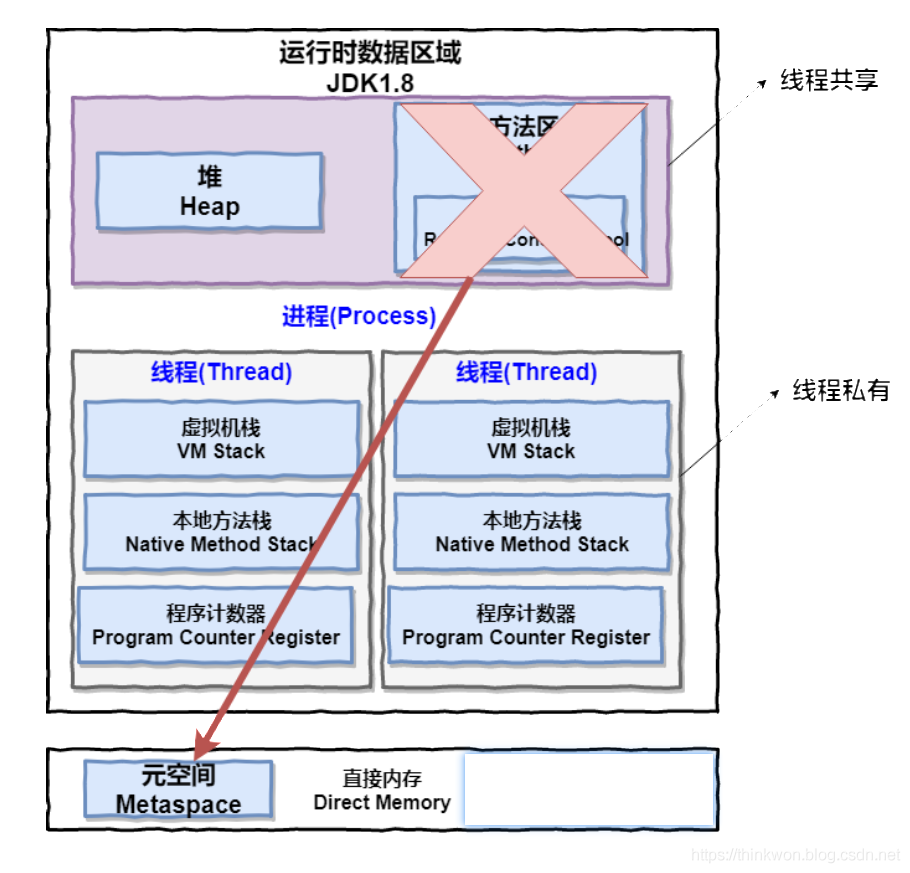
进程 一个在内存中运行的应用程序。每个进程都有自己独立的一块内存空间,一个进程可以有多个线程,比如在Windows系统中,一个运行的xx.exe就是一个进程。 线程 进程中的一个执行任务(控制单元),负责当前进程中程序的执行。一个进程至少有一个线程,一个进程可以运行多个线程,多个线程可共享数据。 与进程不同的是同类的多个线程共享进程的堆和方法区资源,但每个线程有自己的程序计数器、虚拟机栈和本地方法栈,所以系统在产生一个线程,或是在各个线程之间作切换工作时,负担要比进程小得多,也正因为如此,线程也被称为轻量级进程。 Java 程序天生就是多线程程序,我们可以通过 JMX 来看一下一个普通的 Java 程序有哪些线程,代码如下。 [代码] 上述程序输出如下(输出内容可能不同,不用太纠结下面每个线...
