
简介 这篇文章的思路就是之前的工作都是在利用历史信息和当前时刻的信息,而这篇文章就是要预测未来的信息来结合历史信息做分类。整体框架采用的lstm。 方法 传统的RNN或者LSTM并不能接收未来的信息,所以作者设计了一个TRN Cell为一个循环单元,TRN Cell 的算法流程如下: 右侧的可以横过来看,输入是大lstm中的隐状态h(文中把大的lstm称作Encoder),以h为输入再经过小的lstm,将输出连接起来构成future信息。 再解释一下就是,endcoder中得到了时间t的信息,那以t的信息为输入,再经过序列lstm,每个输出就可以看作是对未来 t+1...t+l_d 的预测,这些预测再经过一个FC层和 t 时刻的结合起来,作用于encoder的下一时序。 从Loss的角度来说...
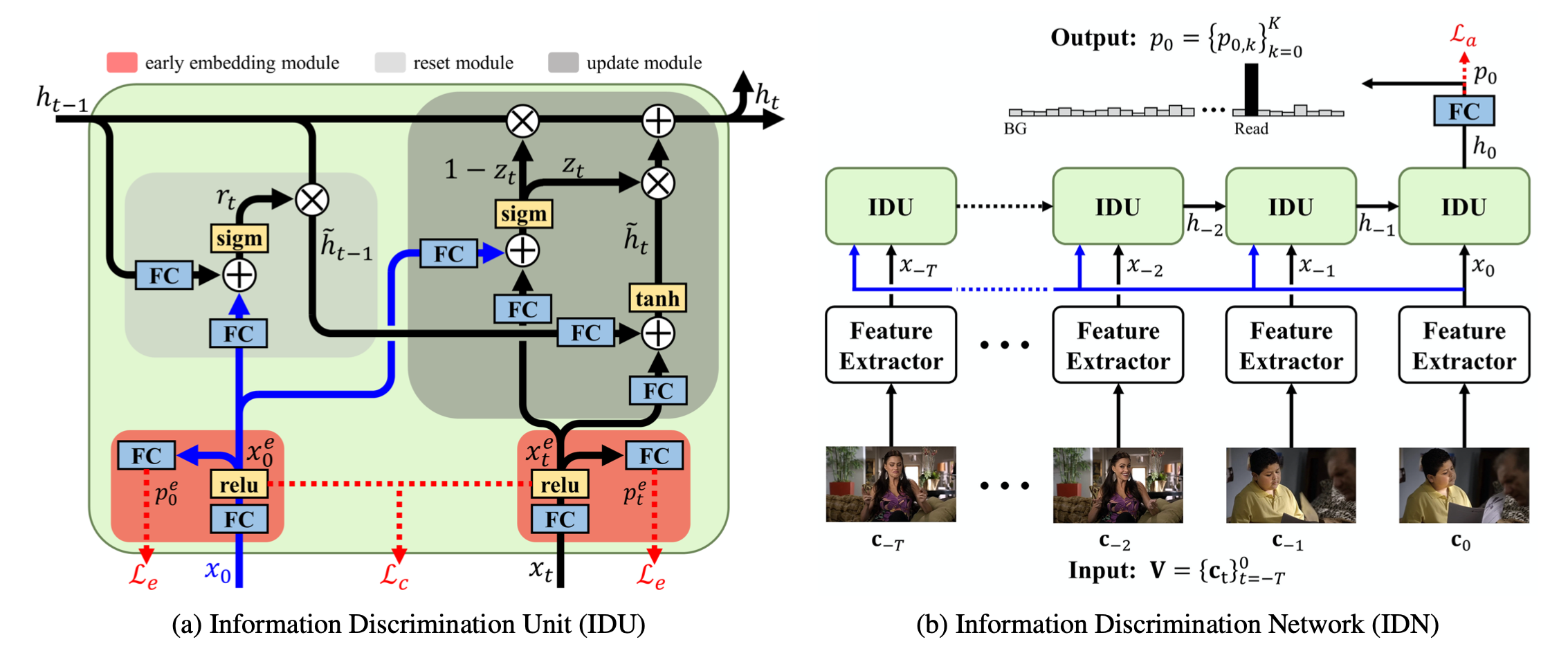
简介 这篇文章主要的动机是,之前的RNN,LSTM,GRU这样的循环结构中,循环单元累计历史输入,但忽视了其与当前动作的联系,所以不能得到一个有效的判别性的表示。 Specifically, the recurrent unit accumulates the input information without explicitly considering its relevance to the current action, and thus the learned representation would be less discriminative. 所以, 这篇文章就是在探索是否可以学习一个判别性较强的表示区分相关和不相关的信息以检测当前要动作。 how RNNs can lear...
