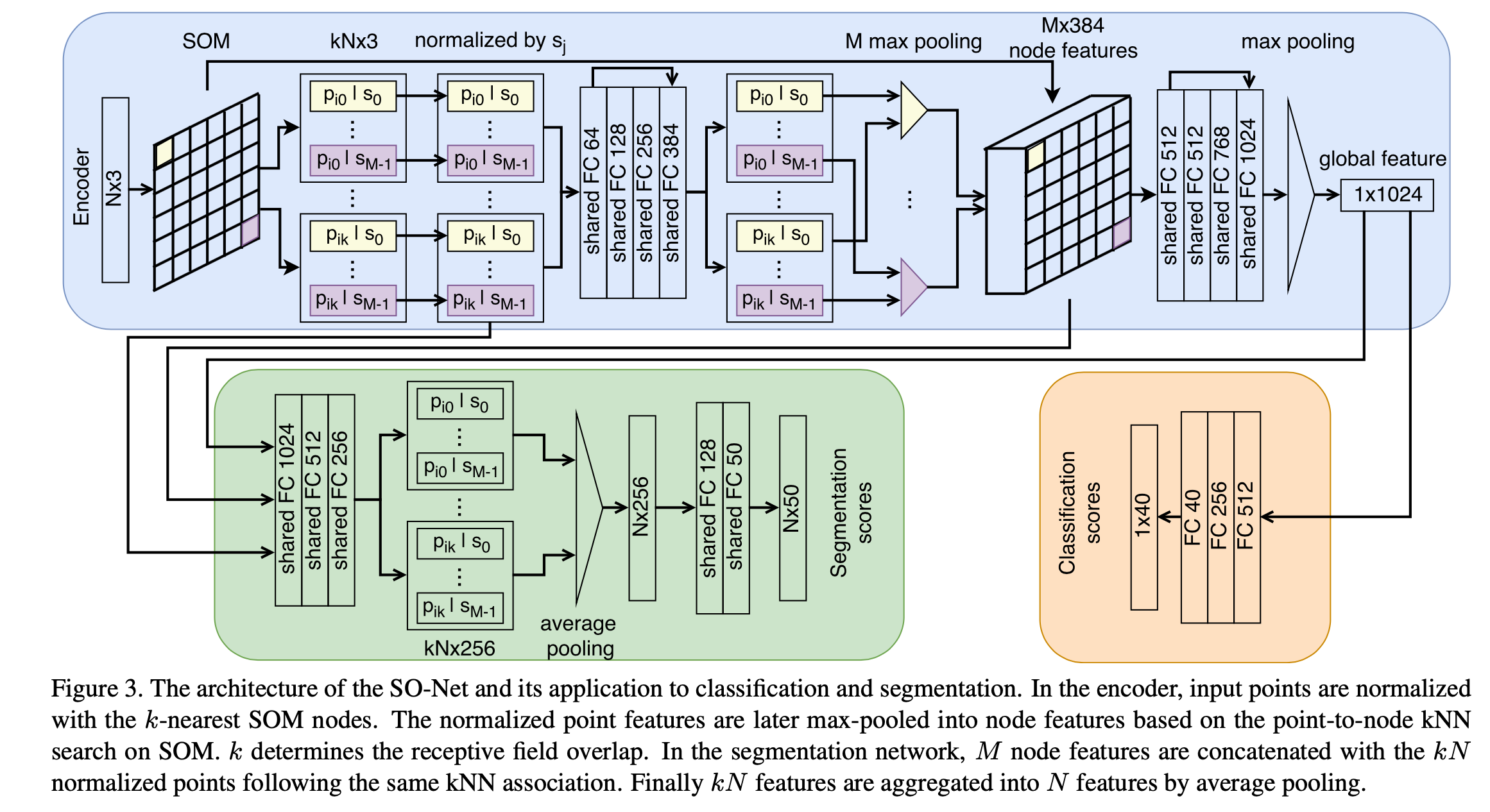
概括 针对一些网络在处理point cloud时的缺点,如:不能对点的空间分布进行建模(例如PointNet++,只是能获取局部信息不能得到局部区域之间的空间关系),提出了SONet。SO的含义是利用Selforganizing map的Net。 结果:它具有能够对点的空间分布进行建模、层次化特征提取、可调节的感受野范围的优点,并能够用于多种任务如重建、分类、分割等等。取得了相似或超过SOTA的性能,因为可并行化和架构简单使得训练速度很快。 贡献: TODO IDEA:作者发现将CNN直接用于SOM图上性能不升反降,为什么(推测:可能是SOM的2D map并不是保持了原本的空间对应关系,可能nodes之间是乱序的,导致用conv2d时精度反而降低)? 难点 如何对local regions之...
