线性结构与技巧 基础容器 数组 (Array) 链表 (Linked List) 字符串 (String) KMP算法 核心技巧 双指针 滑动窗口 二分查找 栈与队列 栈 & 队列 (Stack & Queue) 单调队列 树与图论 树与堆 (Tree & Heap) 树的遍历 二叉树 堆(大顶堆&小顶堆) 优先队列 图 (Graph) 搜索(BFS/DFS) 最小生成树 核心算法思想 动态规划 (DP) 基础 DP 背包问题 排序 基础排序算法 排序算法 数据处理 哈希表 Math

236. 二叉树的最近公共祖先 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百 度百科中最近公共祖先的定义为:“对于有根树 \(T\) 的两个节点 \(p\) 、 \(q\) ,最近公共祖先表示为一个节点 \(x\) ,满足 \(x\) 是 \(p\) 、 \(q \) 的祖先且 \(x\) 的深度尽可能大( 一个节点也可以是它自己的祖先 )。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1
输出:3
解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4
输出:5
解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root = [1,2], p = 1, q = 2
输出:1 提示: 树中节点数目在范围 [2, 10 5 ] 内。 -10 9 <= Node.val <= 10 9 所有 Node.val...
二叉树结构 class TreeNode:
def __init__(self, x):
self.val = x
self.left = None
self.right = None 递归 时间复杂度: \(O(n)\) , \(n\) 为节点数,访问每个节点恰好一次。 空间复杂度:空间复杂度: \(O(h)\) , \(h\) 为树的高度。最坏情况下需要空间 \(O(n)\) ,平均情况为 \(O(logn)\) 递归1: 二叉树遍历最易理解和实现版本 class Solution:
def preorderTraversal(self, root: TreeNode) -> List[int]:
if not root:
return []
# 前序递归
return [root.val] + self.preorderTraversal(root.left) + self.preorderTraversal(root.right)
...

48. 旋转图像 题目 给定一个 \(n × n\) 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。 请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]] 示例 2: 输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]]
输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]] 提示: n == matrix.length == matrix[i].length 1 <= n <= 20 -1000 <= matrix[i][j] <= 1000 题解 这是一个经典的矩阵操作问题。要在原地(In-place)将图像顺时针旋转 90 度,我们可以利用矩阵的几何性质。 最直观且易于实现的方法是将...
Large Model
2026-04-15

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路, 丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练 。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略 选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算 。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存,计算下一个节点完成后丢弃中间节点的激活值,反向传播时如果有保存下来的梯度就直接使用,如果没有就使用保存下来的前一个节点的梯度重新计算当前节点的梯度再使用。 Transformer框架开启梯度检查点非常简单,仅需在TrainingArguments中指定gradient...
Deep Learning
2026-04-15
一般来说,神经网络处理的东西都是连续的浮点数,标准的输出也是连续型的数字。但实际问题中,我们很多时候都需要一个离散的结果,比如分类问题中我们希望输出正确的类别,“类别”是离散的,“类别的概率”才是连续的;又比如我们很多任务的评测指标实际上都是离散的,比如分类问题的正确率和F1、机器翻译中的BLEU,等等。 还是以分类问题为例,常见的评测指标是正确率,而常见的损失函数是交叉熵。交叉熵的降低与正确率的提升确实会有一定的关联,但它们不是绝对的单调相关关系。换句话说,交叉熵下降了,正确率不一定上升。显然,如果能用正确率的相反数做损失函数,那是最理想的,但正确率是不可导的(涉及到 \(\text{argmax}\) 等操作),所以没法直接用。 这时候一般有两种解决方案;一是动用强化学习,将正确率设为奖励函数,这是“用牛刀杀鸡”的方案; 另外一种是试图给正确率找一个光滑可导的近似公式 。本文就来探讨一下常见的不可导函数的光滑近似,有时候我们称之为“光滑化”,有时候我们也称之为“软化”。 max 后面谈到的大部分内容,基础点就是max操作的光滑近似,我们有:...
