线性结构与技巧 基础容器 数组 (Array) 链表 (Linked List) 字符串 (String) KMP算法 核心技巧 双指针 滑动窗口 二分查找 栈与队列 栈 & 队列 (Stack & Queue) 单调队列 树与图论 树与堆 (Tree & Heap) 树的遍历 二叉树 堆(大顶堆&小顶堆) 优先队列 图 (Graph) 搜索(BFS/DFS) 最小生成树 核心算法思想 动态规划 (DP) 基础 DP 背包问题 排序 基础排序算法 排序算法 数据处理 哈希表 Math
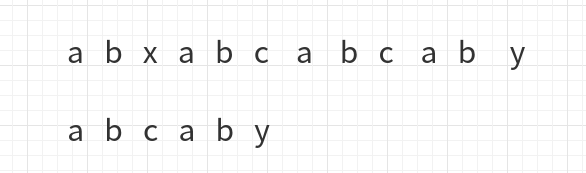
kmp算法用于字符串的模式匹配,也就是找到模式字符串在目标字符串的第一次出现的位置比如 abababc 那么 bab 在其位置1处, bc 在其位置5处,我们首先想到的最简单的办法就是蛮力的一个字符一个字符的匹配,但那样的时间复杂度会是 \(O(m*n)\) 。kmp算法保证了时间复杂度为 \(O(m+n)\) 。 基本原理 举个例子: 发现 x 与 c 不同后,进行移动 a 与 x 不同,再次移动 此时比较到了 c 与 y , 于是下一步移动成了下面这样 这一次的移动与前两次的移动不同,之前每次比较到上面长字符串的字符位置后,直接把模式字符串的首字符与它对齐,这次并没有,原因是这次移动之前, y 与 c 对齐,但是 y 前边的 ab 是与自己的前缀 ab 一样,于是 ab 并不用再比较,直接从第三个位置开始比较,如图: 所以说 kmp算法对于这种情况就直接使用当前比较字符之前的最长相同的前后缀,然后将前缀与上面的长字符串对齐,继续比较后面的字符串 。 这里kmp算法中的一个重要点就来了,如何找到 模式字符串中每位字符之前的最长相同前后缀呢 这里继续用一个例子举例: 下面的数字记录...
💡 不断排除不存在解的区间,直至最后剩下一个 这里归纳最重要的部分: 分析题意,挖掘题目中隐含的 单调性; while (left < right) 退出循环的时候有 left == right 成立,因此无需考虑返回 left 还是 right ; 始终思考下一轮搜索区间是什么,如果是 [mid, right] 就对应 left = mid ,如果是 [left, mid - 1] 就对应 right = mid - 1 ,是保留 mid 还是 +1、−1 就在这样的思考中完成; 从一个元素什么时候不是解开始考虑下一轮搜索区间是什么 ,把区间分为 2个部分(一个部分肯定不存在目标元素,另一个部分有可能存在目标元素),问题会变得简单很多,这是一条 非常有用 的经验; 每一轮区间被划分成 2 部分,理解 区间划分 决定中间数取法( 无需记忆,需要练习 + 理解 ),在调试的过程中理解 区间和中间数划分的配对关系: 划分 [left, mid] 与 [mid + 1, right] ,mid 被分到左边,对应 int mid = left + (right - left) / 2 ;...
164. 最大间距 题目 给定一个无序的数组,找出数组在排序之后,相邻元素之间最大的差值。 如果数组元素个数小于 2,则返回 0。 Example 1: Input: [3,6,9,1]
Output: 3
Explanation: The sorted form of the array is [1,3,6,9], either
(3,6) or (6,9) has the maximum difference 3. 题解 如果进行排序,这里会超时。采用桶排序 基础排序算法 的思想,可以在线性时间解决。 首先建立桶,每个桶中只需要存放这个桶中元素的最大值和最小值。 我们期望将数组中的各个数等距离分配,也就是每个桶的长度相同,也就是对于所有桶来说,桶内最大值减去桶内最小值都是一样的。可以当成公式来记。 \[每个桶的长度=\max(1,\lfloor{{\max(nums)-\min(nums)}\over{len(nums)-1}}\rfloor)\tag{1}\]...
