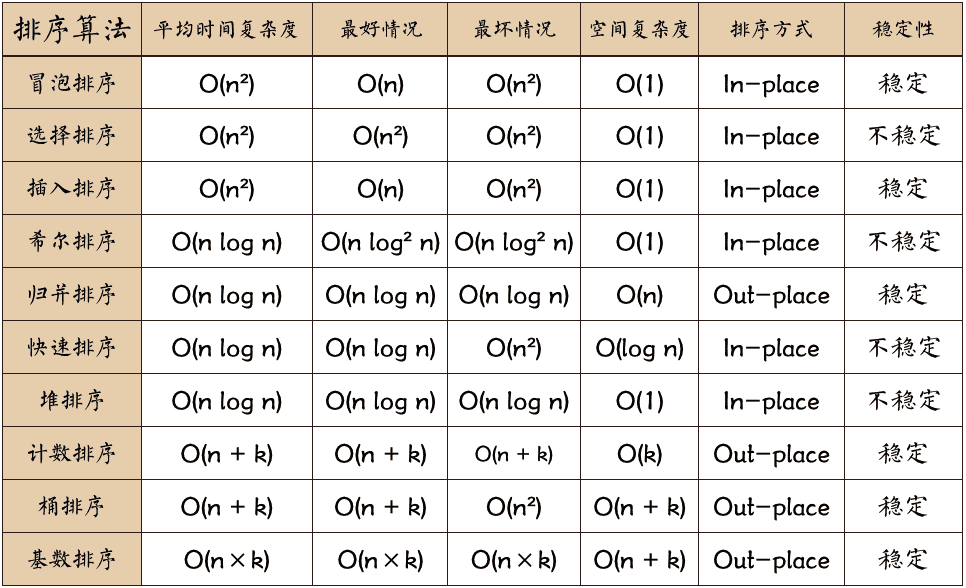
排序算法是《数据结构与算法》中最基本的算法之一。 排序算法可以分为内部排序和外部排序,内部排序是数据记录在内存中进行排序,而外部排序是因排序的数据很大,一次不能容纳全部的排序记录,在排序过程中需要访问外存。常见的内部排序算法有:插入排序、希尔排序、选择排序、冒泡排序、归并排序、快速排序、堆排序、基数排序等。用一张图概括: 冒泡排序 冒泡排序(Bubble Sort)是一种简单的排序算法,它通过重复地遍历待排序的列表,比较相邻的元素并交换它们的位置来实现排序。该算法的名称来源于较小的元素会像"气泡"一样逐渐"浮"到列表的顶端。 算法步骤 比较相邻元素 :从列表的第一个元素开始,比较相邻的两个元素。 交换位置 :如果前一个元素比后一个元素大,则交换它们的位置。 重复遍历 :对列表中的每一对相邻元素重复上述步骤,直到列表的末尾。这样,最大的元素会被"冒泡"到列表的最后。 缩小范围 :忽略已经排序好的最后一个元素,重复上述步骤,直到整个列表排序完成。 假设有一个待排序的列表 [5, 3, 8, 4, 6] ,冒泡排序的过程如下: 第一轮遍历 : 比较 5 和 3,交换位置,列表变为 [3,...