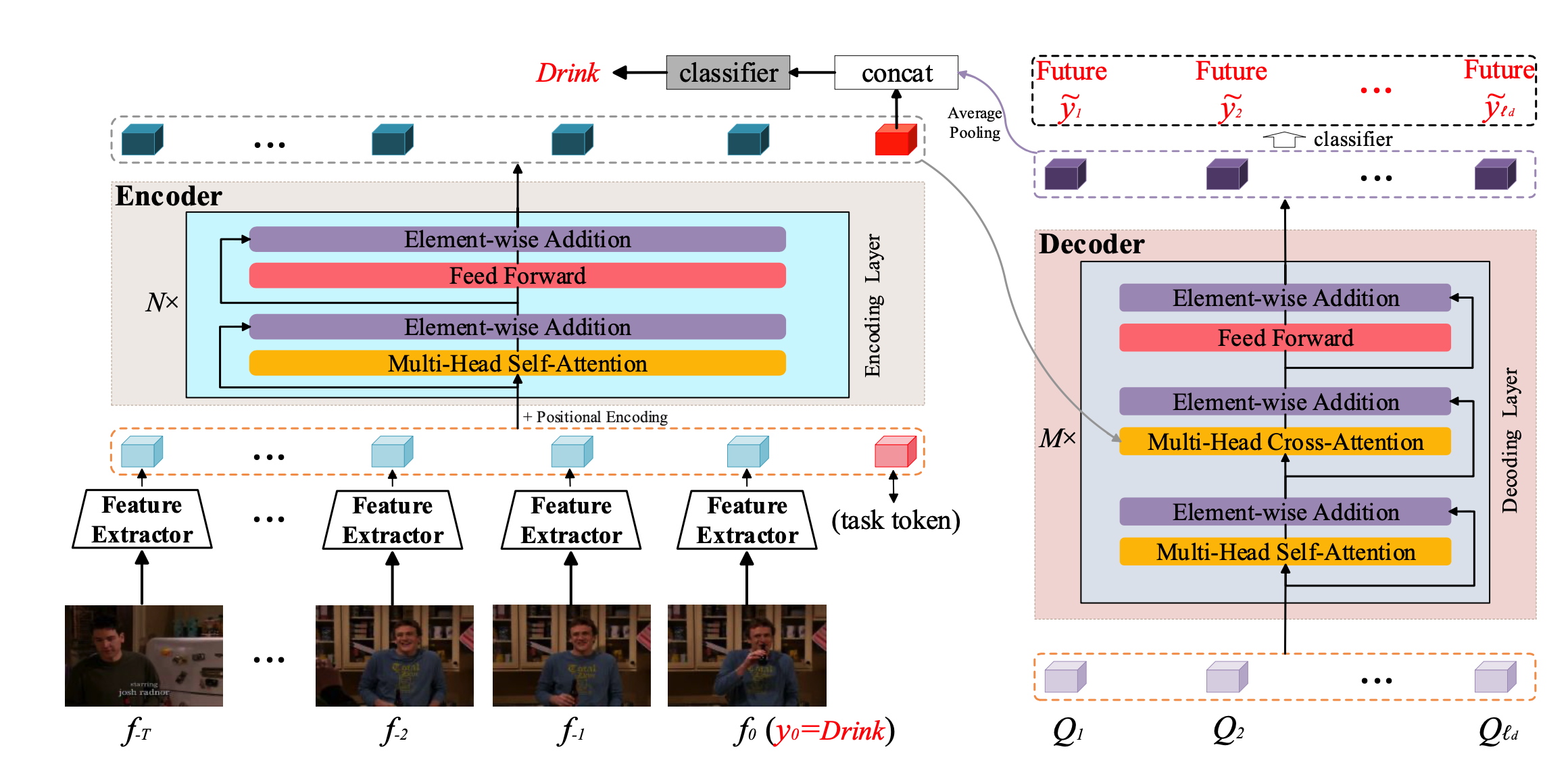
简介 之前的很多方法都是用RNN的结构去构建时序上的依赖关系,但是RNN的结构的缺点是不能并行操作,且存在梯度消失的现象。所以本文就是将之前的RNN的结构改为Transfomer的形式。延续了之前TRN的整个网络的框架,也是结合了对未来帧的预测与历史帧的表示相结合来对当前的动作进行预测。 方法 整个网络框架如上图所示, Encoder就是利用transfomer对longrange的历史和目前帧进行特征表示,其中要说明的一个点就是,这里的特征空间包含T个历史特征,当前窗口的特征以及一个task token,这个task token的作用可以从下图看出来 这幅图对比的是输入进classifier的特征与网络输入的特征的相似性,可以看出w/o task token 对应的是当前t=0时刻的特征,...
