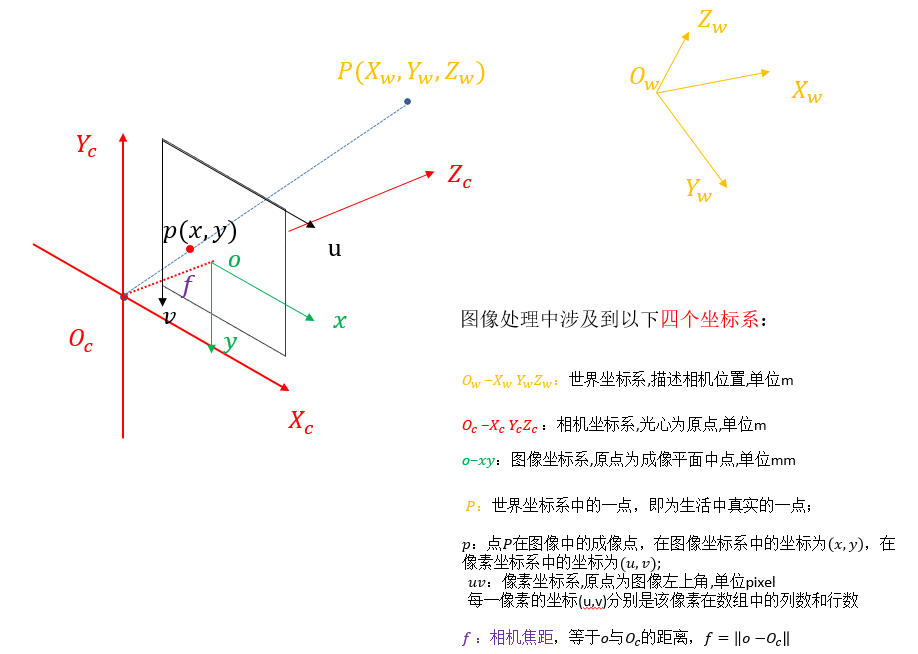
为什么要进行相机标定? 先说结论: 建立相机成像几何模型并矫正透镜畸变 。 建立相机成像几何模型 :计算机视觉的首要任务就是要通过拍摄到的图像信息获取到物体在真实三维世界里相对应的信息,于是,建立物体从三维世界映射到相机成像平面这一过程中的几何模型就显得尤为重要,而这一过程最关键的部分就是要得到相机的 内参和外参 (后文有具体解释)。 矫正透镜畸变 :我们最开始接触到的成像方面的知识应该是有关小孔成像的,但是由于这种成像方式只有小孔部分能透过光线就会导致物体的成像亮度很低,于是聪明的人类发明了透镜。虽然亮度问题解决了,但是新的问题又来了:由于透镜的制造工艺,会使成像产生多种形式的 畸变, 于是为了去除畸变(使成像后的图像与真实世界的景象保持一致),人们计算并利用 畸变系数 来矫正这种像差。(虽然理论上可以设计出不产生畸变的透镜,但其制造工艺相对于球面透镜会复杂很多,so相对于复杂且高成本的制造工艺,人们更喜欢用脑子来解决……) 相机标定的原理...

问题:两条平行线可以相交于一点 在欧氏几何空间,同一平面的两条平行线不能相交,这是我们都熟悉的一种场景。 然而,在透视空间里面,两条平行线可以相交,例如:火车轨道随着我们的视线越来越窄,最后两条平行线在无穷远处交于一点。 欧氏空间(或者笛卡尔空间)描述2D/3D几何非常适合,但是这种方法却不适合处理透视空间的问题(实际上,欧氏几何是透视几何的一个子集合),2维笛卡尔坐标可以表示为 \((x,y)\) 。 如果一个点在无穷远处,这个点的坐标将会 \((∞,∞)\) ,在欧氏空间,这变得没有意义。 平行线在透视空间的无穷远处交于一点,但是在欧氏空间却不能,数学家发现了一种方式来解决这个问题。 方法:齐次坐标 简而言之,齐次坐标就是用 \(N+1\) 维来代表 \(N\) 维坐标 我们可以在一个2D笛卡尔坐标末尾加上一个额外的变量 \(w\) 来形成2D齐次坐标,因此,一个点 \((X,Y)\) 在齐次坐标里面变成了 \((x,y,w)\) ,并且有 \[X = \frac{x}{w} \qquad Y = \frac{y}{w}\] 例如,笛卡尔坐标系下 \((1,2)\)...
Deep Learning
2026-01-22