Algorithm
2026-02-25
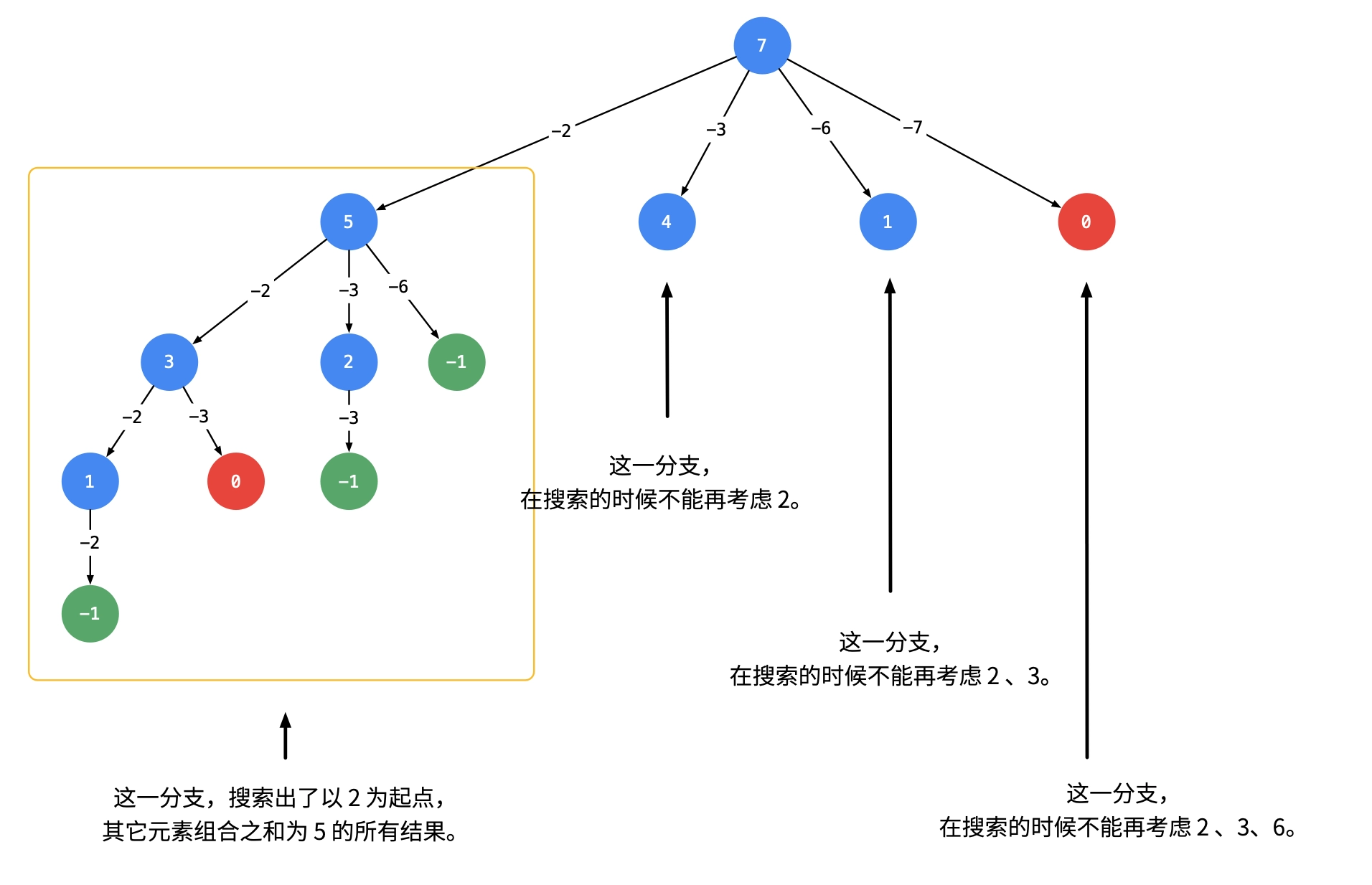
DFS 39&40. 组合总和 题目 给你一个 无重复元素 的整数数组 candidates 和一个目标整数 target ,找出 candidates 中可以使数字和为目标数 target 的 所有 不同组合 ,并以列表形式返回。你可以按 任意顺序 返回这些组合。 candidates 中的 同一个 数字可以 无限制重复被选取 。如果至少一个数字的被选数量不同,则两种组合是不同的。 对于给定的输入,保证和为 target 的不同组合数少于 150 个。 示例 1: 输入:candidates = [2,3,6,7], target = 7
输出:[[2,2,3],[7]]
解释:
2 和 3 可以形成一组候选,2 + 2 + 3 = 7 。注意 2 可以使用多次。
7 也是一个候选, 7 = 7 。
仅有这两种组合。 示例 2: 输入: candidates = [2,3,5], target = 8
输出: [[2,2,2,2],[2,3,3],[3,5]] 示例 3: 输入: candidates = [2], target = 1
输出: [] 提示: 1 <=...