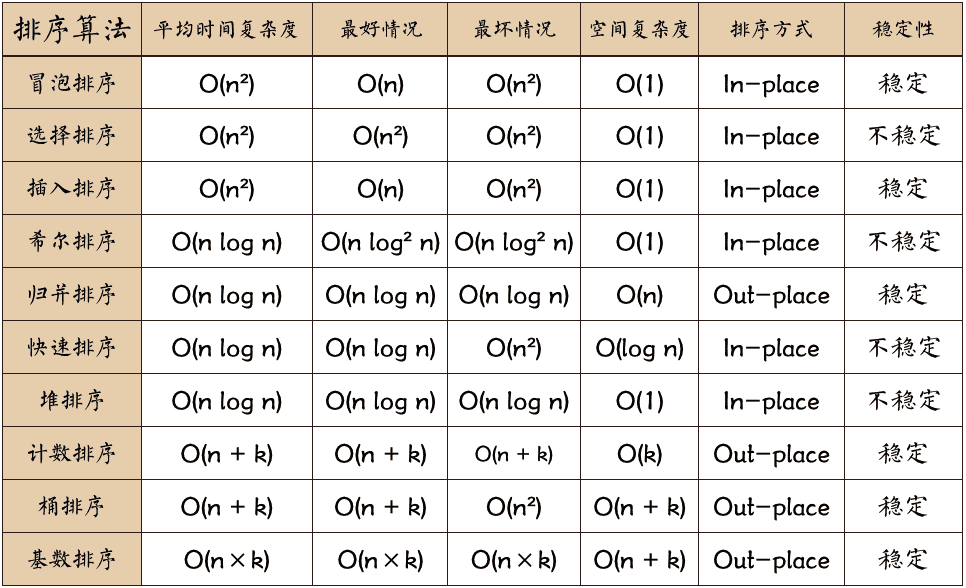
排序算法是《数据结构与算法》中最基本的算法之一。 排序算法可以分为内部排序和外部排序,内部排序是数据记录在内存中进行排序,而外部排序是因排序的数据很大,一次不能容纳全部的排序记录,在排序过程中需要访问外存。常见的内部排序算法有:插入排序、希尔排序、选择排序、冒泡排序、归并排序、快速排序、堆排序、基数排序等。用一张图概括: 冒泡排序 冒泡排序(Bubble Sort)是一种简单的排序算法,它通过重复地遍历待排序的列表,比较相邻的元素并交换它们的位置来实现排序。该算法的名称来源于较小的元素会像"气泡"一样逐渐"浮"到列表的顶端。 算法步骤 比较相邻元素 :从列表的第一个元素开始,比较相邻的两个元素。 交换位置 :如果前一个元素比后一个元素大,则交换它们的位置。 重复遍历 :对列表中的每一对相邻元素重复上述步骤,直到列表的末尾。这样,最大的元素会被"冒泡"到列表的最后。 缩小范围 :忽略已经排序好的最后一个元素,重复上述步骤,直到整个列表排序完成。 假设有一个待排序的列表 [5, 3, 8, 4, 6] ,冒泡排序的过程如下: 第一轮遍历 : 比较 5 和 3,交换位置,列表变为 [3,...
Algorithm
2026-02-25
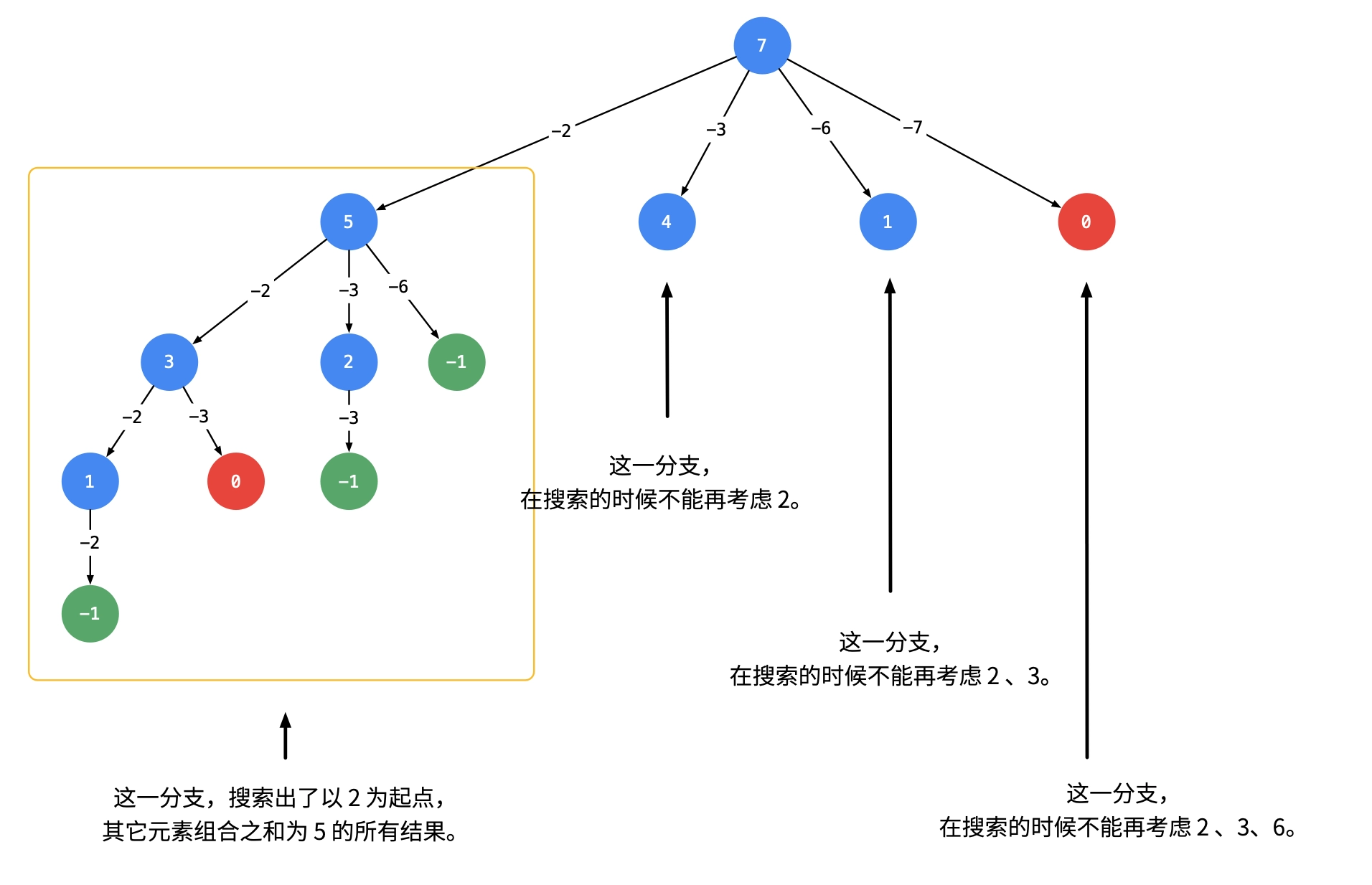
DFS 39&40. 组合总和 题目 给你一个 无重复元素 的整数数组 candidates 和一个目标整数 target ,找出 candidates 中可以使数字和为目标数 target 的 所有 不同组合 ,并以列表形式返回。你可以按 任意顺序 返回这些组合。 candidates 中的 同一个 数字可以 无限制重复被选取 。如果至少一个数字的被选数量不同,则两种组合是不同的。 对于给定的输入,保证和为 target 的不同组合数少于 150 个。 示例 1: 输入:candidates = [2,3,6,7], target = 7
输出:[[2,2,3],[7]]
解释:
2 和 3 可以形成一组候选,2 + 2 + 3 = 7 。注意 2 可以使用多次。
7 也是一个候选, 7 = 7 。
仅有这两种组合。 示例 2: 输入: candidates = [2,3,5], target = 8