Deep Learning
2026-04-15

文章从连续情形出发开始介绍重参数,主要的例子是正态分布的重参数;然后引入离散分布的重参数,这就涉及到了Gumbel Softmax,包括Gumbel Softmax的一些证明和讨论;最后再讲讲重参数背后的一些故事,这主要跟梯度估计有关。 基本概念 重参数(Reparameterization) 实际上是处理如下期望形式的目标函数的一种技巧: \[L_{\theta}=\mathbb{E}_{z\sim p_{\theta}(z)}[f(z)]\tag{1}\] 这样的目标在VAE中会出现,在文本GAN也会出现,在强化学习中也会出现( \(f(z)\) 对应于奖励函数),所以深究下去,我们会经常碰到这样的目标函数。取决于 \(z\) 的连续性,它对应不同的形式: \[\int p_{\theta}(z) f(z)dz\,\,\,\text{(连续情形)}\qquad\qquad \sum_{z} p_{\theta}(z) f(z)\,\,\,\text{(离散情形)}\tag{2}\] 当然,离散情况下我们更喜欢将记号 \(z\) 换成 \(y\) 或者 \(c\) 。 为了最小化...
Large Model
2026-04-15

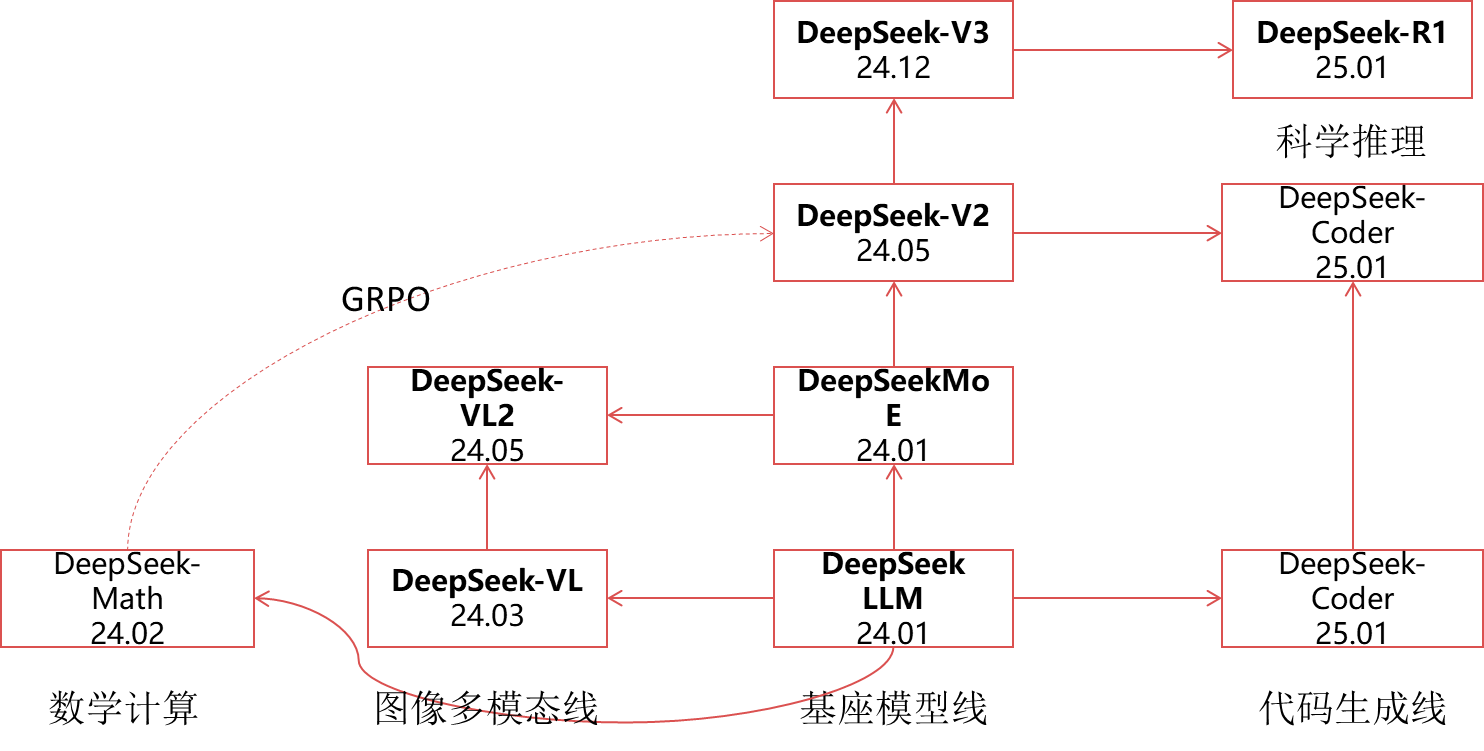
简介 24年12月,研究团队开发了 DeepSeek-V3,这是一个基于 MoE 架构的大模型,总参数量达到 671B,其中每个 token 会激活 37B 个参数。 基于提升性能和降低成本的双重目标,在架构设计方面,DeepSeek-V3 采用了 MLA 来确保推理效率,并使用 DeepSeekMoE 来实现经济高效的训练。这两种架构在 DeepSeek-V2 中已经得到验证,证实了它们能够在保持模型性能的同时实现高效的训练和推理。 除了延续这些基础架构外,研究团队还引入了两项创新策略来进一步提升模型性能。 首先,DeepSeek-V3 首创了 无辅助损失的负载均衡 策略(auxiliary-loss-free strategy for load balancing),有效降低了负载均衡对模型性能的负面影响。另外,DeepSeek-V3 采用了 多 token 预测训练目标, 这种方法在评估基准测试中展现出了显著的性能提升。 为了提高训练效率,该研究采用了 FP8 混合精度训练技术...