Python
2026-01-11
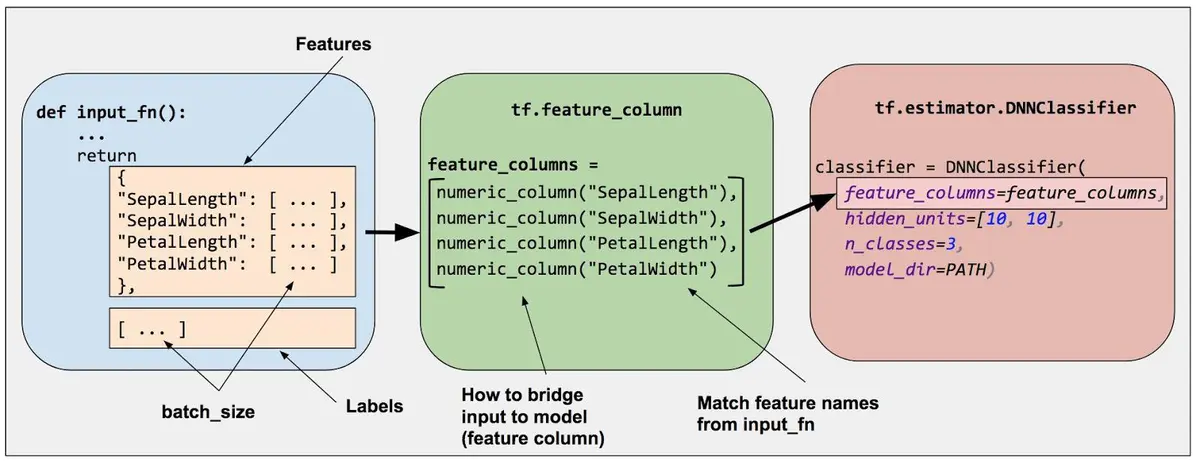
Overview 特征工程是机器学习流程中重要的一个环节,即使是通常用来做端到端学习的深度学习模型在训练之前也免不了要做一些特征工程相关的工作。Tensorflow平台提供的FeatureColumn API为特征工程提供了强大的支持。 Feature cloumns是原始数据和Estimator模型之间的桥梁,它们被用来把各种形式的原始数据转换为模型能够使用的格式。深度神经网络只能处理数值数据,网络中的每个神经元节点执行一些针对输入数据和网络权重的乘法和加法运算。然而,现实中的有很多非数值的类别数据,比如产品的品牌、类目等,这些数据如果不加转换,神经网络是无法处理的。另一方面,即使是数值数据,在仍给网络进行训练之前有时也需要做一些处理,比如标准化、离散化等。 在Tensorflow中,通过...
DFS
Reinforcement Learning
2026-01-11

引言与背景 蒙特卡洛方法是强化学习中的重要算法类别,它标志着从基于模型到无模型算法的转变。这类算法不依赖环境模型,而是通过与环境的直接交互获取经验数据来学习最优策略。 蒙特卡洛方法在强化学习算法谱系中处于"无模型"方法的起始位置,是从基于模型的方法(如值迭代和策略迭代)向无模型方法过渡的第一步。 无模型强化学习的核心理念可以简述为:如果没有模型,我们必须有数据;如果没有数据,我们必须有模型;如果两者都没有,我们就无法找到最优策略。在强化学习中,"数据"通常指智能体与环境交互的经验。 均值估计问题 在介绍蒙特卡洛强化学习算法之前,我们首先需要理解均值估计问题,这是理解从数据而非模型中学习的基础。 考虑一个可以取有限实数集合 X 中值的随机变量 X ,我们的任务是计算 X 的均值或期望值: E[...
Python
2026-01-11
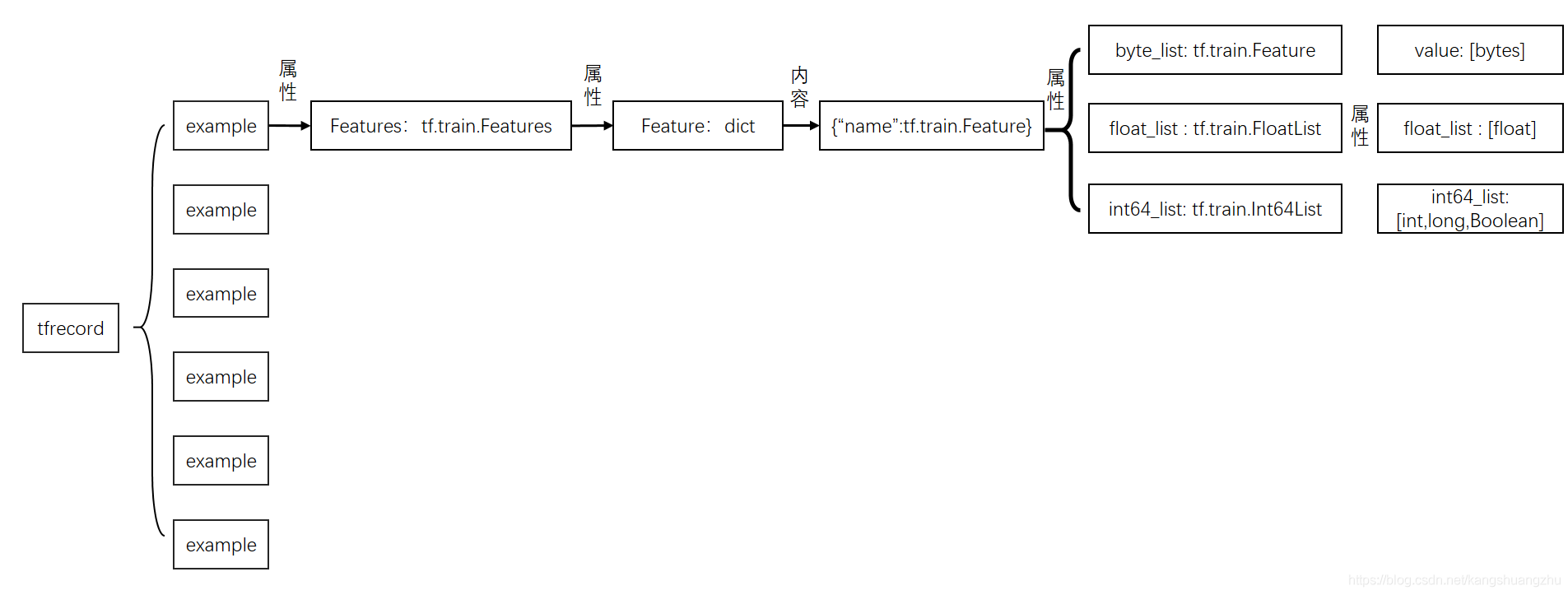
TFRecord TFRecord 是谷歌推荐的一种二进制文件格式,理论上它可以保存任何格式的信息。 tf.Example是一个Protobuffer定义的message,表达了一组string到bytes value的映射。TFRecord文件里面其实就是存储的序列化的tf.Example。关于Protobuffer参考Protobuf 终极教程。 