3D Model
2026-01-11
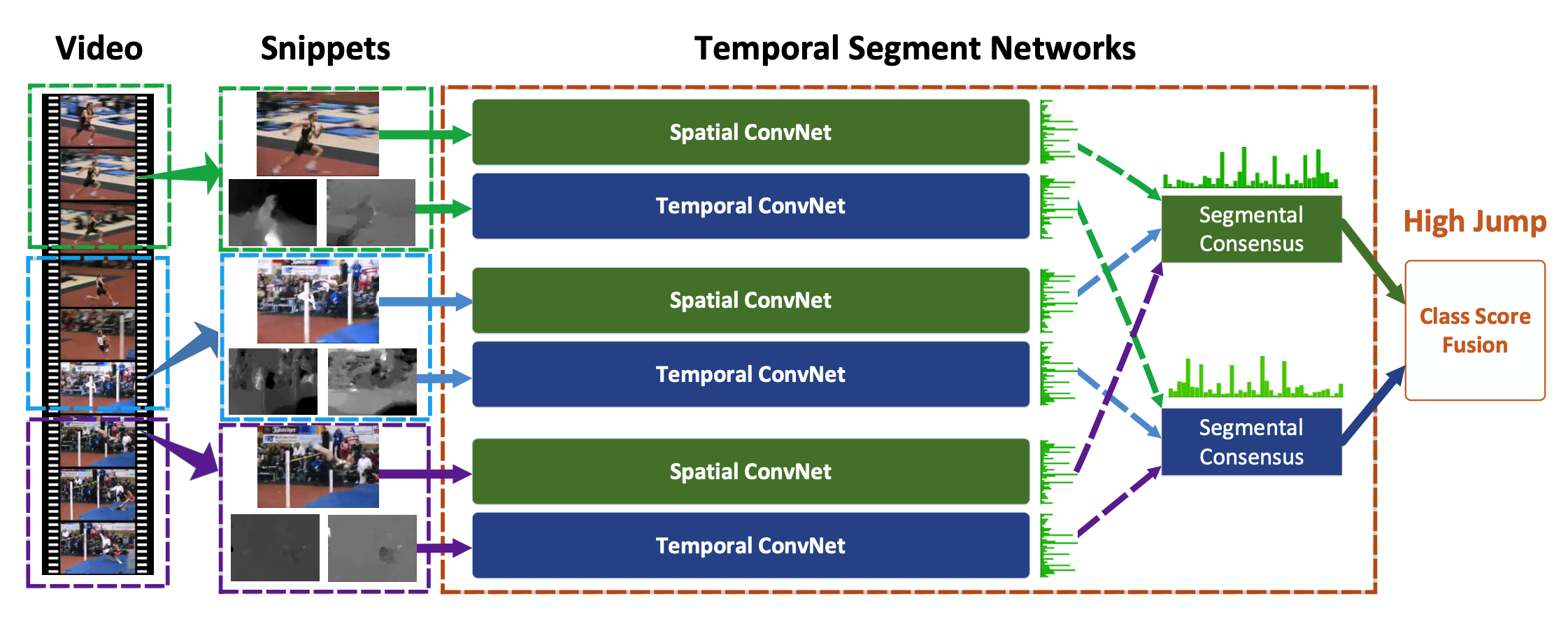
简介 这篇ECCV2016的文章主要提出TSN(temporal segment network)结构用来做视频的动作识别。TSN可以看做是双流(two stream)系列的改进,在此基础上,文章要解决两个问题:1、是longrange视频的行为判断问题(有些视频的动作时间较长)。2、是解决数据少的问题,数据量少会使得一些深层的网络难以应用到视频数据中,因为过拟合会比较严重。 针对第一个问题,首先,为什么目前的双流结构网络难以学习到视频的长时间信息?因为其针对的主要是单帧图像或者短时间内的一堆帧图像数据,但这对于时间跨度较长的视频动作检测而言是不够的。因此采用更加密集的图像帧采样方式来获取视频的长时间信息是比较常用的方法,但是这样做会增加不少时间成本,同时作者发现视频的连续帧之间存在冗余,因...
