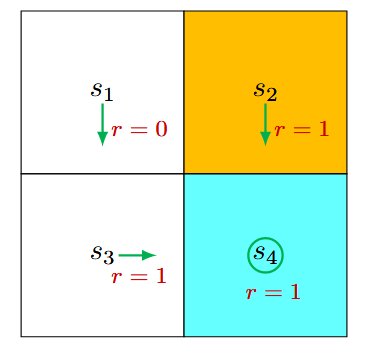
最优策略(Optimal Policy ) 之前在 贝尔曼方程中说过,状态值可以用来评估一个策略是好是坏,这里给出正式的概念: [公式] 那么此时 [Math] 比 [Math] ”更好“ 最优状态值(Optimal State Value): 最优策略(Optimal Policy): 性质: 为了说明上述性质, 我们研究贝尔曼最优方程 Bellman optimality equation(BOE) 贝尔曼最优方程(BOE) 定义 分析最优策略和最优状态值的工具是贝尔曼最优方程(BOE)。通过求解此方程,我们可以获得最优策略和最优状态值。 对于每个 s∈S ,BOE 的elementwise表达式为: [公式] 其中, v(s) 和 [Math] 是待求解的未知变量, π(s) 表示状态...
Large Model
2026-01-11
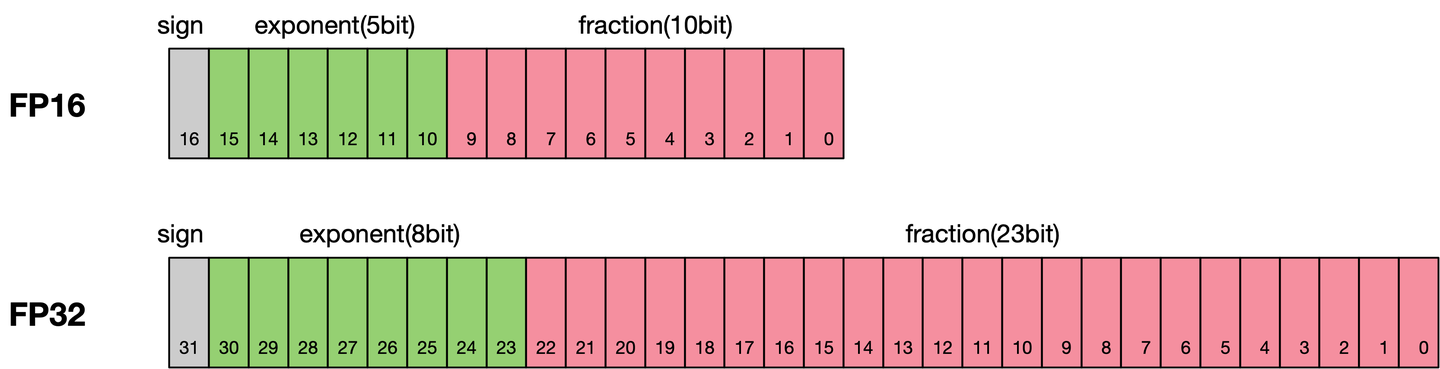
通常我们训练神经网络模型的时候默认使用的数据类型为单精度FP32。近年来,为了加快训练时间、减少网络训练时候所占用的内存,并且保存训练出来的模型精度持平的条件下,业界提出越来越多的混合精度训练的方法。这里的混合精度训练是指在训练的过程中,同时使用单精度(FP32)和半精度(FP16)。 浮点数据类型 浮点数据类型主要分为双精度(FP64)、单精度(FP32)、半精度(FP16)。在神经网络模型的训练过程中,一般默认采用单精度(FP32)浮点数据类型,来表示网络模型权重和其他参数。在了解混合精度训练之前,这里简单了解浮点数据类型。 根据IEEE二进制浮点数算术标准(IEEE 754)的定义,浮点数据类型分为双精度(FP64)、单精度(FP32)、半精度(FP16)三种,其中每一种都有三个不同的...
NLP
2026-01-11
问题引入 前几天在训练一个新的Transformer模型的时候,发现怎么训都不收敛了。经过一番debug,发现是在做Self Attention的时候 [Math] 之后忘记除以 [Math] 了,于是重新温习了一下为什么除以 [Math] 如此重要的原因。当然,Google的T5确实是没有除以 [Math] 的,但它依然能够正常收敛,那是因为它在初始化策略上做了些调整,所以这个事情还跟初始化有关。 藉着这个机会,本文跟大家一起梳理一下模型的初始化、参数化和标准化等内容,相关讨论将主要以Transformer为心中展开。 参数初始化 采样分布 初始化自然是随机采样的的,所以这里先介绍一下常用的采样分布。一般情况下,我们都是从指定均值和方差的随机分布中进行采样来初始化。其中常用的随机分布有三个...
Reinforcement Learning
2026-01-11