3D Model
2026-01-11
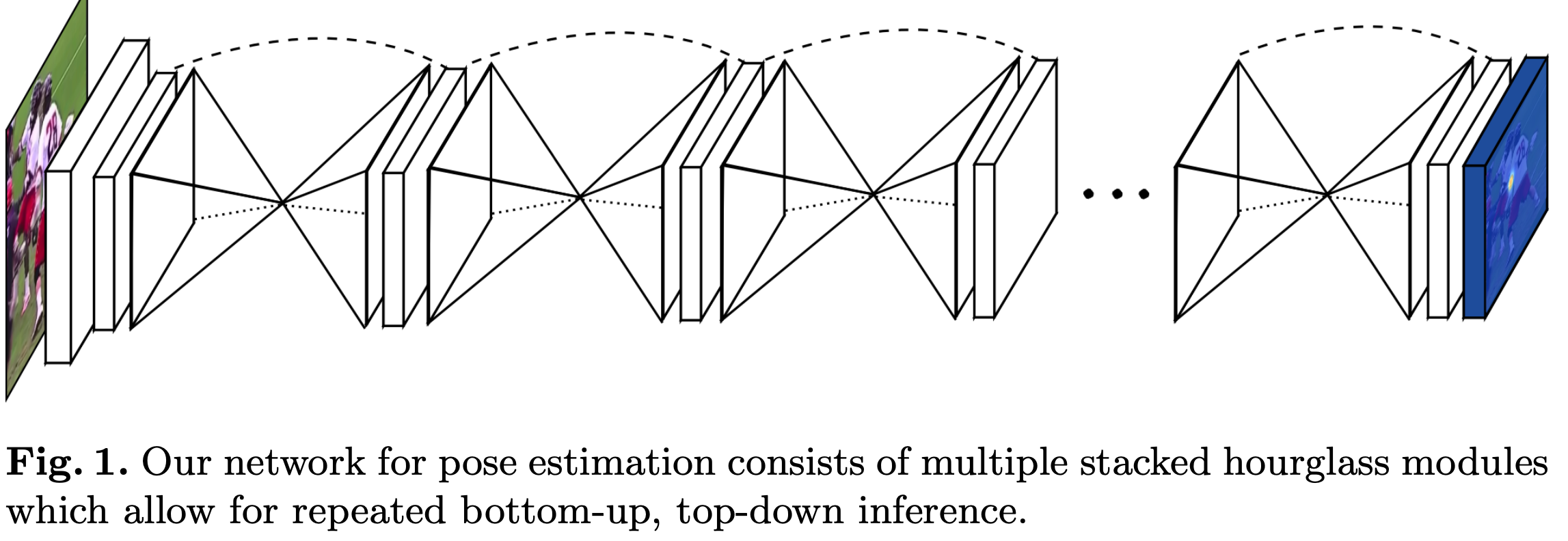
论文介绍了一种新的网络结构用于人体姿态检测,作者在论文中展现了不断重复bottomup、topdown过程以及运用intermediate supervison(中间监督)对于网络性能的提升,下面来介绍Stacked Hourglass Networks. 简介 理解人类的姿态对于一些高级的任务比如行为识别来说特别重要,而且也是一些人机交互任务的基础。作者提出了一种新的网络结构Stacked Hourglass Networks来对人体的姿态进行识别,这个网络结构能够捕获并整合图像所有尺度的信息。之所以称这种网络为Stacked Hourglass Networks,主要是它长得很像堆叠起来的沙漏,如下图所示: 这种堆叠在一起的Hourglass模块结构是对称的,bottomup过程将图片从...