Large Model
2026-04-15
https://www.deepseek.com/ DeepSeek LLM 代码地址: https://github.com/deepseek-ai/DeepSeek-LLM 背景 量化巨头幻方探索AGI(通用人工智能)新组织“深度求索”在成立半年后,发布的第一代大模型,免费商用,完全开源。作为一家隐形的AI巨头,幻方拥有1万枚英伟达A100芯片,有手撸的HAI-LLM训练框架HAI-LLM:高效且轻量的大模型训练工具。 概述 DeepSeek LLMs,这是一系列在2万亿标记的英语和中文大型数据集上从头开始训练的开源模型 在本文中,深入解释了超参数选择、Scaling Laws以及做过的各种微调尝试。校准了先前工作中的Scaling Laws,并提出了新的最优模型/数据扩展-缩放分配策略。此外,还提出了一种方法,使用给定的计算预算来预测近似的batch-size和learning-rate。进一步得出结论,Scaling Laws与数据质量有关,这可能是不同工作中不同扩展行为的原因。在Scaling Laws的指导下,使用最佳超参数进行预训练,并进行全面评估。...
Large Model
2026-04-15

k1.5—CoT强化训练 概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 \(D = \{(x_i, y^*_i)\}_{i=1}^n\) ,其中包含问题 \(x_i\) 和对应的真实答案 \(y^*_i\) ,目标是训练一个策略模型 \(\pi_\theta\) 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 \(z = (z_1, z_2, ..., z_m)\) 来连接问题 \(x\) 和答案 \(y\) ,每个 \(z_i\) 是解决问题的重要中间步骤。 当解决问题 \(x\) 时,思维 \(z_t \sim \pi_\theta(\cdot|x, z_1, ..., z_{t-1})\) 被自回归采样,最终答案 \(y \sim \pi_\theta(\cdot|x, z_1, ..., z_m)\) 。 强化学习目标 基于真实答案 \(y^*\) ,分配一个值 \(r(x, y, y^*)...
Large Model
2026-04-15