概述与理论背景 ActorCritic方法是强化学习中的一类重要算法,它巧妙地结合了基于策略(policybased)和基于价值(valuebased)的方法。在这种结构中,"Actor"指策略更新步骤,负责根据策略执行动作;而"Critic"指价值更新步骤,负责评估Actor的表现。从另一个角度看,ActorCritic方法本质上仍是策略梯度算法,可以通过扩展策略梯度算法获得。 ActorCritic方法在强化学习中的位置非常重要,它既保留了策略梯度方法直接优化策略的优势,又利用了值函数方法的效率。这种结合使得ActorCritic方法成为解决复杂强化学习问题的强大工具。 最简单的ActorCritic算法(QAC) QAC算法通过扩展策略梯度方法得到。策略梯度方法的核心思想是通过最大化标...
Reinforcement Learning
2026-01-11
状态价值(State values) 定义 状态价值是强化学习中的核心概念,用于衡量Agent从某个状态出发、遵循特定策略后所能获得的期望回报。 数学表达为: [公式] 其中: [Math] :状态 s 的状态价值函数(statevalue function) 或者简称为 状态价值(state value); [Math] :智能体遵循的策略; [Math] :从当前时间步 t 开始的折扣回报; [Math] :折扣因子,用于平衡即时奖励和未来奖励。 状态价值的特点 依赖于状态 s :状态价值是条件期望,条件是智能体从状态 s 开始。 依赖于策略 [Math] :不同策略会生成不同的轨迹,从而影响状态价值。 与时间步无关:状态价值是一个固定值,与当前时间步 t 无关。 代表一个状态的价值。如...
Large Model
2026-01-11

概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 D = \{(x_i, y^_i)\}_{i=1}^n ,其中包含问题 x_i 和对应的真实答案 y^_i ,目标是训练一个策略模型 [Math] 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 z = (z_1, z_2, ..., z_m) 来连接问题 x 和答案 y ,每个 z_i 是解决问题的重要中间步骤。 当解决问题 x 时,思维 [Math] 被自回归采样,最终答案 [Math] 。 强化学习目标 基于真实答案 y^ ,分配一个值 [Math] , Ki...
Deep Learning
2026-01-11

简短总结 混合专家模型 (MoEs): 与稠密模型相比, 预训练速度更快 与具有相同参数数量的模型相比,具有更快的 推理速度 需要 大量显存,因为所有专家系统都需要加载到内存中 在 微调方面存在诸多挑战,但 近期的研究 表明,对混合专家模型进行 指令调优具有很大的潜力。 什么是混合专家模型? 模型规模是提升模型性能的关键因素之一。在有限的计算资源预算下,用更少的训练步数训练一个更大的模型,往往比用更多的步数训练一个较小的模型效果更佳。 混合专家模型 (MoE) 的一个显著优势是它们能够在远少于稠密模型所需的计算资源下进行有效的预训练。这意味着在相同的计算预算条件下,您可以显著扩大模型或数据集的...
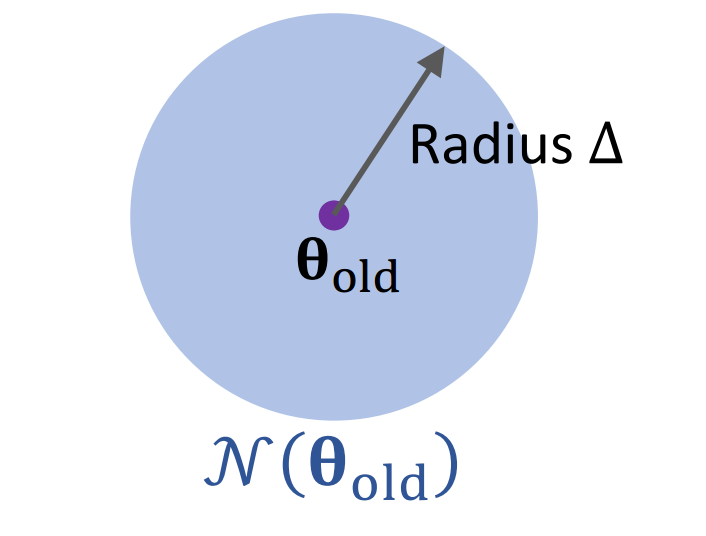
💡 引言 Trust Region Policy Optimization (TRPO) 是2015年的ICML会议上提出的一种强大的基于策略的强化学习算法。TRPO 解决了传统策略梯度方法中的一些关键问题,特别是训练不稳定和步长选择困难的问题。与传统策略梯度算法相比,TRPO 具有更高的稳健性和样本效率,能够在复杂环境中取得更好的性能。 优化基础 在深入了解 TRPO 之前,我们需要先简单回顾一些优化方法的基础知识。 梯度上升法 梯度上升法是一种迭代优化算法,用于寻找函数的局部最大值。 目标:找到使目标函数 [Math] 最大化的参数 [Math] : [公式] 梯度上升迭代过程: 1. 在当前参数 [Math] 处计算梯度: [Math] 1. 更新参数: 梯度上升法的主要问题是学习率的...
NLP
2026-01-11

概述 众所周知,尽管基于Attention机制的Transformer类模型有着良好的并行性能,但它的空间和时间复杂度都是 [Math] 级别的, n 是序列长度,所以当 n 比较大时Transformer模型的计算量难以承受。近来,也有不少工作致力于降低Transformer模型的计算量,比如模型剪枝、量化、蒸馏等精简技术,又或者修改Attention结构,使得其复杂度能降低到 [Math] 甚至 [Math] 。 改变这一复杂度的思路主要有两种: 一是走稀疏化的思路,比如OpenAI的Sparse Attention,通过“只保留小区域内的数值、强制让大部分注意力为零”的方式,来减少Attention的计算量。经过特殊设计之后,Attention矩阵的大部分元素都是0,因此理论上它也能节...