3D Model
2026-01-11
Related Work: 大概过一下之前的几个重要工作(也是本文性能对比的主要几个stateoftheart): 1. TSN:视频动作/行为识别的基本框架,将视频帧下采样(分成K个Segment,各取一帧)后接2D CNN对各帧进行处理+fusion 1. TRN:对视频下采样出来的 frames 的deep feature,使用 MLP 来融合,建立帧间temporal context 联系。最后将多级(不同采样率)出来的结果进行再一步融合,更好表征shortterm 和 longterm 关系。 1. ECO系列: 1. NL I3D+GCN:使用 nonlocal I3D来捕获longrange时空特征,使用 spacetime region graphs 来获取物体区域间的关联及...
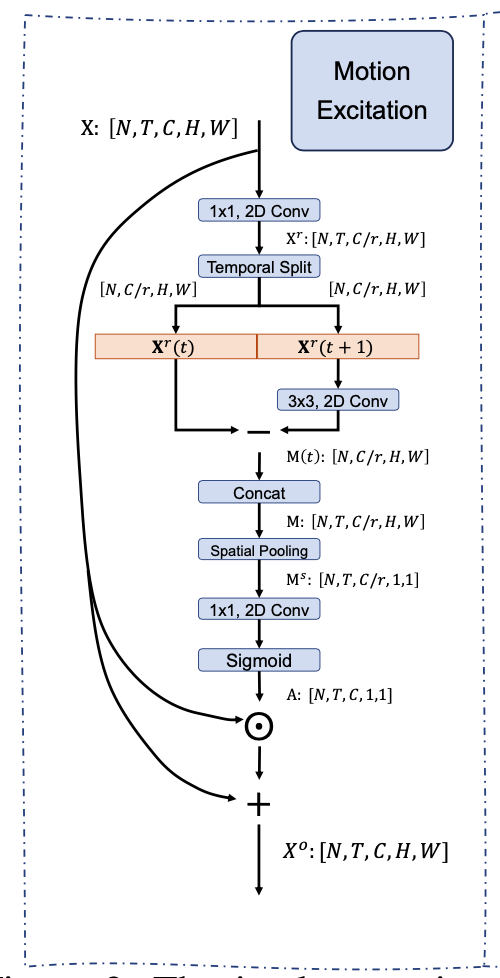
Motivation Motion feature 学习过程中存在的问题: 利用 optical flow 存储和计算的开销太大 现阶段的网络设计,spatiotemporal 建模 和Motion feature 建模分离 比如STM 直接 Add spatio temporal feature 和 motion encoding feature TEA 的 ME 则利用了 Motion feature 做 channeI attention 过去的建模都 focus 在 framelevel motion,更好的建模方式 featurelevel motion 长时建模存在的问题: 单帧过backbone,最后的feature 进行 temporal max/average poolin...
