Computer Vision
2026-04-15
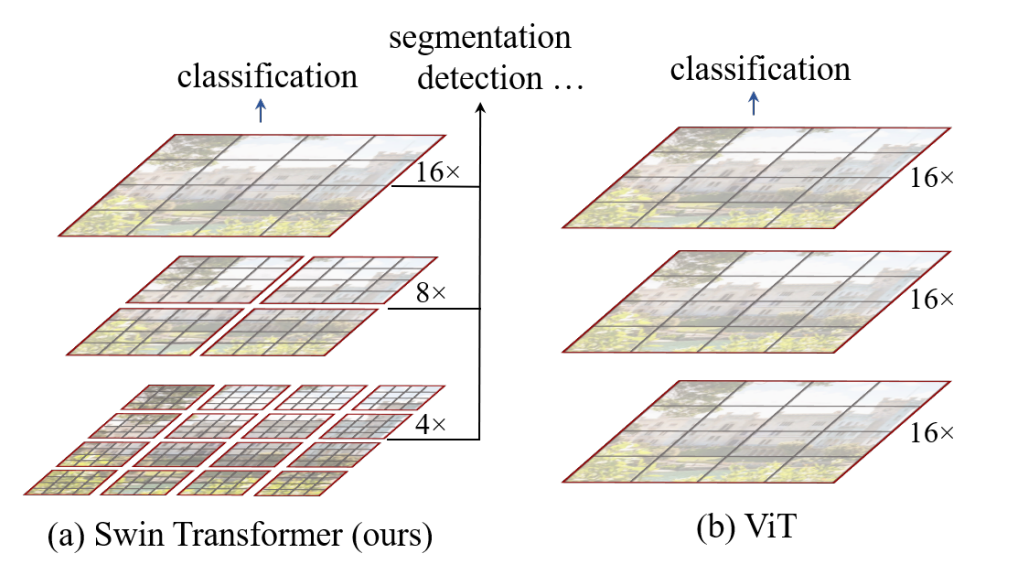
前言 首先看论文题目。Swin Transformer: Hierarchical Vision Transformer using Shifted Windows。即:Swin Transformer是一个用了移动窗口的层级式Vision Transformer 所以Swin来自于 Shifted Windows , 它能够使Vision Transformer像卷积神经网络一样,做层级式的特征提取,这样提取出来的特征具有多尺度的概念 ,这也是 Swin Transformer这篇论文的主要贡献。 标准的Transformer直接用到视觉领域有一些挑战,即: 多尺度问题:比如一张图片里的各种物体尺度不统一,NLP中没有这个问题; 分辨率太大:如果将图片的每一个像素值当作一个token直接输入Transformer,计算量太大,不利于在多种机器视觉任务中的应用。 基于这两点,本文提出了 hierarchical Transformer,通过移动窗口来学习特征。 移动窗口学习,即只在滑动窗口内部计算自注意力,所以称为W-MSA(Window Multi-Self-Attention)。...