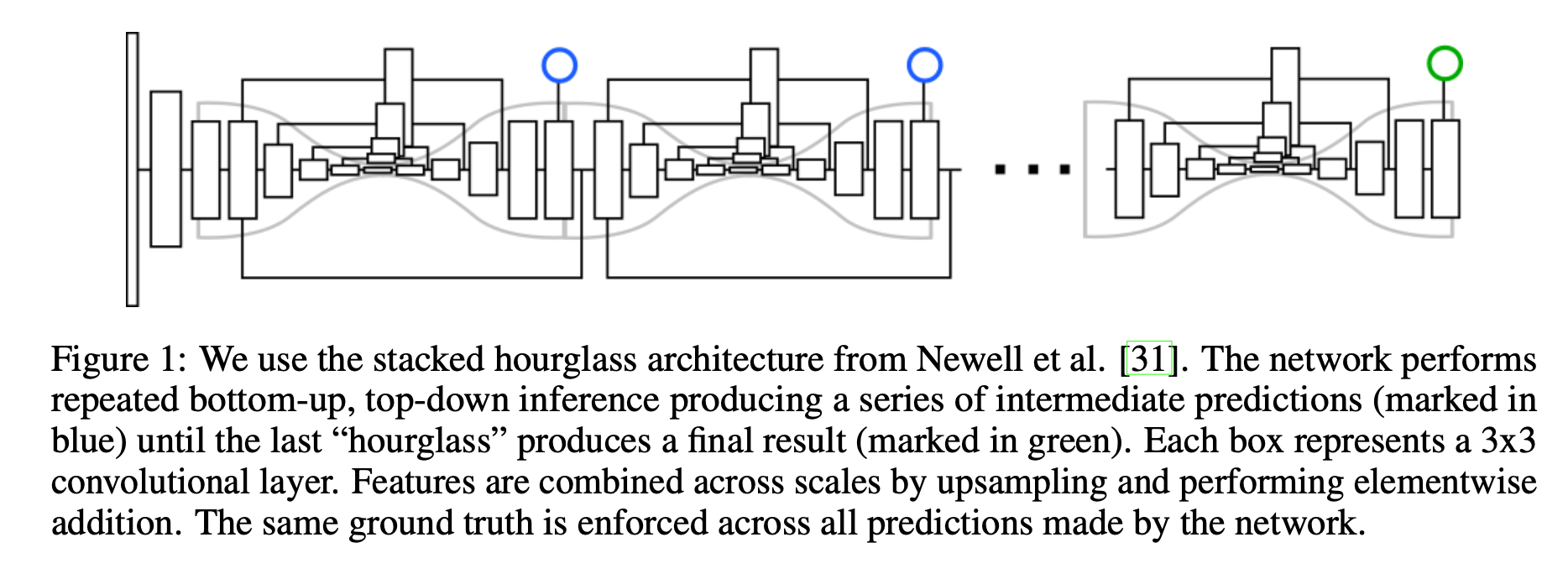
简介 作者认为许多计算机视觉的任务可以看作是检测和分组问题检测一些小的单元,然后将它们组合成更大的单元,例如,多人目标检测可以通过检测人的关节点然后再将它们进行分组(属于同一个人的关节点为一组)解决;实例分割问题可以看作是检测一些相关的像素然后将它们组合成一个目标实例。 Associative Embedding是一种表示关节检测和分组任务的输出的新方法,其基本思想是为每次检测引入一个实数,用作识别对象所属组的“tag”,换句话说,标签将每个检测与同一组中的其他检测相关联。作者使用一个损失函数使得如果相应的检测属于ground truth中的相同组则促使这一对标签具有相似的值。需要注意的是,这里标签具体的值并不重要,重要的是不同标签之间的差异。 这篇其实是源自Stacked Hourglas...