3D Model
2026-01-11

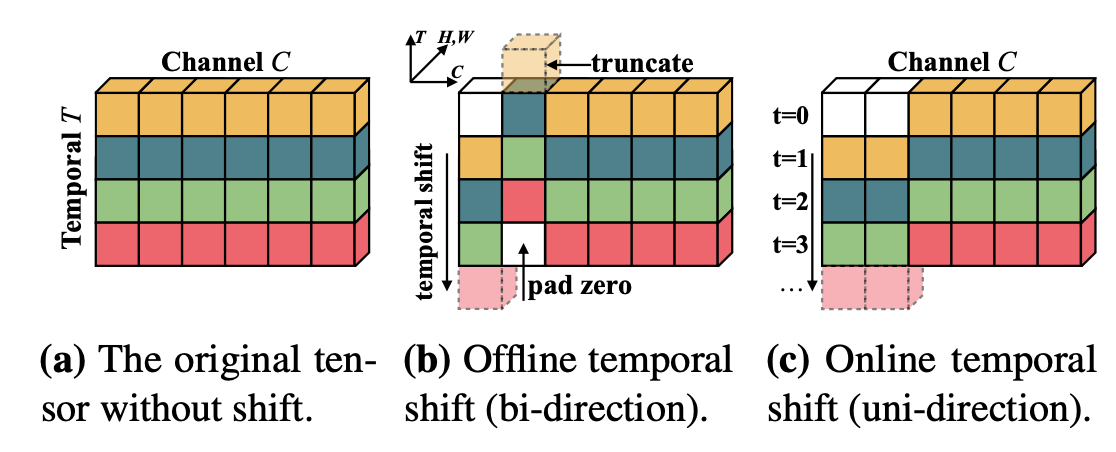
研究动机 目前 3Dbased 的方法在大规模的 scenebased 的数据集(如kinetics)上相对于2D的方法取得了更好的效果,但是3Dbased也存在一些明显的问题: 3Dbased 的网络参数量大,计算开销大,训练的 scheduler 更长,inference latency 明显慢于 2Dbased 的方法。 3D卷积其实并不能很好得学到时序上信息的变化,而且3D卷积学出来的时序Kernel的weight的分布基本一致,更多的还是对时序上的信息做一种 smooth aggregation。这一点在之前的工作TANet 中有比较详细的讨论。也基于此,3Dbased 的网络在SomethingSomething这种对时序信息比较敏感的video数据集上并不能取得很好的效果( 得...
3D Model
2026-01-11

Classification,Detection Classification:给定预先裁剪好的视频片段,预测其所属的行为类别 Detection:视频是未经过裁剪的,需要先进行人的检测where和行为定位(分析行为的始末时间)when,再进行行为的分类what。 通常所说的行为识别更偏向于对时域预先分割好的序列进行行为动作的分类,即 Trimmed Video Action Classification。 TwoStream Twostream convolutional networks 简介 TwoStream CNN网络顾名思义分为两个部分, 1. 空间流处理RGB图像,得到形状信息; 1. 时间流/光流处理光流图像,得到运动信息。 两个流最后经过softmax后,做分类分数的融合,...
Large Model
2026-01-11

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路,丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存...
NLP
2026-01-11

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了Transformer。Transformer 是Google Brain 2017的提出的一篇工...
NLP
2026-01-11

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4,不算太老,而SSM最新最火的变体大概是Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mam...

1. 什么是NGram模型 NGram是一种基于统计语言模型的算法。它的基本思想是将文本里面的内容按照字节进行大小为N的滑动窗口操作,形成了长度是N的字节片段序列。 每一个字节片段称为gram,对所有gram的出现频度进行统计,并且按照事先设定好的阈值进行过滤,形成关键gram列表,也就是这个文本的向量特征空间,列表中的每一种gram就是一个特征向量维度。 该模型基于这样一种假设,第N个词的出现只与前面N1个词相关,而与其它任何词都不相关,整句的概率就是各个词出现概率的乘积。这些概率可以通过直接从语料中统计N个词同时出现的次数得到。常用的是二元的BiGram和三元的TriGram。 说完了ngram模型的概念之后,下面讲解ngram的一般应用。 2. NGram模型用于评估语句是否合理 如果...