二叉树结构 class TreeNode:
def __init__(self, x):
self.val = x
self.left = None
self.right = None 递归 时间复杂度: \(O(n)\) , \(n\) 为节点数,访问每个节点恰好一次。 空间复杂度:空间复杂度: \(O(h)\) , \(h\) 为树的高度。最坏情况下需要空间 \(O(n)\) ,平均情况为 \(O(logn)\) 递归1: 二叉树遍历最易理解和实现版本 class Solution:
def preorderTraversal(self, root: TreeNode) -> List[int]:
if not root:
return []
# 前序递归
return [root.val] + self.preorderTraversal(root.left) + self.preorderTraversal(root.right)
...

236. 二叉树的最近公共祖先 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百 度百科中最近公共祖先的定义为:“对于有根树 \(T\) 的两个节点 \(p\) 、 \(q\) ,最近公共祖先表示为一个节点 \(x\) ,满足 \(x\) 是 \(p\) 、 \(q \) 的祖先且 \(x\) 的深度尽可能大( 一个节点也可以是它自己的祖先 )。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1
输出:3
解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4
输出:5
解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root = [1,2], p = 1, q = 2
输出:1 提示: 树中节点数目在范围 [2, 10 5 ] 内。 -10 9 <= Node.val <= 10 9 所有 Node.val...
Algorithm
2026-02-25
实现 方式一:使用 heapq 标准库 这是 Python 最快、最节省内存的方式,因为 heapq 底层是用 C 语言实现的。 小顶堆 (Min Heap) Python 的 heapq 默认就是小顶堆。 import heapq
# 初始化
min_heap = []
# 添加元素 O(log N)
heapq.heappush(min_heap, 5)
heapq.heappush(min_heap, 2)
heapq.heappush(min_heap, 8)
# 查看堆顶 O(1)
print(min_heap[0]) # 输出: 2
# 弹出堆顶 O(log N)
pop_val = heapq.heappop(min_heap)
print(pop_val) # 输出: 2
print(min_heap) # 输出: [5, 8] (注意:堆内部不一定有序,但堆顶一定是最小的)
# 将已有的列表转化为堆 O(N)
nums = [5, 7, 1, 3]
heapq.heapify(nums)
print(nums) #...
堆和优先队列的关系 这是一个非常经典且核心的计算机科学概念问题。一言以蔽之: 优先队列(Priority Queue)是逻辑接口(ADT),而堆(Heap)是实现这个接口最高效的物理数据结构。 它们的关系可以类比为 “接口(Interface)” 与 “实现类(Implementation)” 的关系,或者 “汽车(功能)”与 “发动机(核心组件)” 的关系。 优先队列 (Priority Queue) —— 逻辑层 (ADT) 定义 :它是一种 抽象数据类型 (Abstract Data Type, ADT) 。它定义了数据的 行为 ,而不是数据的存储方式。 规则 :普通的队列是“先进先出”(FIFO),而优先队列是 “优先级最高的先出” 。 核心操作 : insert(item, priority) : 插入一个带优先级的元素。 deleteMax() 或 deleteMin() : 取出并删除优先级最高(或最低)的元素。 peek() : 查看优先级最高的元素。 堆 (Heap) —— 物理层 (Data Structure) 定义 :它是一种具体的 数据结构 。通常指 二叉堆...
引入 在具体讲何为「背包 dp」前,先来看如下的例题: 题意概要:有 \( 𝑛\) 个物品和一个容量为 \( 𝑊\) 的背包,每个物品有重量 \(𝑤_𝑖\) 和价值 \(𝑣_𝑖\) 两种属性,要求选若干物品放入背包使背包中物品的总价值最大且背包中物品的总重量不超过背包的容量. 在上述例题中,由于每个物体只有两种可能的状态(取与不取),对应二进制中的 0 和 1,这类问题便被称为「0-1 背包问题」. 0-1背包 解释 例题中已知条件有第 \(𝑖\) 个物品的重量 \(𝑤_𝑖\) ,价值 \(𝑣_𝑖\) ,以及背包的总容量 \(𝑊\) . 设 DP 状态 \(𝑓_{𝑖,𝑗} \) 为在只能放前 \(𝑖\) 个物品的情况下,容量为 \(𝑗\) 的背包所能达到的最大总价值. 考虑转移.假设当前已经处理好了前 \(𝑖 −1 \) 个物品的所有状态,那么对于第 \(𝑖\) 个物品,当其不放入背包时,背包的剩余容量不变,背包中物品的总价值也不变,故这种情况的最大价值为 \(𝑓_{𝑖−1,𝑗}\) ;当其放入背包时,背包的剩余容量会减小 \(𝑤_𝑖\) ,背包中物品的总价值会增大 \(𝑣_𝑖\)...