输出: [[2,2,2,2],[2,3,3],[3,5]] 示例 3: 输入: candidates = [2], target = 1
输出: [] 提示: 1 <=...
二叉树结构 class TreeNode:
def __init__(self, x):
self.val = x
self.left = None
self.right = None 递归 时间复杂度: \(O(n)\) , \(n\) 为节点数,访问每个节点恰好一次。 空间复杂度:空间复杂度: \(O(h)\) , \(h\) 为树的高度。最坏情况下需要空间 \(O(n)\) ,平均情况为 \(O(logn)\) 递归1: 二叉树遍历最易理解和实现版本 class Solution:
def preorderTraversal(self, root: TreeNode) -> List[int]:
if not root:
return []
# 前序递归
return [root.val] + self.preorderTraversal(root.left) + self.preorderTraversal(root.right)
...

236. 二叉树的最近公共祖先 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百 度百科中最近公共祖先的定义为:“对于有根树 \(T\) 的两个节点 \(p\) 、 \(q\) ,最近公共祖先表示为一个节点 \(x\) ,满足 \(x\) 是 \(p\) 、 \(q \) 的祖先且 \(x\) 的深度尽可能大( 一个节点也可以是它自己的祖先 )。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1
输出:3
解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4
输出:5
解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root = [1,2], p = 1, q = 2
输出:1 提示: 树中节点数目在范围 [2, 10 5 ] 内。 -10 9 <= Node.val <= 10 9 所有 Node.val...
