
Pycharm 的图形化界面虽然好用,但是在某些场景中,是无法使用的。而 Python 本身已经给我们提供了一个调试神器 pdb. 准备文件 在调试之前先将这两个文件准备好(做为演示用),并放在同级目录中。 utils.py [代码] pdb_demo.py [代码] 进入调试模式 主要有两种方法 做为脚本调用,方法很简单,就像正常执行python脚本一样,只是多加了m pdb [代码] 使用这个方式进入调试模式,会在脚本的第一行开始单步调试。 对于单文件的脚本并没有什么问题,如果是一个大型的项目,项目里有很多的文件,使用这种方式只能大大降低我们的效率。 一般情况下,都会直接在你需要的地方打一个断点,那如何打呢? 只需在你想要打断点的地方加上这两行。 [代码] 然后执行时,也不需要再指定m ...
Python
2026-01-11
通过继承创建的新类称为“子类”或“派生类”,被继承的类称为“基类”、“父类”或“超类”,继承的过程,就是从一般到特殊的过程。在某些 OOP 语言中,一个子类可以继承多个基类。但是一般情况下,一个子类只能有一个基类,要实现多重继承,可以通过多级继承来实现 python2中经典类和新式类的继承方式不同,经典类采用深度优先搜索的继承,新式类采用的是广度优先搜索的继承方式 python3中经典类和新式类的继承方式都采用的是都采用广度优先搜索的继承方式 [代码] [代码] 举个例子来说明:现有4个类,A,B,C,D类,D类继承于B类和C类,B类与C类继承于A类。class D(B,C) 实例化D类 深度优先 现在构造函数的继承情况为: 若D类有构造函数,则重写所有父类的继承 若D类没有构造函数,B类有...
3D Model
2026-01-11

整体流程: [代码] 0. 数据预处理 这个步骤主要是crop四路数据,及生成后续步骤所需要的yaml文件。 1. 四路相机与双路相机标定 内参标定 [代码] 这里主要的函数就是: pts = cv2.findChessboardCorners(img, (board_width, board_height))[1] cv2.cornerSubPix(gray, pts, (12, 12), (1, 1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)) det, intr, dist, _, _ = cv2.calibrateCamera(obj_pts, img_pts, self.imgSize, None, No...
Deep Learning
2026-01-11
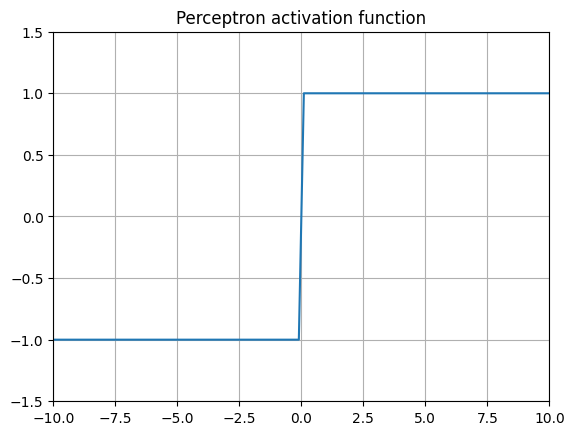
最近,似乎现在每个大型语言模型(LLM)和新闻中提到的复杂神经网络架构都使用略有不同的激活函数,而就在几年前,最常见的做法只是在神经网络的内部层中使用 ReLU。 曾经优秀的 ReLUs 怎么了,以及是什么促使最新的大型语言模型(LLMs)的创造者们开始使用不同的(更高级的)激活函数? Threshold activation (Perceptron) 1957 年,罗森布拉特建造了“感知机” 最古老的激活函数是基本感知器。它由芝加哥大学精神病学系的爱德华·麦克洛奇和沃尔特·皮茨构思,后来由弗兰克·罗森布拉特在 1957 年于康奈尔航空实验室为美国海军在硬件上更著名地实现了。该算法非常简单,其基本规则是:如果某个值超过某个阈值,则返回 1,否则返回 0。有些变体会返回 1 或1。 由于其二元...
Python
2026-01-11
Python程序中存储的所有数据都是对象,每一个对象有一个身份,一个类型和一个值。 看变量的实际作用,执行a = 8 这行代码时,就会创建一个值为8的int对象。 变量名是对这个"一个值为8的int对象"的引用。(也可以简称a绑定到8这个对象) 1、可以通过id()来取得对象的身份 这个内置函数,它的参数是a这个变量名,这个函数返回的值 是这个变量a引用的那个"一个值为8的int对象"的内存地址。 [代码] 2、可以通过type()来取得a引用对象的数据类型 [代码] 3、对象的值 当变量出现在表达式中,它会被它引用的对象的值替代。 总结:类型是属于对象,而不是变量。变量只是对对象的一个引用。 对象有可变对象和不可变对象之分。 Python函数传递参数到底是传值还是引用? 传值、引用这个是c...
Deep Learning
2026-01-11

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 X ,其取值来自有限集合 [Math] 。我们的目标是估计 E[X] 。假设我们有一个独立同分布的样本序列 \{x_i\}_{i=1}^n ,那么 X 的期望值可以近似为: [公式] 非增量方法与增量方法 非增量方法:先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法:定义 [公式] 可以推导出递归公式: [公式] 这个算法可以增量式地...
Deep Learning
2026-01-11

