Large Model
2026-03-10
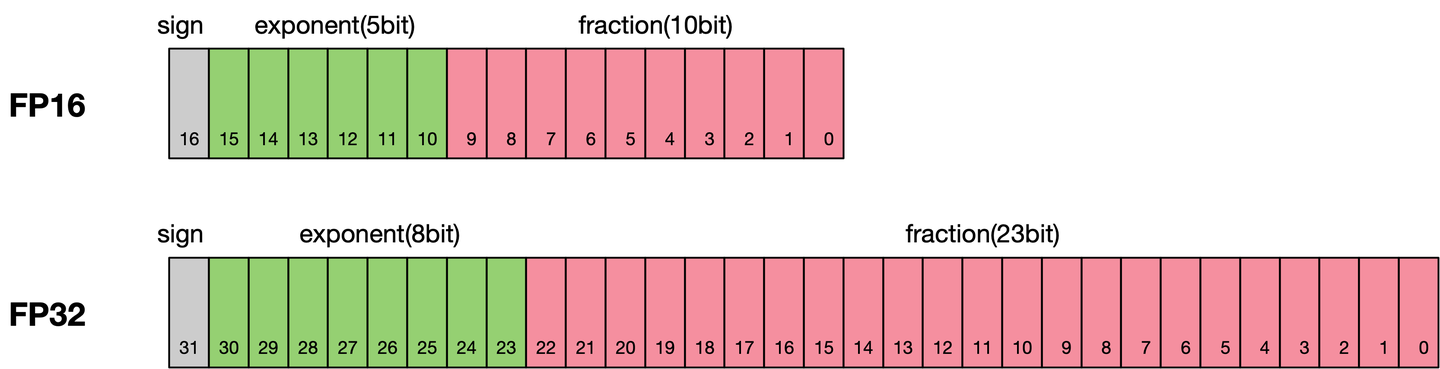
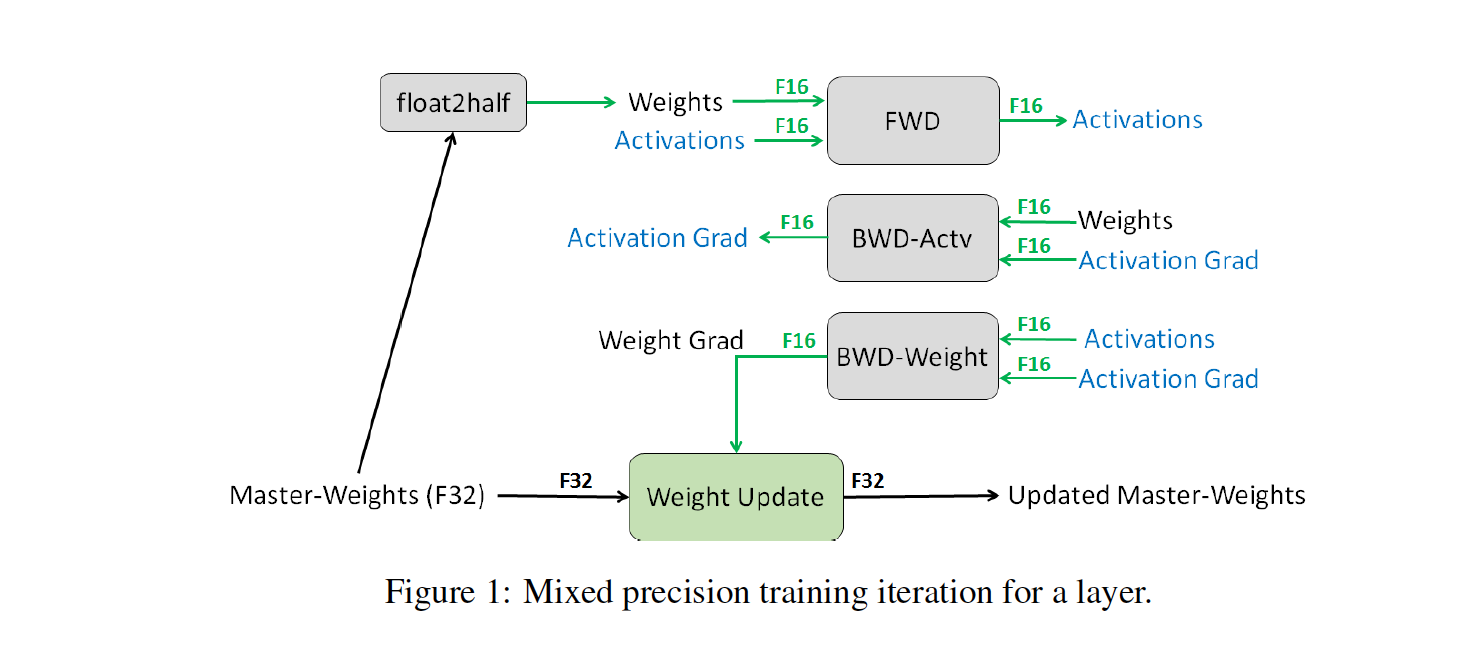
通常我们训练神经网络模型的时候默认使用的数据类型为单精度FP32。近年来,为了加快训练时间、减少网络训练时候所占用的内存,并且保存训练出来的模型精度持平的条件下,业界提出越来越多的混合精度训练的方法。 这里的混合精度训练是指在训练的过程中,同时使用单精度(FP32)和半精度(FP16) 。 浮点数据类型 浮点数据类型主要分为双精度(FP64)、单精度(FP32)、半精度(FP16)。在神经网络模型的训练过程中,一般默认采用单精度(FP32)浮点数据类型,来表示网络模型权重和其他参数。在了解混合精度训练之前,这里简单了解浮点数据类型。 根据IEEE二进制浮点数算术标准(IEEE 754)的定义,浮点数据类型分为双精度(FP64)、单精度(FP32)、半精度(FP16)三种,其中每一种都有三个不同的位来表示。 FP64表示采用8个字节共64位,来进行的编码存储的一种数据类型; FP32表示采用4个字节共32位来表示; FP16则是采用2字节共16位来表示。 如图所示: 从图中可以看出,与FP32相比,FP16的存储空间是FP32的一半,FP32则是FP16的一半。主要分为三个部分:...