Algorithm
2026-02-25
实现 方式一:使用 heapq 标准库 这是 Python 最快、最节省内存的方式,因为 heapq 底层是用 C 语言实现的。 小顶堆 (Min Heap) Python 的 heapq 默认就是小顶堆。 import heapq
# 初始化
min_heap = []
# 添加元素 O(log N)
heapq.heappush(min_heap, 5)
heapq.heappush(min_heap, 2)
heapq.heappush(min_heap, 8)
# 查看堆顶 O(1)
print(min_heap[0]) # 输出: 2
# 弹出堆顶 O(log N)
pop_val = heapq.heappop(min_heap)
print(pop_val) # 输出: 2
print(min_heap) # 输出: [5, 8] (注意:堆内部不一定有序,但堆顶一定是最小的)
# 将已有的列表转化为堆 O(N)
nums = [5, 7, 1, 3]
heapq.heapify(nums)
print(nums) #...
堆和优先队列的关系 这是一个非常经典且核心的计算机科学概念问题。一言以蔽之: 优先队列(Priority Queue)是逻辑接口(ADT),而堆(Heap)是实现这个接口最高效的物理数据结构。 它们的关系可以类比为 “接口(Interface)” 与 “实现类(Implementation)” 的关系,或者 “汽车(功能)”与 “发动机(核心组件)” 的关系。 优先队列 (Priority Queue) —— 逻辑层 (ADT) 定义 :它是一种 抽象数据类型 (Abstract Data Type, ADT) 。它定义了数据的 行为 ,而不是数据的存储方式。 规则 :普通的队列是“先进先出”(FIFO),而优先队列是 “优先级最高的先出” 。 核心操作 : insert(item, priority) : 插入一个带优先级的元素。 deleteMax() 或 deleteMin() : 取出并删除优先级最高(或最低)的元素。 peek() : 查看优先级最高的元素。 堆 (Heap) —— 物理层 (Data Structure) 定义 :它是一种具体的 数据结构 。通常指 二叉堆...
引入 在具体讲何为「背包 dp」前,先来看如下的例题: 题意概要:有 \( 𝑛\) 个物品和一个容量为 \( 𝑊\) 的背包,每个物品有重量 \(𝑤_𝑖\) 和价值 \(𝑣_𝑖\) 两种属性,要求选若干物品放入背包使背包中物品的总价值最大且背包中物品的总重量不超过背包的容量. 在上述例题中,由于每个物体只有两种可能的状态(取与不取),对应二进制中的 0 和 1,这类问题便被称为「0-1 背包问题」. 0-1背包 解释 例题中已知条件有第 \(𝑖\) 个物品的重量 \(𝑤_𝑖\) ,价值 \(𝑣_𝑖\) ,以及背包的总容量 \(𝑊\) . 设 DP 状态 \(𝑓_{𝑖,𝑗} \) 为在只能放前 \(𝑖\) 个物品的情况下,容量为 \(𝑗\) 的背包所能达到的最大总价值. 考虑转移.假设当前已经处理好了前 \(𝑖 −1 \) 个物品的所有状态,那么对于第 \(𝑖\) 个物品,当其不放入背包时,背包的剩余容量不变,背包中物品的总价值也不变,故这种情况的最大价值为 \(𝑓_{𝑖−1,𝑗}\) ;当其放入背包时,背包的剩余容量会减小 \(𝑤_𝑖\) ,背包中物品的总价值会增大 \(𝑣_𝑖\)...
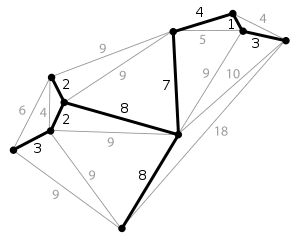
简介 生成树(spanning tree) 在图论中,无向图 \(G=(V,E)\) 的生成树(spanning tree)是具有 \(G\) 的全部顶点,但边数最少的联通子图。假设 \(G\) 中一共有 \(n\) 个顶点,一颗生成树满足下列条件 \(n\) 个顶点; \(n-1\) 条边; \(n\) 个顶点联通; 一个图的生成树可能有多个。 最小生成树(minimum spanning tree, MST)/最小生成森林 :联通加权无向图中边缘权重加和最小的生成树。给定无向图 \(G=(V,E)\) , \((u,v)\) 代表顶点 \(u\) 与顶点 \(v\) 的边, \(w(u,v)\) 代表此边的权重,若存在生成树T使得: \[w(T) = \sum_{(u,v)\in T}w(w,v)\] 最小,则 \(T\) 为 \(G\) 的最小生成树。对于非连通无向图来说,它的每一 连通分量 同样有最小生成树,它们的并被称为 最小生成森林 。最小生成树除了继承生成树的性质之外,还存在下面两个特点: 当图的每一条边的权值都相同时,该图的所有生成树都是最小生成树;...