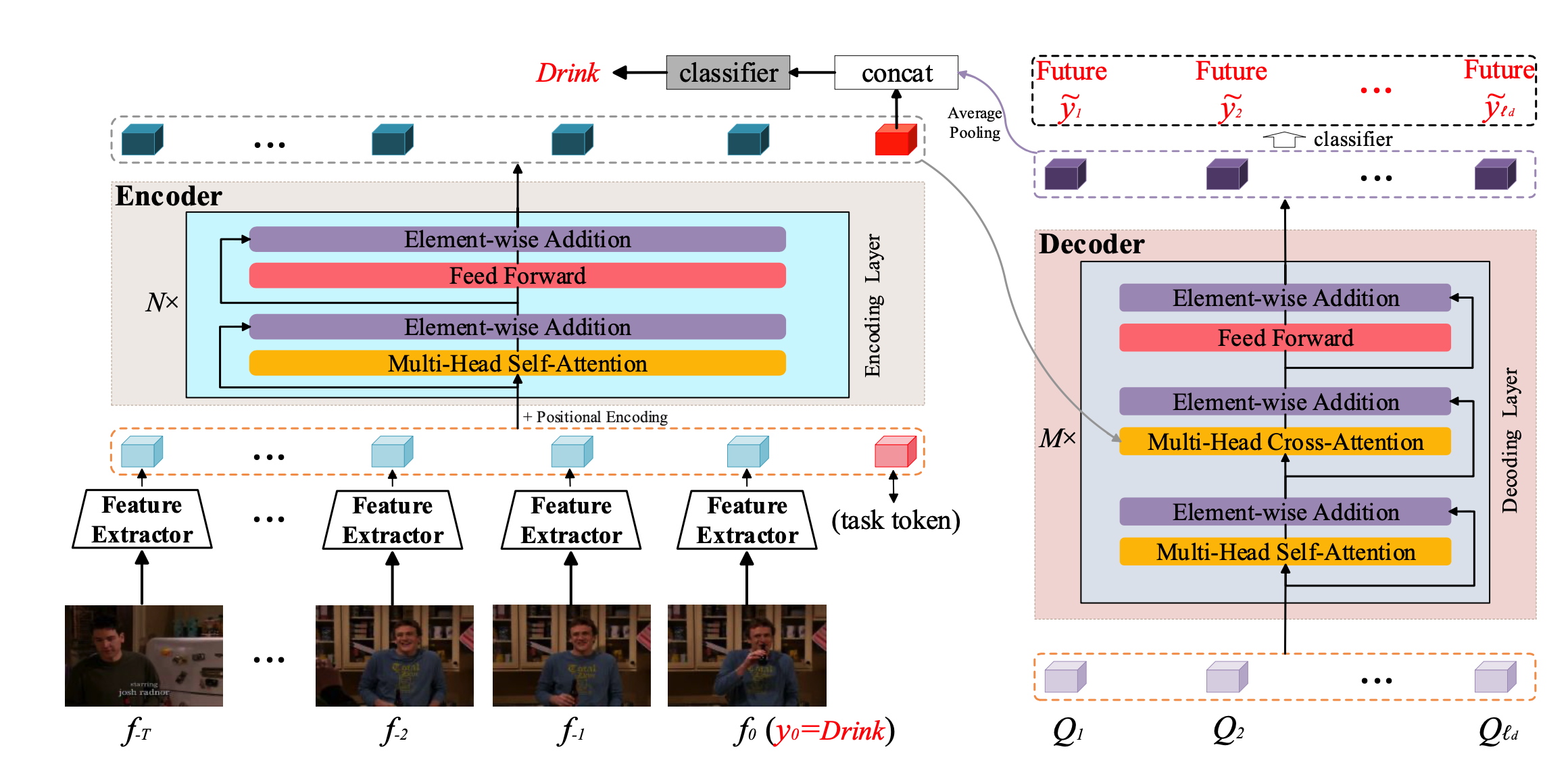
简介 之前的很多方法都是用RNN的结构去构建时序上的依赖关系,但是RNN的结构的缺点是不能并行操作,且存在梯度消失的现象。所以本文就是将之前的RNN的结构改为Transfomer的形式。延续了之前TRN的整个网络的框架,也是结合了对未来帧的预测与历史帧的表示相结合来对当前的动作进行预测。 方法 整个网络框架如上图所示, Encoder就是利用transfomer对longrange的历史和目前帧进行特征表示,其中要说明的一个点就是,这里的特征空间包含T个历史特征,当前窗口的特征以及一个task token,这个task token的作用可以从下图看出来 这幅图对比的是输入进classifier的特征与网络输入的特征的相似性,可以看出w/o task token 对应的是当前t=0时刻的特征,...
3D Model
2026-01-11

整体流程: [代码] 0. 数据预处理 这个步骤主要是crop四路数据,及生成后续步骤所需要的yaml文件。 1. 四路相机与双路相机标定 内参标定 [代码] 这里主要的函数就是: pts = cv2.findChessboardCorners(img, (board_width, board_height))[1] cv2.cornerSubPix(gray, pts, (12, 12), (1, 1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)) det, intr, dist, _, _ = cv2.calibrateCamera(obj_pts, img_pts, self.imgSize, None, No...
