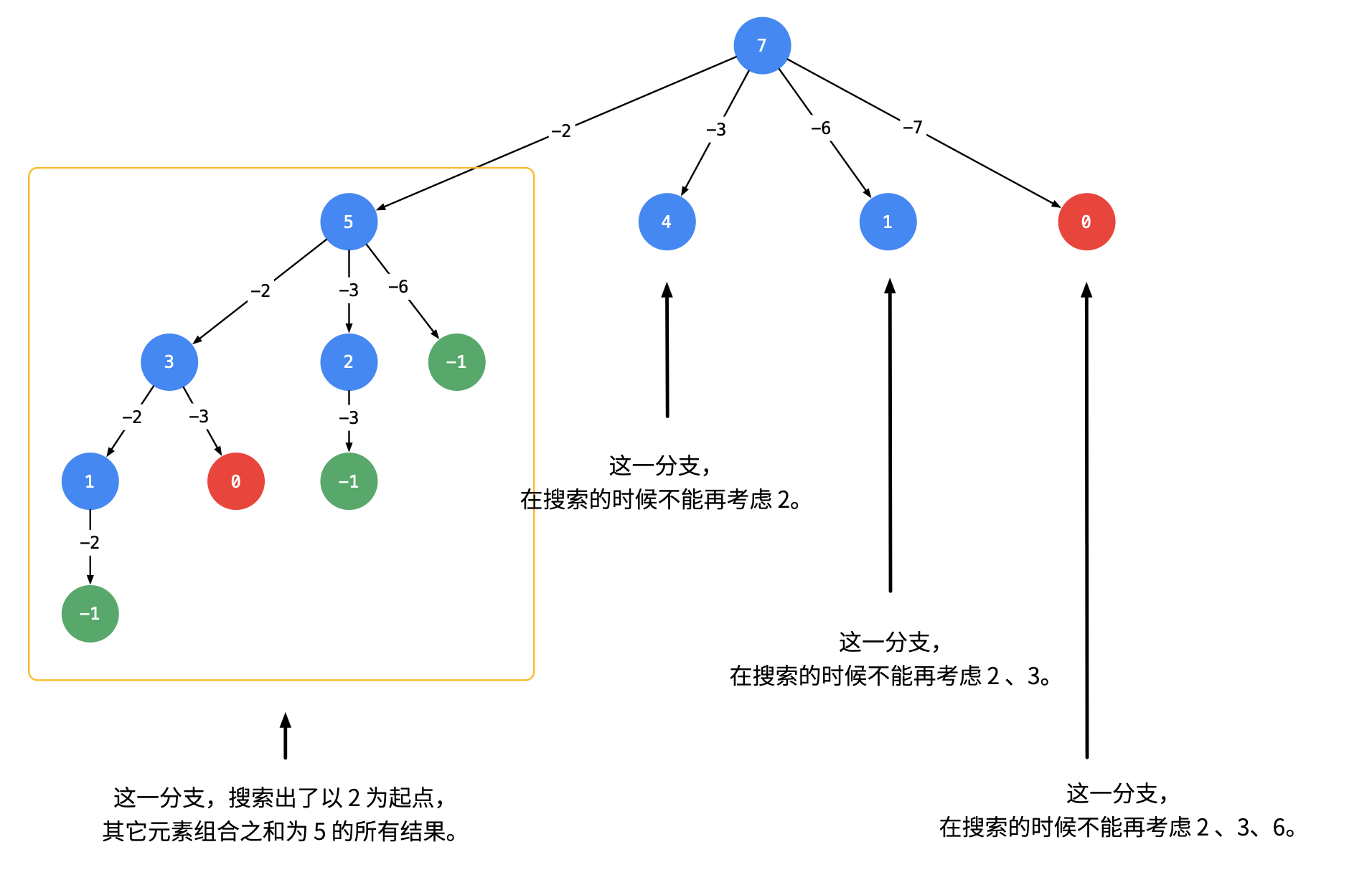
1. 可以重复选取 给定一个无重复元素的数组 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的数字可以无限制重复被选取。 画出树状搜索图如下, 为了去除重复的情况, 我们需要按照某种顺序搜索,具体做法是:每一次搜索的时候,设置下一轮搜索的起点 [代码] 2. 不能被重复选取 与上面的区别在于 1. index每次不要重复搜索,而是去寻找下一个 1. 排除重复的元素 [代码]
01背包 描述 有N件物品和一个容量为V的背包。 第i件物品的体积是vi,价值是wi。 求解将哪些物品装入背包,可使这些物品的总体积不超过背包流量,且总价值最大。 二维动态规划 f[i][j] 表示只看前i个物品,总体积是j的情况下,总价值最大是多少。 result = max(f[n][0V]) f[i][j]: 不选第i个物品:f[i][j] = f[i1][j]; 选第i个物品:f[i][j] = f[i1][jv[i]] + w[i](v[i]是第i个物品的体积) 两者之间取最大。 初始化:f[0][0] = 0 代码如下: [代码] 一维动态优化 从上面二维的情况来看,f[i] 只与f[i1]相关,因此只用使用一个一维数组[0v]来存储前一个状态。那么如何来实现呢? 第一个问题:状...