背景 RLHF 通常包括三个阶段: 有监督微调(SFT) 奖励建模阶段 (Reward Model) RL微调阶段 直接偏好优化(DPO) 传统的RLHF方法分两步走: 1. 先训练一个奖励模型来判断哪个回答更好 1. 然后用强化学习让语言模型去最大化这个奖励 这个过程很复杂,就像绕了一大圈:先学习"什么是好的",再学习"如何做好"。 DPO发现了一个数学上的捷径: 1. 关键发现:对于任何奖励函数,都存在一个对应的最优策略(语言模型);反过来说,任何语言模型也隐含着一个它认为最优的奖励函数 1. 直接优化:与其先训练奖励模型再训练语言模型,不如直接训练语言模型,让它自己内化"什么是好的" 1. 数学转换:DPO将"学习判断好坏"和"学习生成好内容"这两个任务合二为一,通过一个简单的数学变换...
Deep Learning
2026-01-11

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 1、Upsampling(上采样)[没有学习过程] 在FCN、Unet等网络结构中,涉及到了上采样。上采样概念:上采样指的是任何可以让图像变成更高分辨率的技术。最简单的方式是重采样和插值:将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在torch.nn中的Vision Layers里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d 0)PixelShuffl...
Large Model
2026-01-11

模型概述 KimiVL 是一个高效的开源混合专家视觉语言模型(VLM),它提供先进的多模态推理、长上下文理解和强大的代理能力,同时在语言解码器中仅激活 2.8B 参数(KimiVLA3B)。该模型在多种挑战性任务中表现出色,包括一般用途的视觉语言理解、多轮代理任务、大学水平的图像和视频理解、OCR、数学推理和多图像理解等. 模型架构 KimiVL 的架构由三个主要部分组成: MoE语言模型 Moonlight MoE language model with only 2.8B activated (16B total) parameters 视觉模型 400M nativeresolution MoonViT vision encoder. MLP Projector MoonViT: 原生...
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Deep Learning
2026-01-11
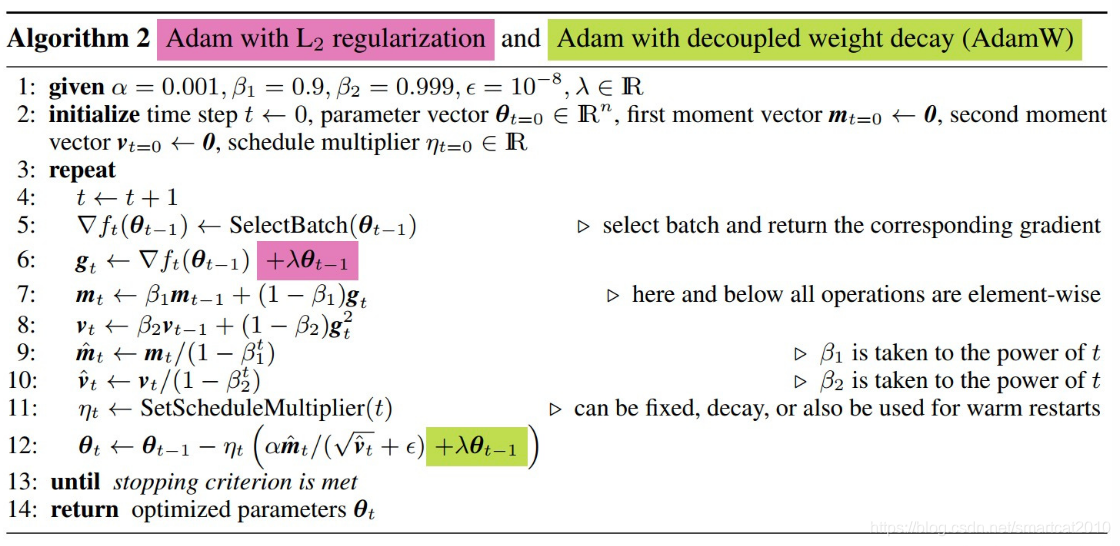
AdamW目前是大语言模型训练的默认优化器,而大部分资料对Adam跟AdamW区别的介绍都不是很明确,在此梳理一下Adam与AdamW的计算流程,明确一下二者的区别。 TLDR:AdamW将优化过程中使用的针对网络权重的衰减项(或者叫正则项)从loss中单独拿了出来,不参与Adam中一二阶动量的计算。 下面是二者的详细对比: Adam 首先是Adam,给定在迭代步数 t 时模型的参数 [Math] 与梯度 g_t ,Adam的计算公式如下: [公式] 式(1)用于计算梯度的一阶指数滑动平均 式(2)用于计算梯度的二阶项的指数滑动平均 式(3)与(4)对计算得到的指数滑动平均值进行消偏 式(5)为Adam的更新公式,其可以拆成两部分理解:动量更新与自适应学习率。 AdamW AdamW 相对与...
