Deep Learning
2026-02-27
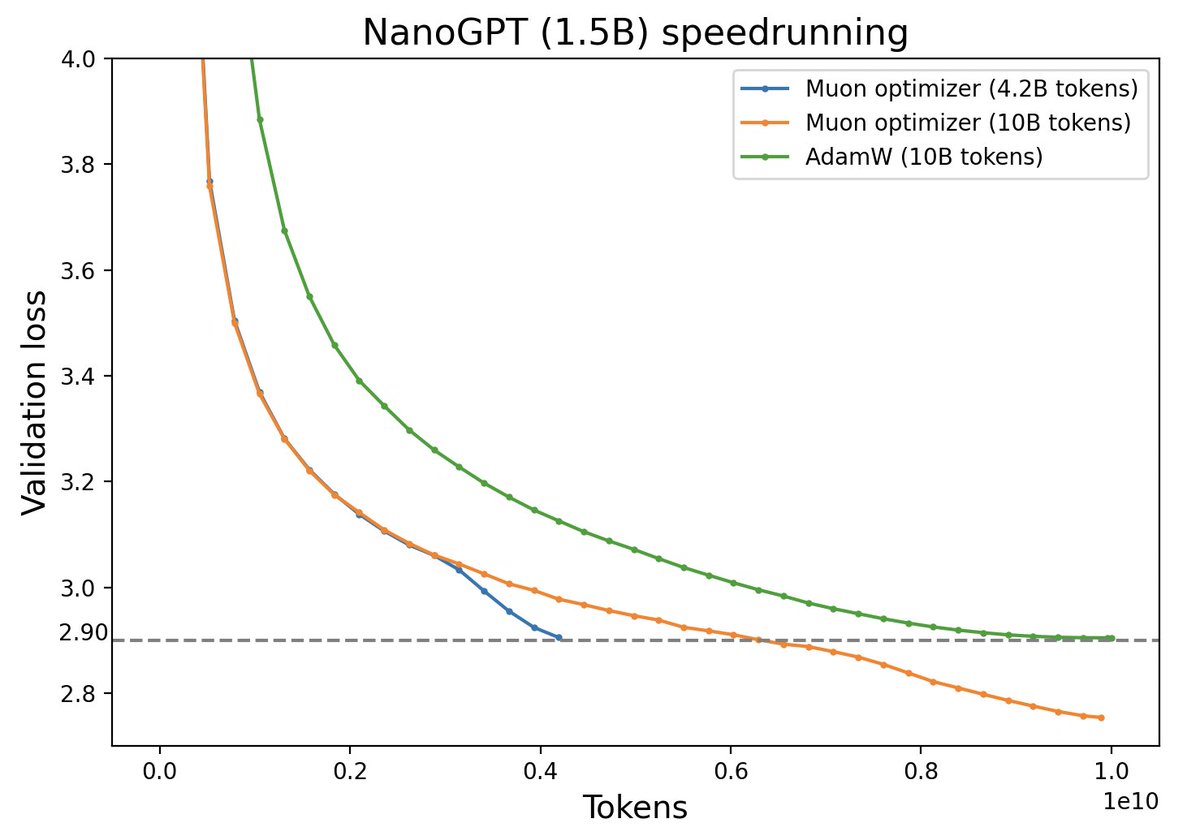
随着LLM时代的到来,学术界对于优化器的研究热情似乎有所减退。这主要是因为目前主流的AdamW已经能够满足大多数需求,而如果对优化器“大动干戈”,那么需要巨大的验证成本。因此,当前优化器的变化,多数都只是工业界根据自己的训练经验来对AdamW打的一些小补丁。 不过,最近推特上一个名为“Muon”的优化器颇为热闹,它声称比AdamW更为高效,且并不只是在Adam基础上的“小打小闹”,而是体现了关于向量与矩阵差异的一些值得深思的原理。本文让我们一起赏析一番。 算法初探 Muon全称是“MomentUm Orthogonalized by Newton-schulz”,它适用于矩阵参数 \(\boldsymbol{W}\in\mathbb{R}^{n\times m}\) ,其更新规则是 \[\begin{aligned}
\boldsymbol{M}_t =&\, \beta\boldsymbol{M}_{t-1} + \boldsymbol{G}_t \\[5pt]
\boldsymbol{W}_t =&\, \boldsymbol{W}_{t-1} - \eta_t...