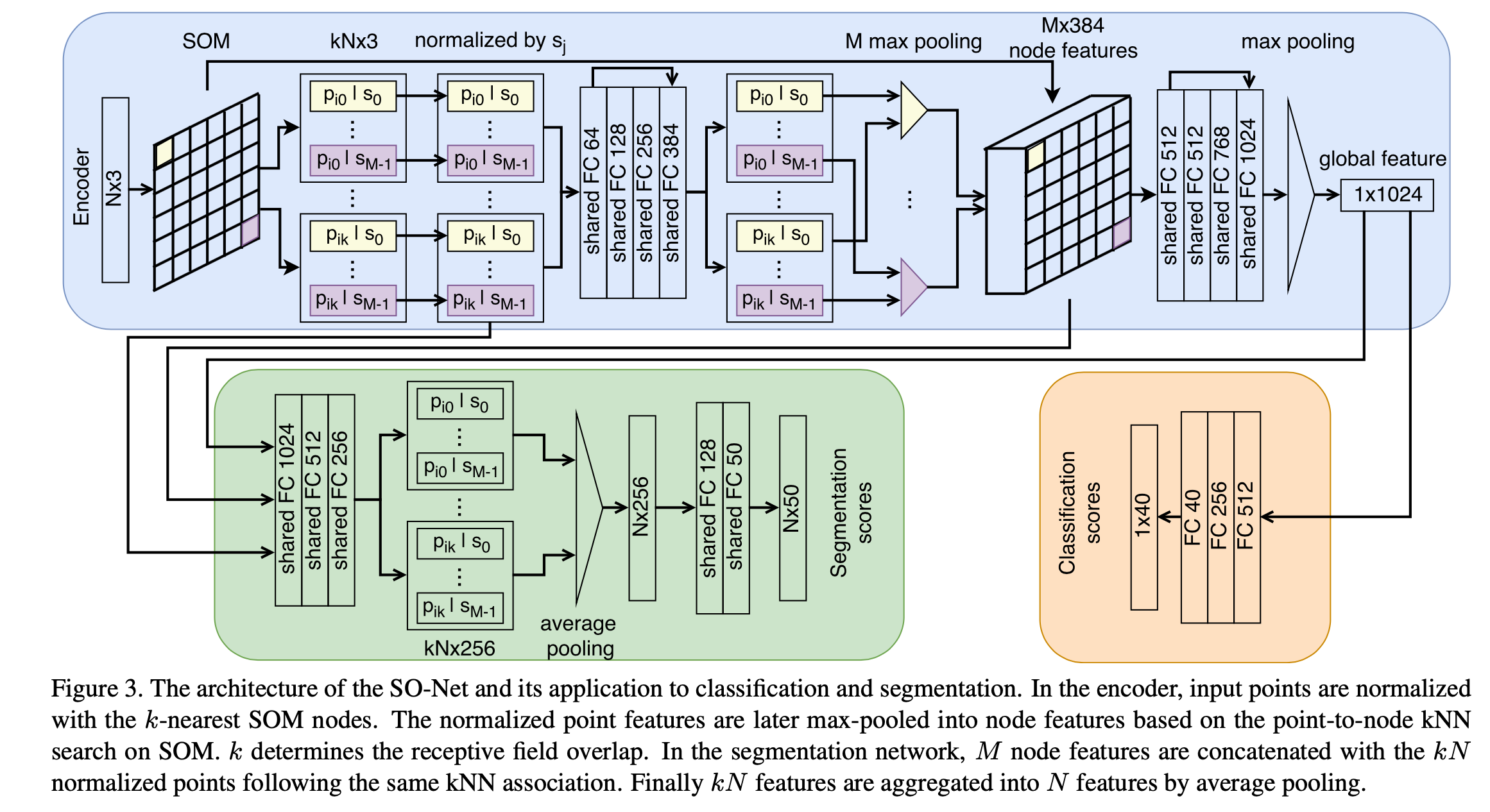
概括 针对一些网络在处理point cloud时的缺点,如:不能对点的空间分布进行建模(例如PointNet++,只是能获取局部信息不能得到局部区域之间的空间关系),提出了SONet。SO的含义是利用Selforganizing map的Net。 结果:它具有能够对点的空间分布进行建模、层次化特征提取、可调节的感受野范围的优点,并能够用于多种任务如重建、分类、分割等等。取得了相似或超过SOTA的性能,因为可并行化和架构简单使得训练速度很快。 贡献: TODO IDEA:作者发现将CNN直接用于SOM图上性能不升反降,为什么(推测:可能是SOM的2D map并不是保持了原本的空间对应关系,可能nodes之间是乱序的,导致用conv2d时精度反而降低)? 难点 如何对local regions之...
