Large Model
2026-01-11

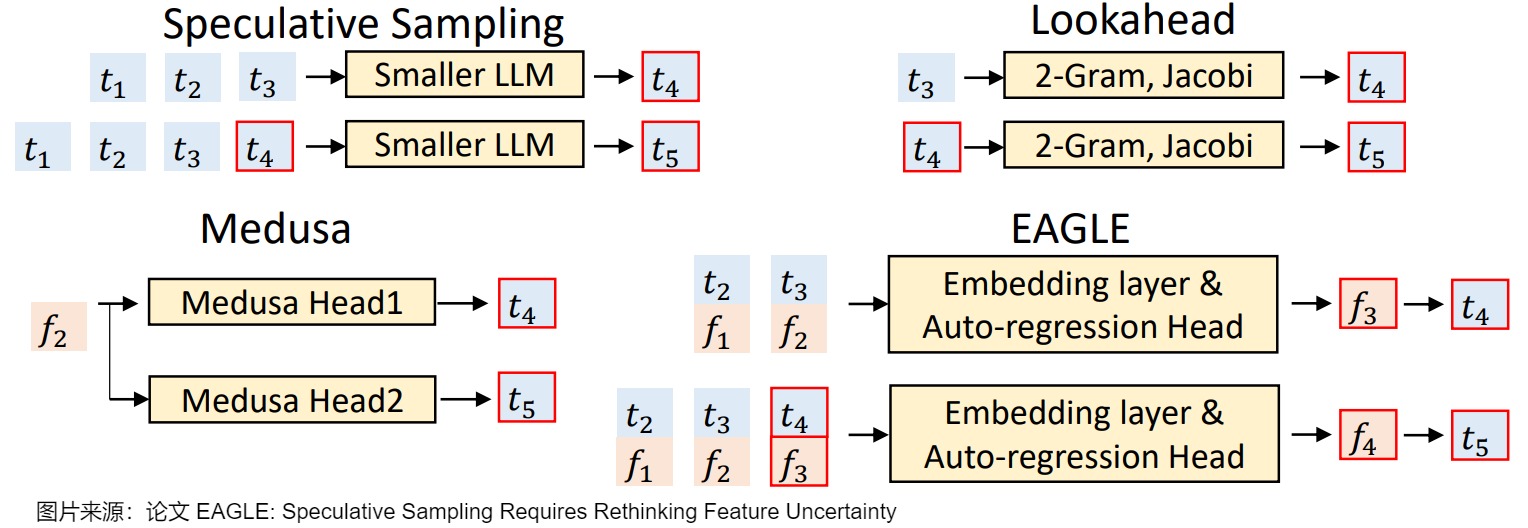
概述 Medusa 是自投机领域较早的一篇工作,对后续工作启发很大,其主要思想是 multidecoding head + tree attention + typical acceptance(threshold)。Medusa 没有使用独立的草稿模型,而是在原始模型的基础上增加多个解码头(MEDUSA heads),并行预测多个后续 token。 正常的LLM只有一个用于预测 t 时刻token的head。Medusa 在 LLM 的最后一个 Transformer层之后保留原始的 LM Head,然后额外增加多个(假设是 k 个) 可训练的Medusa Head(解码头),分别负责预测 ...