Generative Model
2026-03-04

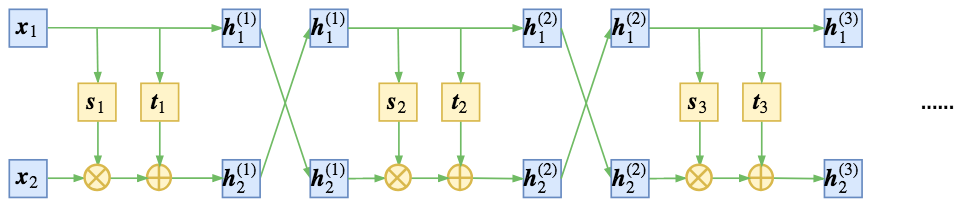
Flow Matching 其实是将 flow 的离散形式转换为连续形式(连续标准化流CNF),进而可以看成是一个ODE方程,实际求解的是这个ODE 求解的核心思路是:构建速度场通过数值积分求解位移,也就是通过预测速度场,从而转为ode求解 从概率路径的角度上来说,解是无穷多的,不同的方法本质上讲是在于构造尽可能简单、直接、易解的概率路径 通过不同的条件概率路径,可以构造出VP(score matching)、 VE(diffusion)、OT(1-rectified flow)等形式 实际的边缘概率分布路径并不是一条直线 ,我们是通过拟合条件速度场来逼近边缘速度场, 即使我们证明了对于参数 \(\theta\) 来说优化目标是等价的,但终究还是有一些gap Flow-based Models Normalizing Flow Normalizing Flow 是一种基于 变换 对概率分布进行建模的模型,其通过一系列 离散且可逆的变换 实现任意分布与先验分布(例如标准高斯分布)之间的相互转换。在 Normalizing Flow...