Generative Model
2026-01-11
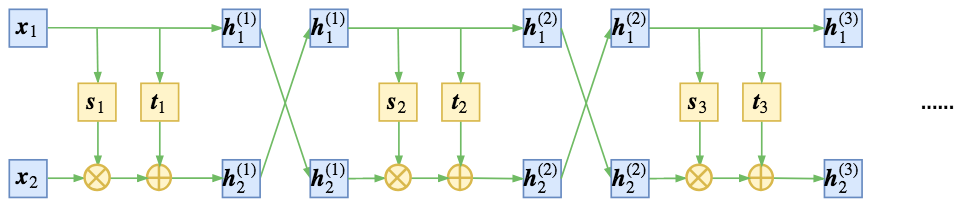
💡 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE。 细想上述过程,可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程 像GAN这样的生成模型,它本质上是希望找到一个确定性变换,能将从简单分布(如标准正态分布)采样出来的随机变量,变换为特定数据分布的样本。flow模型也是生成模型之一,它的思路是反过来,先找到一个能将数据分布变换简单分布的可逆变换,再求解相应的逆变换来得到一个生成模型。 ...