3D Model
2026-01-11
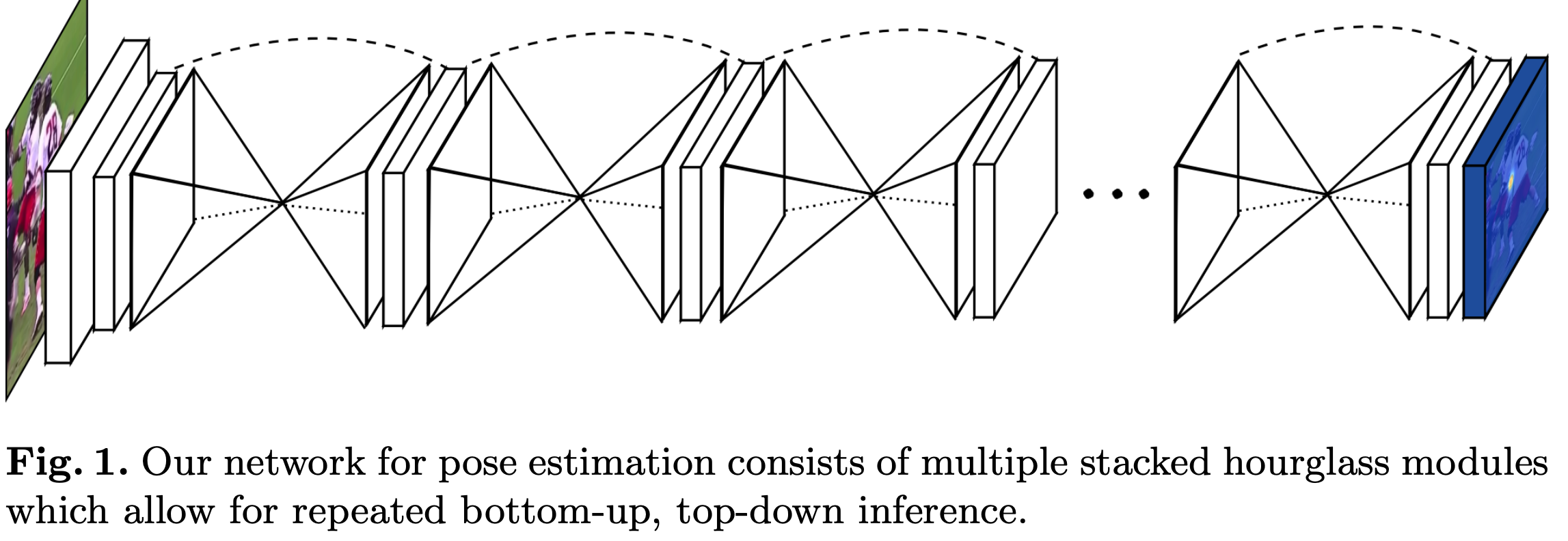
论文介绍了一种新的网络结构用于人体姿态检测,作者在论文中展现了不断重复bottomup、topdown过程以及运用intermediate supervison(中间监督)对于网络性能的提升,下面来介绍Stacked Hourglass Networks. 简介 理解人类的姿态对于一些高级的任务比如行为识别来说特别重要,而且也是一些人机交互任务的基础。作者提出了一种新的网络结构Stacked Hourglass Networks来对人体的姿态进行识别,这个网络结构能够捕获并整合图像所有尺度的信息。之所以称这种网络为Stacked Hourglass Networks,主要是它长得很像堆叠起来的沙漏,如下图所示: 这种堆叠在一起的Hourglass模块结构是对称的,bottomup过程将图片从...