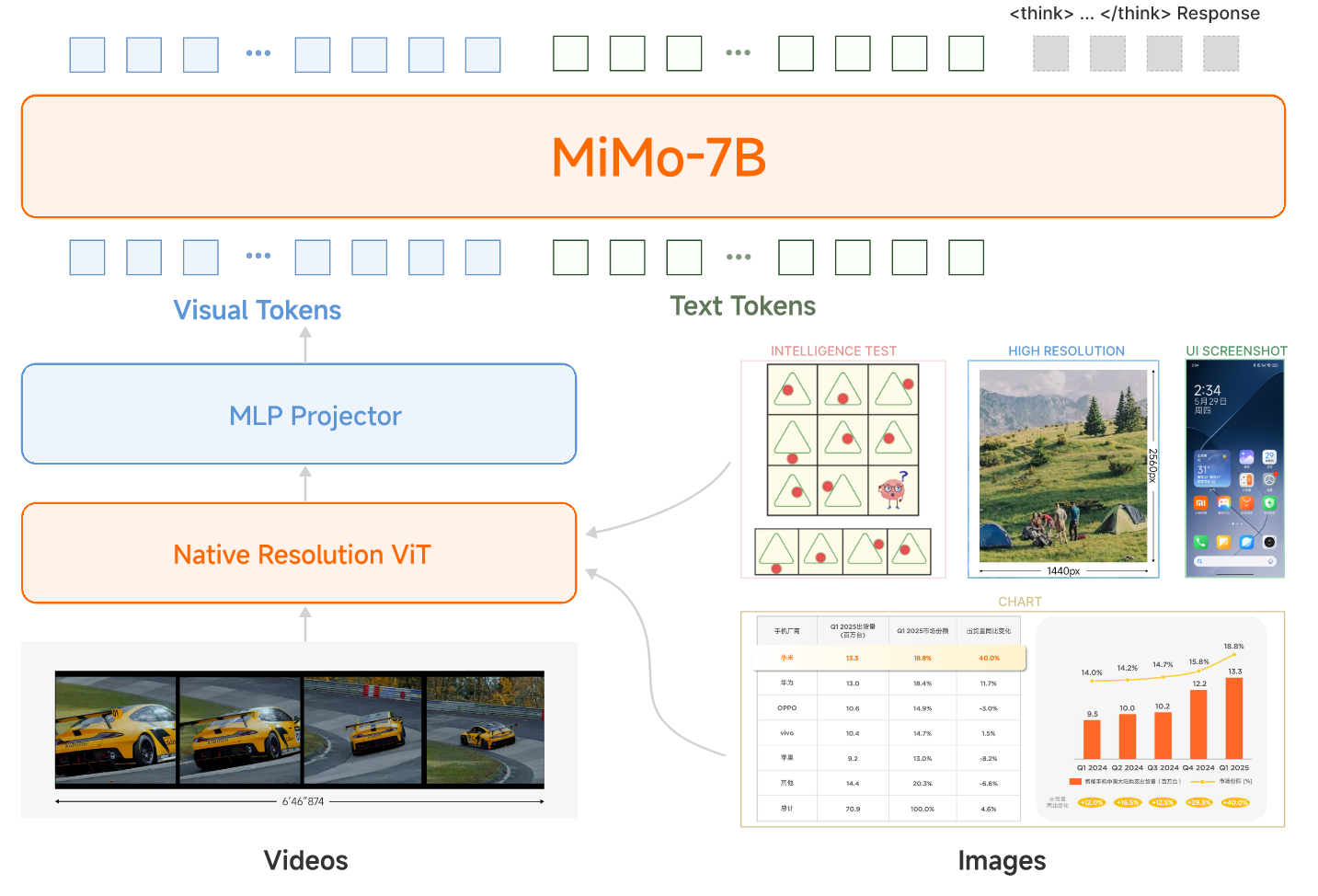
概述 小米团队近日发布了MIMO-VL-7B-SFT和MIMO-VL-7B-RL,这是两个强大的视觉语言模型,MIMO-VL-7B-RL在40个评估任务中的35个上优于QWEN2.5-VL-7B,对于GUI Grounding任务,它在OSWorld-G上设置了一个新标准,甚至超过了UI-TARS等专业模型。模型通过四个阶段的预训练(2.4T Token)与Mixed On-policy 强化(MORL)整合了多样化的奖励信号。 在文章中,作者提到了两个重要的发现: 从Pre-Traing 训练阶段中加入高质量且覆盖广的推理数据对于强化模型性能至关重要。 Mixed On-policy 强化学习进一步增强了模型的性能,同时实现了稳定的同时改进仍然在性能方面具有挑战性。 Pre-Training 模型结构 整个模型还是采用了VIT-MLP-LLM的结构,具体来说,视觉模型采用了Qwen2.5-VL中的视觉encoder,LLM采用了自家的语言模型MiMo-7B-Base。 整个Pretraining采用了四个阶段的训练,每个阶段采用的数据,模型训练参数和模型参数如下面两表所示...
Large Model
2026-04-15
引言 Structured Generation with LLM,是指 让LLM按照预先定义的schema,输出符合schema的结构化结果 。 常见的应用场景有: 数据处理 。主要功能为a -> b,即从源文本中 抽取/生成 符合schema的结果,例如给定新闻,进行分类、抽取关键词、生成总结等; Agent 。主要功能是Tool Calling,即根据用户query,选择适当的tool和入参。 将 LLM 限制为始终生成符合特定模式的、有效的 JSON 或 YAML,是许多应用的关键功能。 Kor Kor ,一个 基于prompt的技术方案 ;Kor比较适合 数据处理 场景,且原理简单、易于理解,适合作为入门, 并且Kor适用于那些不支持function calling的比较旧的模型。 使用Kor进行structured generation的流程如下: 定义schema,包括结构、注释还有例子; Kor用特定的 prompt template ,将用户提供的schema和待处理的raw text,组装成prompt; 将prompt发送给LLM,借助其通用的In...