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 1、Upsampling(上采样)[没有学习过程] 在FCN、Unet等网络结构中,涉及到了上采样。上采样概念:上采样指的是任何可以让图像变成更高分辨率的技术。最简单的方式是重采样和插值:将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在torch.nn中的Vision Layers里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d 0)PixelShuffl...
Deep Learning
2026-01-11
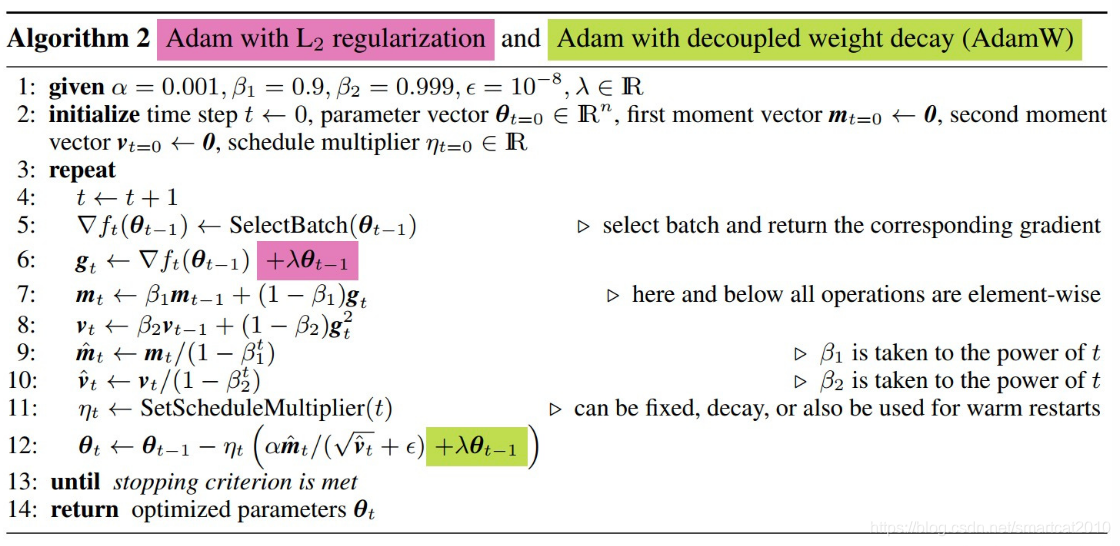
AdamW目前是大语言模型训练的默认优化器,而大部分资料对Adam跟AdamW区别的介绍都不是很明确,在此梳理一下Adam与AdamW的计算流程,明确一下二者的区别。 TLDR:AdamW将优化过程中使用的针对网络权重的衰减项(或者叫正则项)从loss中单独拿了出来,不参与Adam中一二阶动量的计算。 下面是二者的详细对比: Adam 首先是Adam,给定在迭代步数 t 时模型的参数 [Math] 与梯度 g_t ,Adam的计算公式如下: [公式] 式(1)用于计算梯度的一阶指数滑动平均 式(2)用于计算梯度的二阶项的指数滑动平均 式(3)与(4)对计算得到的指数滑动平均值进行消偏 式(5)为Adam的更新公式,其可以拆成两部分理解:动量更新与自适应学习率。 AdamW AdamW 相对与...

论文地址: 🔖 https://arxiv.org/pdf/2107.11291 代码地址: 前言 一般来说,我们可以把姿态估计任务分成两个流派:Heatmapbased和Regressionbased。 其主要区别在于监督信息的不同,Heatmapbased方法监督模型学习的是高斯概率分布图,即把GroundTruth中每个点渲染成一张高斯热图,最后网络输出为K张特征图对应K个关键点,然后通过argmax或softargmax来获取最大值点作为估计结果。这种方法由于需要渲染高斯热图,且由于热图中的最值点直接对应了结果,不可避免地需要维持一个相对高分辨率的热图(常见的是64x64,再小的话误差下界过大会造成严重的精度损失),因此也就自然而然导致了很大的计算量和内存开销。 Regression...
3D Model
2026-01-11

概述 问题定义 广义的 Gaze Estimation 泛指与眼球、眼动、视线等相关的研究,因此有不少做 saliency 和 egocentric 的论文也以 gaze 为关键词。而本文介绍的 Gaze Estimation 主要以眼睛图像或人脸图像为处理对象,估算人的视线方向或注视点位置, 如下图所示。 gaze角度的表示一般使用一个3d向量作为表示,也可以转换为pitch 和yaw角度,具体可参考 Model Gaze模型一般使用回归模型,所以这里基本只介绍一些在gaze model中使用的小技巧 Rle Loss 实际问题
Computer Vision
2026-01-11
mAP定义及相关概念 mAP: mean Average Precision, 即各类别AP的平均值 AP: PR曲线下面积,后文会详细讲解 PR曲线: PrecisionRecall曲线 Precision: TP / (TP + FP) Recall: TP / (TP + FN) TP: IoU0.5的检测框数量(同一Ground Truth只计算一次) FP: IoU= 0, 0.1, 0.2, ..., 1共11个点时的Precision最大值,然后AP就是这11个Precision的平均值。 在VOC2010及以后,需要针对每一个不同的Recall值(包括0和1),选取其大于等于这些Recall值时的Precision最大值,然后计算PR曲线下面积作为AP值。 mAP计算示例 假...