Deep Learning
2026-01-11
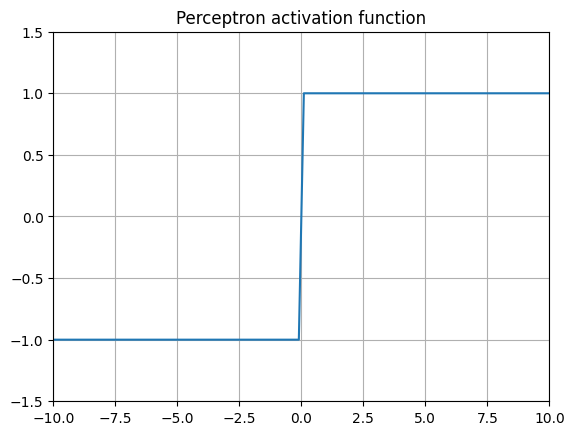
最近,似乎现在每个大型语言模型(LLM)和新闻中提到的复杂神经网络架构都使用略有不同的激活函数,而就在几年前,最常见的做法只是在神经网络的内部层中使用 ReLU。 曾经优秀的 ReLUs 怎么了,以及是什么促使最新的大型语言模型(LLMs)的创造者们开始使用不同的(更高级的)激活函数? Threshold activation (Perceptron) 1957 年,罗森布拉特建造了“感知机” 最古老的激活函数是基本感知器。它由芝加哥大学精神病学系的爱德华·麦克洛奇和沃尔特·皮茨构思,后来由弗兰克·罗森布拉特在 1957 年于康奈尔航空实验室为美国海军在硬件上更著名地实现了。该算法非常简单,其基本规则是:如果某个值超过某个阈值,则返回 1,否则返回 0。有些变体会返回 1 或1。 由于其二元...
NLP
2026-01-11

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了Transformer。Transformer 是Google Brain 2017的提出的一篇工...
Deep Learning
2026-01-11

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 X ,其取值来自有限集合 [Math] 。我们的目标是估计 E[X] 。假设我们有一个独立同分布的样本序列 \{x_i\}_{i=1}^n ,那么 X 的期望值可以近似为: [公式] 非增量方法与增量方法 非增量方法:先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法:定义 [公式] 可以推导出递归公式: [公式] 这个算法可以增量式地...
Generative Model
2026-01-11

SD模型原理 SD是CompVis、Stability AI和LAION等公司研发的一个文生图模型,它的模型和代码是开源的,而且训练数据LAION5B也是开源的。SD在开源90天github仓库就收获了33K的stars,可见这个模型是多受欢迎。 SD是一个基于latent的扩散模型,它在UNet中引入text condition来实现基于文本生成图像。SD的核心来源于Latent Diffusion这个工作,常规的扩散模型是基于pixel的生成模型,而Latent Diffusion是基于latent的生成模型,它先采用一个autoencoder将图像压缩到latent空间,然后用扩散模型来生成图像的latents,最后送入autoencoder的decoder模块就可以得到生成的图像。 ...
Reinforcement Learning
2026-01-11

引言与背景 蒙特卡洛方法是强化学习中的重要算法类别,它标志着从基于模型到无模型算法的转变。这类算法不依赖环境模型,而是通过与环境的直接交互获取经验数据来学习最优策略。 蒙特卡洛方法在强化学习算法谱系中处于"无模型"方法的起始位置,是从基于模型的方法(如值迭代和策略迭代)向无模型方法过渡的第一步。 无模型强化学习的核心理念可以简述为:如果没有模型,我们必须有数据;如果没有数据,我们必须有模型;如果两者都没有,我们就无法找到最优策略。在强化学习中,"数据"通常指智能体与环境交互的经验。 均值估计问题 在介绍蒙特卡洛强化学习算法之前,我们首先需要理解均值估计问题,这是理解从数据而非模型中学习的基础。 考虑一个可以取有限实数集合 X 中值的随机变量 X ,我们的任务是计算 X 的均值或期望值: E[...
Reinforcement Learning
2026-01-11

基础概念 GridWord Example 环境描述:网格世界是一个直观的二维环境,包含: 任务目标: 什么是强化学习:依据策略执行动作感知状态得到奖励 所谓强化学习(Reinforcement Learning,简称RL),是指基于智能体在复杂、不确定的环境中最大化它能获得的奖励,从而达到自主决策的目的。 a computational approach to learning whereby an agent tries to maximize the total amount of reward it receives while interacting with a complex and uncertain environment 经典的强化学习模型可以总结为下图的形式(你可以理解...