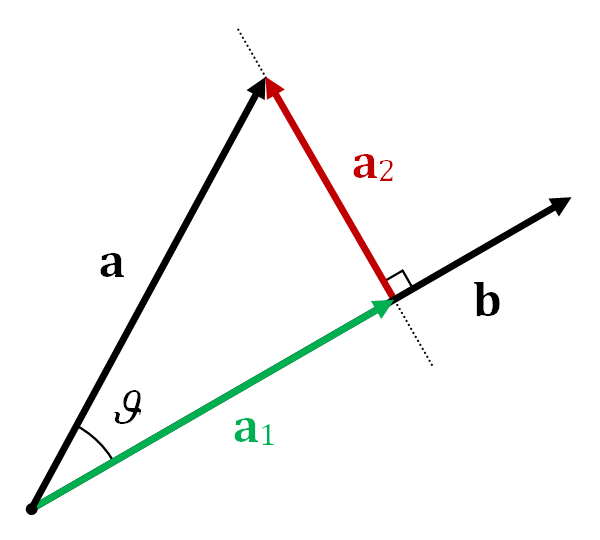
对于向量的三维旋转问题,给定旋转轴和旋转角度,用罗德里格斯(Rodrigues)旋转公式可以得出旋转后的向量。另外,罗德里格斯旋转公式可以用旋转矩阵表示,即将三维旋转的轴-角(axis-angle)表示转变为旋转矩阵表示。 向量投影(Vector projection) 向量 \(a\) 在非零向量 \(b\) 上的向量投影指的是 \(a\) 在平行于向量 \(b\) 的直线上的正交投影。结果是一个平行于 \(b\) 的向量,定义为 \(\mathbf{a}_1=a_1\hat{\mathbf{b}}\) ,其中, \(\mathbf{a}_1\) 是一个标量,称为 \(a\) 在 \(b\) 上的标量投影, \(\hat{\mathbf{b}}\) 是与 \(b \) 同向的单位向量。 \(a_1=\left\Vert\mathbf{a}\right\Vert\cos\theta=\mathbf{a}\cdot \hat{\mathbf{b}}=\mathbf{a}\cdot\frac{\mathbf{b}}{\left\Vert\mathbf{b}\right\Vert}\)...
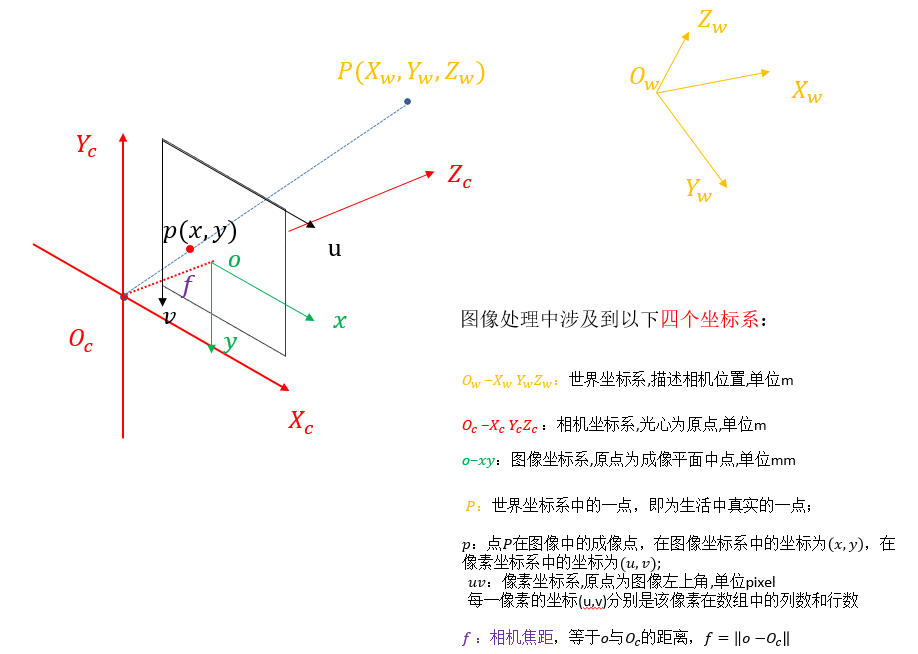
为什么要进行相机标定? 先说结论: 建立相机成像几何模型并矫正透镜畸变 。 建立相机成像几何模型 :计算机视觉的首要任务就是要通过拍摄到的图像信息获取到物体在真实三维世界里相对应的信息,于是,建立物体从三维世界映射到相机成像平面这一过程中的几何模型就显得尤为重要,而这一过程最关键的部分就是要得到相机的 内参和外参 (后文有具体解释)。 矫正透镜畸变 :我们最开始接触到的成像方面的知识应该是有关小孔成像的,但是由于这种成像方式只有小孔部分能透过光线就会导致物体的成像亮度很低,于是聪明的人类发明了透镜。虽然亮度问题解决了,但是新的问题又来了:由于透镜的制造工艺,会使成像产生多种形式的 畸变, 于是为了去除畸变(使成像后的图像与真实世界的景象保持一致),人们计算并利用 畸变系数 来矫正这种像差。(虽然理论上可以设计出不产生畸变的透镜,但其制造工艺相对于球面透镜会复杂很多,so相对于复杂且高成本的制造工艺,人们更喜欢用脑子来解决……) 相机标定的原理...

问题:两条平行线可以相交于一点 在欧氏几何空间,同一平面的两条平行线不能相交,这是我们都熟悉的一种场景。 然而,在透视空间里面,两条平行线可以相交,例如:火车轨道随着我们的视线越来越窄,最后两条平行线在无穷远处交于一点。 欧氏空间(或者笛卡尔空间)描述2D/3D几何非常适合,但是这种方法却不适合处理透视空间的问题(实际上,欧氏几何是透视几何的一个子集合),2维笛卡尔坐标可以表示为 \((x,y)\) 。 如果一个点在无穷远处,这个点的坐标将会 \((∞,∞)\) ,在欧氏空间,这变得没有意义。 平行线在透视空间的无穷远处交于一点,但是在欧氏空间却不能,数学家发现了一种方式来解决这个问题。 方法:齐次坐标 简而言之,齐次坐标就是用 \(N+1\) 维来代表 \(N\) 维坐标 我们可以在一个2D笛卡尔坐标末尾加上一个额外的变量 \(w\) 来形成2D齐次坐标,因此,一个点 \((X,Y)\) 在齐次坐标里面变成了 \((x,y,w)\) ,并且有 \[X = \frac{x}{w} \qquad Y = \frac{y}{w}\] 例如,笛卡尔坐标系下 \((1,2)\)...