Reinforcement Learning
2026-01-11

引言 DDPG同样使用了ActorCritic的结构,Deterministic的确定性策略是和随机策略相对而言的,对于某一些动作集合来说,它可能是连续值,或者非常高维的离散值,这样动作的空间维度极大。如果我们使用随机策略,即像DQN一样研究它所有的可能动作的概率,并计算各个可能的动作的价值的话,那需要的样本量是非常大才可行的。于是有人就想出使用确定性策略来简化这个问题。 作为随机策略,在相同的策略,在同一个状态 s 处,采用的动作 [Math] 是基于一个概率分布的,即是不确定的。而确定性策略则决定简单点,虽然在同一个状态处,采用的动作概率不同,但是最大概率只有一个,如果我们只取最大概率的动作,去掉这个概率分布,那么就简单多了。即作为确定性策略,相同的策略,在同一个状态处,动作是唯一确定的...
问题定义 多元二次多项式,维度为 n ,那么可以用以下公式描述该函数: [Formula] 其中 a_{i,j} 为二次项系数,共有 n^2 项, 1≤i,j≤n ,且所有的 a 不全为0,即 ∃a_{i,j}≠0 ; b_k 为一次项系数,共 n 项, 1≤k≤n ; c 为常数项。 记 f(x)=[x_1,x_2,...,x_n]^T ,则上述函数可以写作二次型的形式: 转化过程中A,b满足: A 为n阶对称方阵, A_{i,j}=a_{i,j} 因为 ∃a_{i,j}≠0 ,A不为零矩阵 b_i=b_i 为了后续计算简便,我们将二次型稍作改动: [Formula] 我们的目标就是寻找该函...
基本概念 方向导数:是一个数;反映的是 f(x,y) 在 P_0 点沿方向 v 的变化率。 偏导数:是多个数(每元有一个);是指多元函数沿坐标轴方向的方向导数,因此二元函数就有两个偏导数。 偏导函数:是一个函数;是一个关于点的偏导数的函数。 梯度:是一个向量;每个元素为函数对一元变量的偏导数;它既有大小(其大小为最大方向导数),也有方向。 方向导数 反映的是 f(x,y) 在 P_0 点沿方向 v 的变化率。 例子如下: 题目 设二元函数 f(x, y) = x^2 + y^2 ,分别计算此函数在点 (1, 2) 沿方向 w=\{3, 4\} 与方向 u=\{1, 0\} 的方向导数。 解: ...