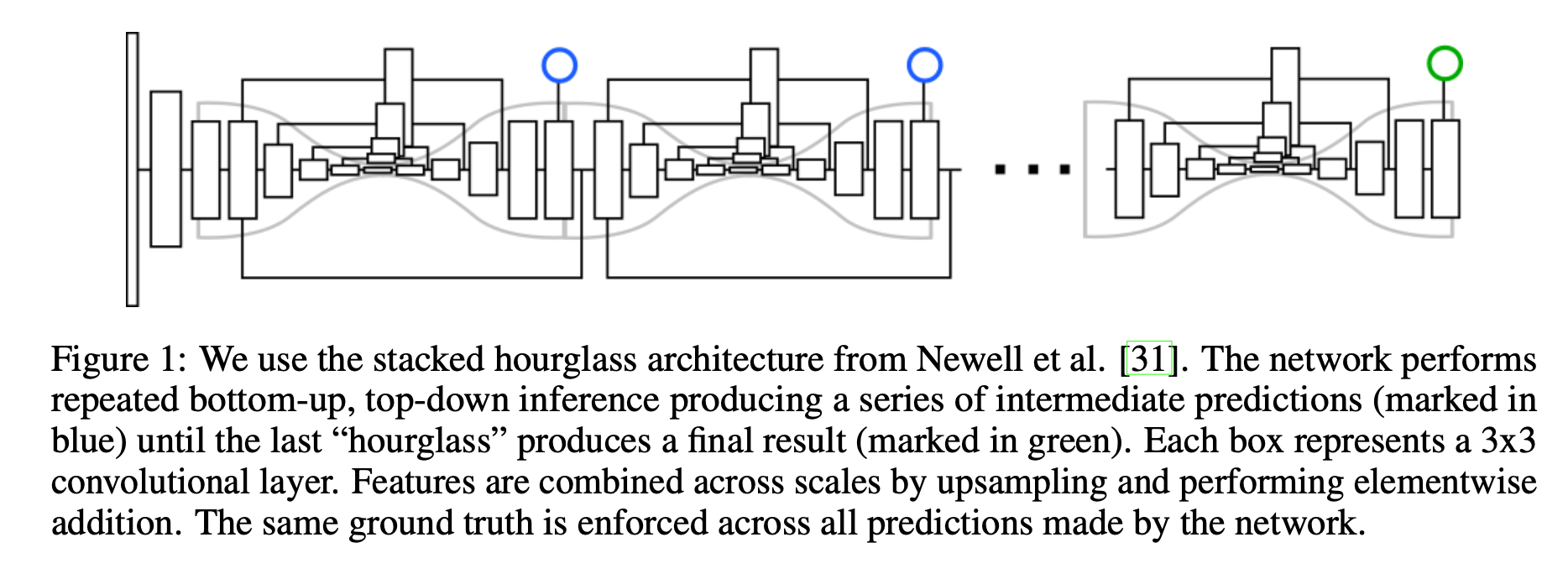
简介 作者认为许多计算机视觉的任务可以看作是检测和分组问题检测一些小的单元,然后将它们组合成更大的单元,例如,多人目标检测可以通过检测人的关节点然后再将它们进行分组(属于同一个人的关节点为一组)解决;实例分割问题可以看作是检测一些相关的像素然后将它们组合成一个目标实例。 Associative Embedding是一种表示关节检测和分组任务的输出的新方法,其基本思想是为每次检测引入一个实数,用作识别对象所属组的“tag”,换句话说,标签将每个检测与同一组中的其他检测相关联。作者使用一个损失函数使得如果相应的检测属于ground truth中的相同组则促使这一对标签具有相似的值。需要注意的是,这里标签具体的值并不重要,重要的是不同标签之间的差异。 这篇其实是源自Stacked Hourglas...
背包问题
Algorithm
2026-01-11
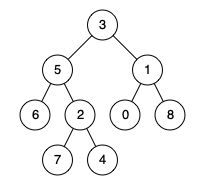
题目 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百度百科中最近公共祖先的定义为:“对于有根树 T 的两个节点 p、q,最近公共祖先表示为一个节点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以是它自己的祖先)。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1 输出:3 解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4 输出:5 解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root...
Algorithm
2026-01-11
题目 Given two sorted integer arrays nums1 and nums2, merge nums2 into nums1 as one sorted array. Note: The number of elements initialized in nums1 and nums2 are m and n respectively. You may assume that nums1 has enough space (size that is equal to m + n) to hold additional elements from nums2. Example: [代码] Constraints: 10^9 <= nums1[i], nums2[i] <...
3D Model
2026-01-11

整体流程: [代码] 0. 数据预处理 这个步骤主要是crop四路数据,及生成后续步骤所需要的yaml文件。 1. 四路相机与双路相机标定 内参标定 [代码] 这里主要的函数就是: pts = cv2.findChessboardCorners(img, (board_width, board_height))[1] cv2.cornerSubPix(gray, pts, (12, 12), (1, 1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)) det, intr, dist, _, _ = cv2.calibrateCamera(obj_pts, img_pts, self.imgSize, None, No...
Large Model
2026-01-11

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路,丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存...
Generative Model
2026-01-11

Diffusion Models from SDE 连续扩散模型 (Continuous Diffusion Models) 将传统的离散时间扩散过程扩展到连续时间域,可以被视为一个随机过程,使用随机微分方程(SDE)来描述。其前向过程可以写成如下形式: [公式] 其中, f(x,t) 可以看成偏移系数, g(t) 可以看成是扩散系数, dw 是标准布朗运动。这个SDE 描述了数据在连续时间域内如何被噪声逐渐破坏。 这个随机过程的逆向过程存在(更准确的描述:下面的逆向时间SDE具有与正向过程SDE相同的联合分布)为 [公式] 前面我们得到了扩散过程的逆向过程可以用一个SDE描述(逆向随机过程),事实上,存在一个确定性过程 (用ODE描述)也是它的逆向过程 (更准确的描述:这个ODE过程的在任...
DFS
NLP
2026-01-11

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了Transformer。Transformer 是Google Brain 2017的提出的一篇工...