example 我们可以具体到相关代码去详细地看下tf.Example的构成。作为一个Protobuffer message,它被定义在文件core/example/example.proto中: [代码] 只是包了一层Features的message。我们还需要进一步去查找Features的message定义: [代码] 到这里,我们可以看出...
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...
Reinforcement Learning
2026-01-11
引言与背景 价值函数方法是强化学习中的核心技术,它解决了传统表格方法在处理大型状态或动作空间时的效率问题。本文探讨了从表格表示向函数表示的转变,这是强化学习算法发展的重要里程碑。 在强化学习的发展路径中,价值函数方法位于从基于模型到无模型、从表格表示到函数表示的演进过程中。它结合了时序差分学习的思想,并通过函数近似技术来处理复杂环境。 价值表示:从表格到函数 表格与函数表示的对比 传统的表格方法将状态值存储在一个表格中: 而函数近似方法则使用参数化函数来表示这些值,例如: [公式] 其中 [Math] 称作是状态 s 的特征向量, w 是参数向量。 两种不同的表现形式的区别主要体现在以下几个方面: 值的检索方式 值的更新方式 函数复杂度与近似能力 函数的复杂度决定了其近似的能力: 一阶线性函...
杂七杂八
2026-01-11
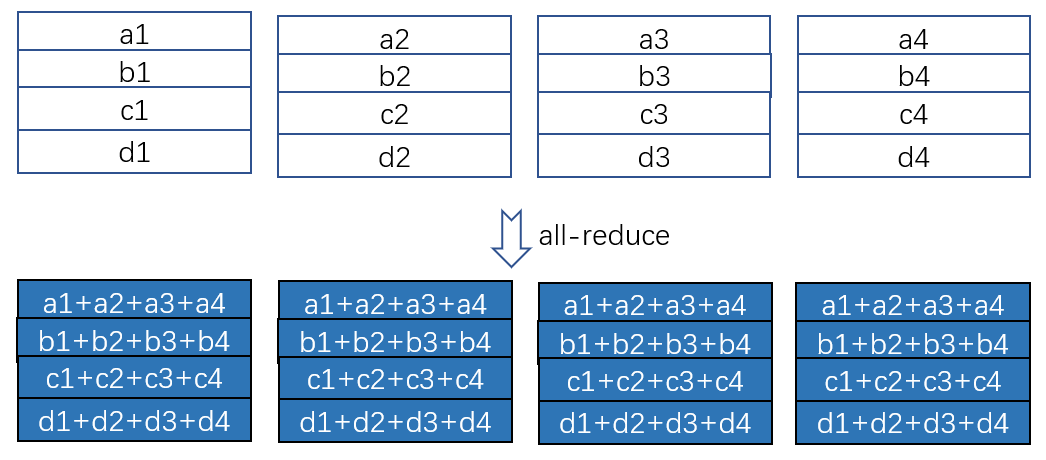
分布式深度学习里的通信严重依赖于规则的集群通信,诸如 allreduce, reducescatter, allgather 等,因此,实现高度优化的集群通信,以及根据任务特点和通信拓扑选择合适的集群通信算法至关重要。 本文以数据并行经常使用的 allreduce 为例来展示集群通信操作的数学性质。 Allreduce 在干什么? 如图 1 所示,一共 4个设备,每个设备上有一个矩阵(为简单起见,我们特意让每一行就一个元素),allreduce 操作的目的是,让每个设备上的矩阵里的每一个位置的数值都是所有设备上对应位置的数值之和。 如图 2 所示, allreduce 可以通过 reducescatter 和 allgather 这两个更基本的集群通信操作来实现。基于 ring 状通信可以高...