文章从连续情形出发开始介绍重参数,主要的例子是正态分布的重参数;然后引入离散分布的重参数,这就涉及到了Gumbel Softmax,包括Gumbel Softmax的一些证明和讨论;最后再讲讲重参数背后的一些故事,这主要跟梯度估计有关。 基本概念 重参数(Reparameterization) 实际上是处理如下期望形式的目标函数的一种技巧: \[L_{\theta}=\mathbb{E}_{z\sim p_{\theta}(z)}[f(z)]\tag{1}\] 这样的目标在VAE中会出现,在文本GAN也会出现,在强化学习中也会出现( \(f(z)\) 对应于奖励函数),所以深究下去,我们会经常碰到这样的目标函数。取决于 \(z\) 的连续性,它对应不同的形式: \[\int p_{\theta}(z) f(z)dz\,\,\,\text{(连续情形)}\qquad\qquad \sum_{z} p_{\theta}(z) f(z)\,\,\,\text{(离散情形)}\tag{2}\] 当然,离散情况下我们更喜欢将记号 \(z\) 换成 \(y\) 或者 \(c\) 。 为了最小化...
Generative Model
2026-01-18

2022年中旬,以扩散模型为核心的图像生成模型将AI绘画带入了大众的视野。实际上,在更早的一年之前,就有了一个能根据文字生成高清图片的模型——VQGAN。VQGAN不仅本身具有强大的图像生成能力,更是传承了前作VQVAE把图像压缩成离散编码的思想,推广了「先压缩,再生成」的两阶段图像生成思路,启发了无数后续工作。 VQGAN 核心思想 VQGAN的论文名为 Taming Transformers for High-Resolution Image Synthesis,直译过来是「驯服Transformer模型以实现高清图像合成」。可以看出,该方法是在用Transformer生成图像。可是,为什么这个模型叫做VQGAN,是一个GAN呢?这是因为,VQGAN使用了两阶段的图像生成方法: 训练时,先训练一个图像压缩模型(包括编码器和解码器两个子模型),再训练一个生成压缩图像的模型。 生成时, 先用第二个模型生成出一个压缩图像,再用第一个模型复原成真实图像 。 其中,第一个图像压缩模型叫做VQGAN,第二个压缩图像生成模型是一个基于Transformer的模型。...
Generative Model
2026-01-18

分布变换 通常我们会拿VAE跟GAN比较,的确,它们两个的目标基本是一致的——希望构建一个从隐变量 \(Z\) 生成目标数据 \(X\) 的模型,但是实现上有所不同。更准确地讲,它们是假设了 \(Z\) 服从某些常见的分布(比如正态分布或均匀分布),然后希望训练一个模型 \(X=g(Z)\) ,这个模型能够将原来的概率分布映射到训练集的概率分布,也就是说,它们的目的都是进行分布之间的变换。 生成模型的难题就是判断生成分布与真实分布的相似度,因为我们只知道两者的采样结果,不知道它们的分布表达式 那现在假设 \(Z\) 服从标准的正态分布,那么我就可以从中采样得到若干个 \(Z_1, Z_2, \dots, Z_n\) ,然后对它做变换得到 \(\hat{X}_1 = g(Z_1),\hat{X}_2 = g(Z_2),\dots,\hat{X}_n = g(Z_n)\) ,我们怎么判断这个通过 \(g\)...