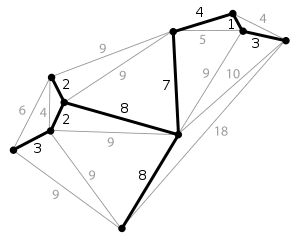
简介 生成树(spanning tree) 在图论中,无向图 \(G=(V,E)\) 的生成树(spanning tree)是具有 \(G\) 的全部顶点,但边数最少的联通子图。假设 \(G\) 中一共有 \(n\) 个顶点,一颗生成树满足下列条件 \(n\) 个顶点; \(n-1\) 条边; \(n\) 个顶点联通; 一个图的生成树可能有多个。 最小生成树(minimum spanning tree, MST)/最小生成森林 :联通加权无向图中边缘权重加和最小的生成树。给定无向图 \(G=(V,E)\) , \((u,v)\) 代表顶点 \(u\) 与顶点 \(v\) 的边, \(w(u,v)\) 代表此边的权重,若存在生成树T使得: \[w(T) = \sum_{(u,v)\in T}w(w,v)\] 最小,则 \(T\) 为 \(G\) 的最小生成树。对于非连通无向图来说,它的每一 连通分量 同样有最小生成树,它们的并被称为 最小生成森林 。最小生成树除了继承生成树的性质之外,还存在下面两个特点: 当图的每一条边的权值都相同时,该图的所有生成树都是最小生成树;...
3D Model
2026-02-12

深度相机 “工欲善其事必先利其器‘’我们先从能够获取RGBD数据的相机开始谈起。首先我们来看一看其分类。 根据其工作原理主要分为三类: 1.双目方案 基于双目立体视觉的深度相机类似人类的双眼,和基于TOF、结构光原理的深度相机不同,它不对外主动投射光源,完全依靠拍摄的两张图片(彩色RGB或者灰度图)来计算深度,因此有时候也被称为被动双目深度相机。比较知名的产品有STEROLABS 推出的 ZED 2K Stereo Camera和Point Grey 公司推出的 BumbleBee。 双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中, 双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像 ,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。 双目视觉有的时候我们也会把它称为体视,是人类利用双眼获取环境三维信息的主要途径。从目前来看,随着机器视觉理论的发展,双目立体视觉在机器视觉研究中发回来看了越来越重要的作用 为什么非得用双目相机才能得到深度?...

Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用 \((r,θ)\) 两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的 \((r,θ)\) ,在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数 \((r,θ)\) 就在每条曲线中都存在,所以看起来就像是多条曲线相交在 \((r,θ)\) 。可以用多条曲线投票的方式来看,其他点都是很少的票数,而 \((r,θ)\) 则票数很多,所以直线的参数就是 \((r,θ)\) 。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数高的就是要得到的值。 文中提到的Hough Voting如下: A traditional Hough voting 2D detector comprises an offline and an online step....
3D Model
2026-02-12

三维深度学习简介 多视角(multi-view):通过多视角二维图片组合为三维物体,此方法将传统CNN应用于多张二维视角的图片,特征被view pooling procedure聚合起来形成三维物体; 体素(volumetric):通过将物体表现为空间中的体素进行类似于二维的三维卷积(例如,卷积核大小为5x5x5),是规律化的并且易于类比二维的,但同时因为多了一个维度出来,时间和空间复杂度都非常高,目前已经不是主流的方法了; 点云(point clouds):直接将三维点云抛入网络进行训练,数据量小。主要任务有分类、分割以及大场景下语义分割; 非欧式(manifold,graph):在流形或图的结构上进行卷积,三维点云可以表现为mesh结构,可以通过点对之间临接关系表现为图的结构。 点云的特性 无序性...

概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translation-invariance和permutation-invariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR-10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例说明一下如何将卷积拓展到点云。这里只考虑使用一个kernel在一个location的一次卷积操作。 对于二维图像,我们可以将图像的pixels看作是一个点,那么图像就是整齐排列的点阵。每个point都有维度为 \(C_{in}\)...