Algorithm
2026-01-11
题目 给定一个无序的数组,找出数组在排序之后,相邻元素之间最大的差值。 如果数组元素个数小于 2,则返回 0。 Example 1: [代码] 解题思路:如果进行排序,这里会超时。采用桶排序 排序算法 的思想,可以在线性时间解决。 1. 首先建立桶,每个桶中只需要存放这个桶中元素的最大值和最小值。 1. 我们期望将数组中的各个数等距离分配,也就是每个桶的长度相同,也就是对于所有桶来说,桶内最大值减去桶内最小值都是一样的。可以当成公式来记。 1. 确定桶的数量,最后的加一保证了数组的最大值也能分到一个桶。为什么需要这样规定桶的尺寸呢?因为这样可以让最大的间距的两个元素在两个不同的桶中。可以证明一下,因为我们用元素范围之差除以元素个数,所以桶的尺寸就是平均的元素间距,显然最大间距的两个元素不可能...
Algorithm
2026-01-11
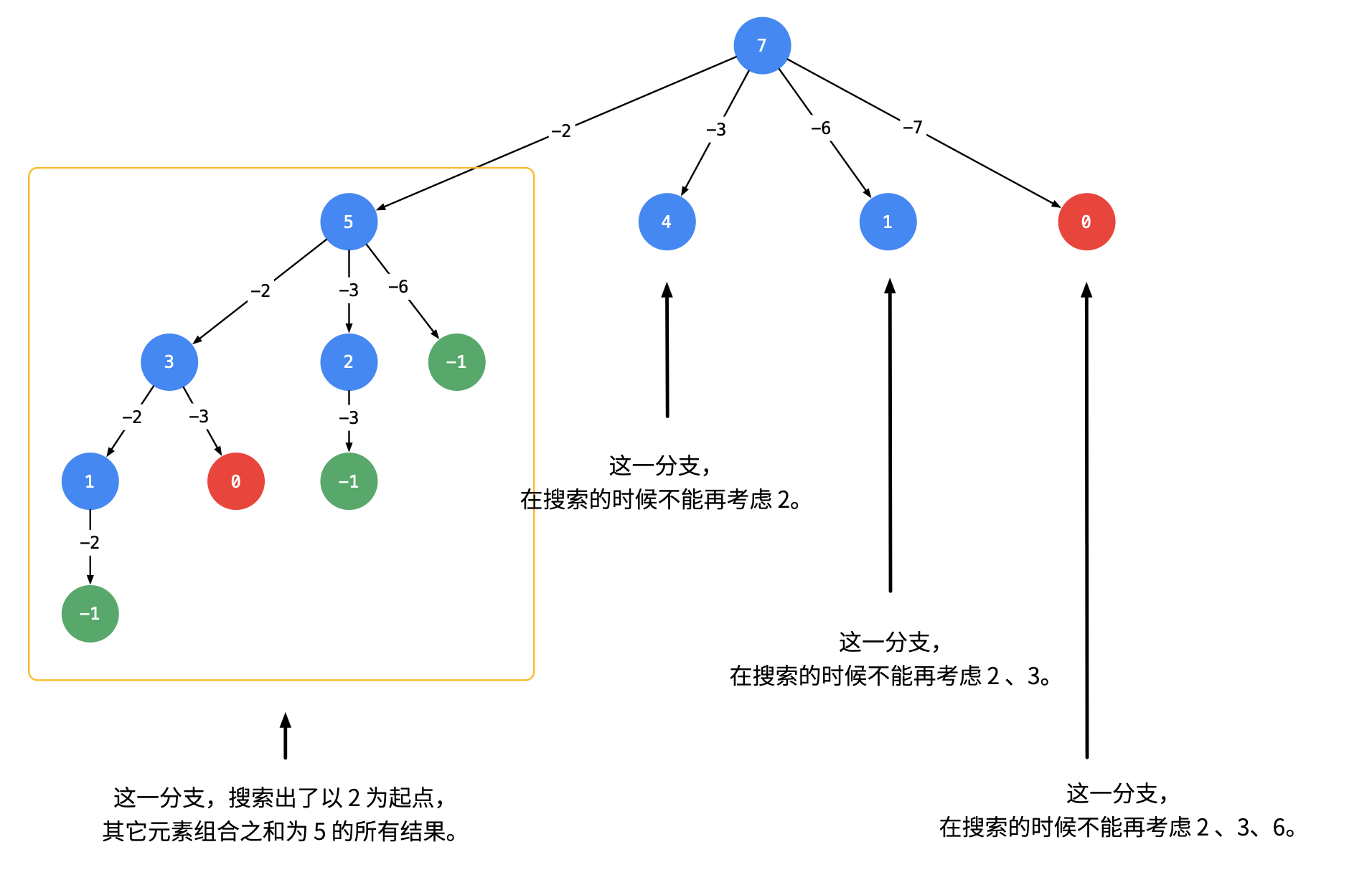
1. 可以重复选取 给定一个无重复元素的数组 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的数字可以无限制重复被选取。 画出树状搜索图如下, 为了去除重复的情况, 我们需要按照某种顺序搜索,具体做法是:每一次搜索的时候,设置下一轮搜索的起点 [代码] 2. 不能被重复选取 与上面的区别在于 1. index每次不要重复搜索,而是去寻找下一个 1. 排除重复的元素 [代码]
Reinforcement Learning
2026-01-11

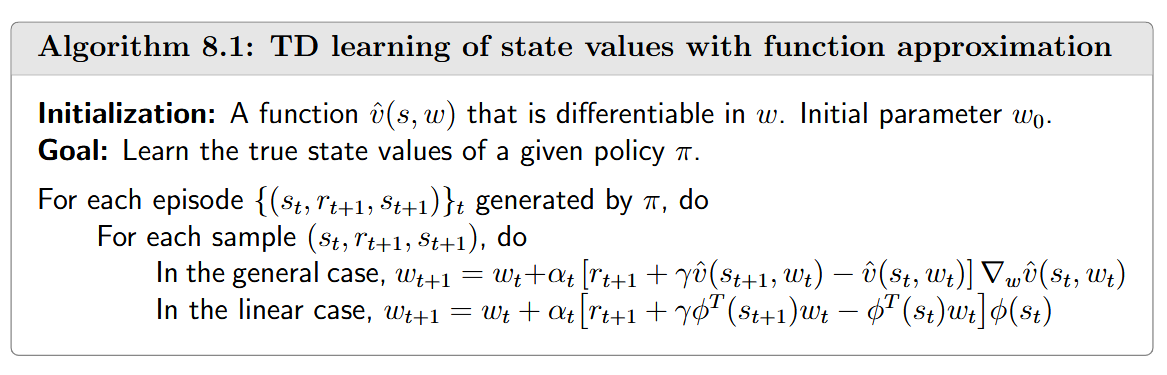