Reinforcement Learning
2026-01-11
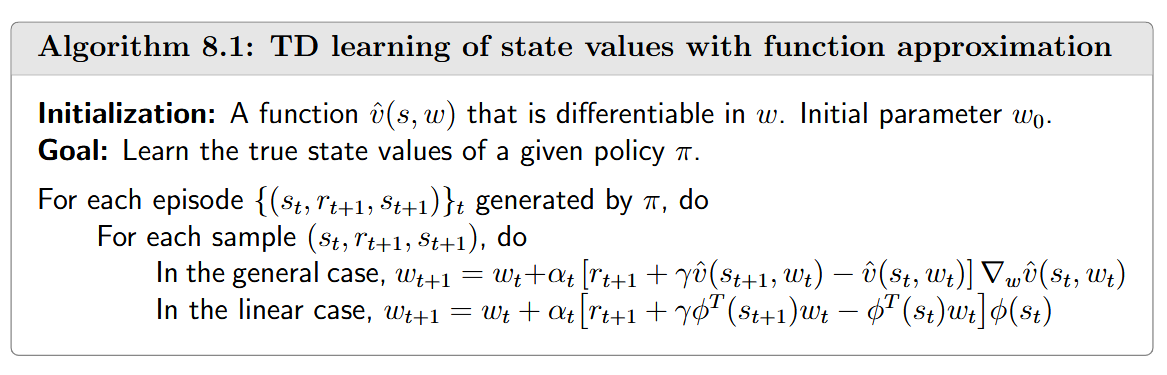
引言与背景 价值函数方法是强化学习中的核心技术,它解决了传统表格方法在处理大型状态或动作空间时的效率问题。本文探讨了从表格表示向函数表示的转变,这是强化学习算法发展的重要里程碑。 在强化学习的发展路径中,价值函数方法位于从基于模型到无模型、从表格表示到函数表示的演进过程中。它结合了时序差分学习的思想,并通过函数近似技术来处理复杂环境。 价值表示:从表格到函数 表格与函数表示的对比 传统的表格方法将状态值存储在一个表格中: 而函数近似方法则使用参数化函数来表示这些值,例如: [公式] 其中 [Math] 称作是状态 s 的特征向量, w 是参数向量。 两种不同的表现形式的区别主要体现在以下几个方面: 值的检索方式 值的更新方式 函数复杂度与近似能力 函数的复杂度决定了其近似的能力: 一阶线性函...
最优策略(Optimal Policy ) 之前在 贝尔曼方程中说过,状态值可以用来评估一个策略是好是坏,这里给出正式的概念: [公式] 那么此时 [Math] 比 [Math] ”更好“ 最优状态值(Optimal State Value): 最优策略(Optimal Policy): 性质: 为了说明上述性质, 我们研究贝尔曼最优方程 Bellman optimality equation(BOE) 贝尔曼最优方程(BOE) 定义 分析最优策略和最优状态值的工具是贝尔曼最优方程(BOE)。通过求解此方程,我们可以获得最优策略和最优状态值。 对于每个 s∈S ,BOE 的elementwise表达式为: [公式] 其中, v(s) 和 [Math] 是待求解的未知变量, π(s) 表示状态...
Reinforcement Learning
2026-01-11

概述与理论背景 ActorCritic方法是强化学习中的一类重要算法,它巧妙地结合了基于策略(policybased)和基于价值(valuebased)的方法。在这种结构中,"Actor"指策略更新步骤,负责根据策略执行动作;而"Critic"指价值更新步骤,负责评估Actor的表现。从另一个角度看,ActorCritic方法本质上仍是策略梯度算法,可以通过扩展策略梯度算法获得。 ActorCritic方法在强化学习中的位置非常重要,它既保留了策略梯度方法直接优化策略的优势,又利用了值函数方法的效率。这种结合使得ActorCritic方法成为解决复杂强化学习问题的强大工具。 最简单的ActorCritic算法(QAC) QAC算法通过扩展策略梯度方法得到。策略梯度方法的核心思想是通过最大化标...
Reinforcement Learning
2026-01-11
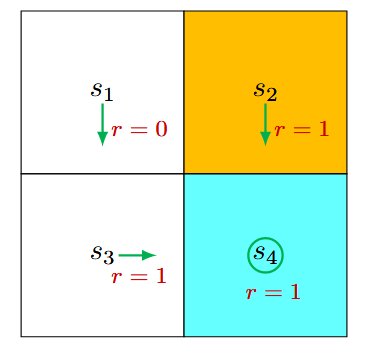
状态价值(State values) 定义 状态价值是强化学习中的核心概念,用于衡量Agent从某个状态出发、遵循特定策略后所能获得的期望回报。 数学表达为: [公式] 其中: [Math] :状态 s 的状态价值函数(statevalue function) 或者简称为 状态价值(state value); [Math] :智能体遵循的策略; [Math] :从当前时间步 t 开始的折扣回报; [Math] :折扣因子,用于平衡即时奖励和未来奖励。 状态价值的特点 依赖于状态 s :状态价值是条件期望,条件是智能体从状态 s 开始。 依赖于策略 [Math] :不同策略会生成不同的轨迹,从而影响状态价值。 与时间步无关:状态价值是一个固定值,与当前时间步 t 无关。 代表一个状态的价值。如...