引言 时序差分(TemporalDifference,TD)方法是强化学习中的一类核心算法,它结合了动态规划与蒙特卡洛方法的优点。TD方法是无模型(modelfree)学习方法,不需要环境模型即可学习价值函数和最优策略。 TD方法的核心特点是通过比较不同时间步骤的估计值之间的差异来更新价值函数,这种差异被称为"时序差分误差"(TD error)。TD方法可以被视为解决贝尔曼方程或贝尔曼最优方程的特殊随机逼近算法。 基础TD算法:状态值函数学习 给定策略 [Math] ,基础TD算法用于估计状态值函数 [Math] 。假设我们有一些按照策略 [Math] 生成的经验样本 (s_0, r_1, s_1, ..., s_t, r_{t+1}, s_{t+1}, ...) ,TD算法的更新规则为: ...
01背包 描述 有N件物品和一个容量为V的背包。 第i件物品的体积是vi,价值是wi。 求解将哪些物品装入背包,可使这些物品的总体积不超过背包流量,且总价值最大。 二维动态规划 f[i][j] 表示只看前i个物品,总体积是j的情况下,总价值最大是多少。 result = max(f[n][0V]) f[i][j]: 不选第i个物品:f[i][j] = f[i1][j]; 选第i个物品:f[i][j] = f[i1][jv[i]] + w[i](v[i]是第i个物品的体积) 两者之间取最大。 初始化:f[0][0] = 0 代码如下: [代码] 一维动态优化 从上面二维的情况来看,f[i] 只与f[i1]相关,因此只用使用一个一维数组[0v]来存储前一个状态。那么如何来实现呢? 第一个问题:状...