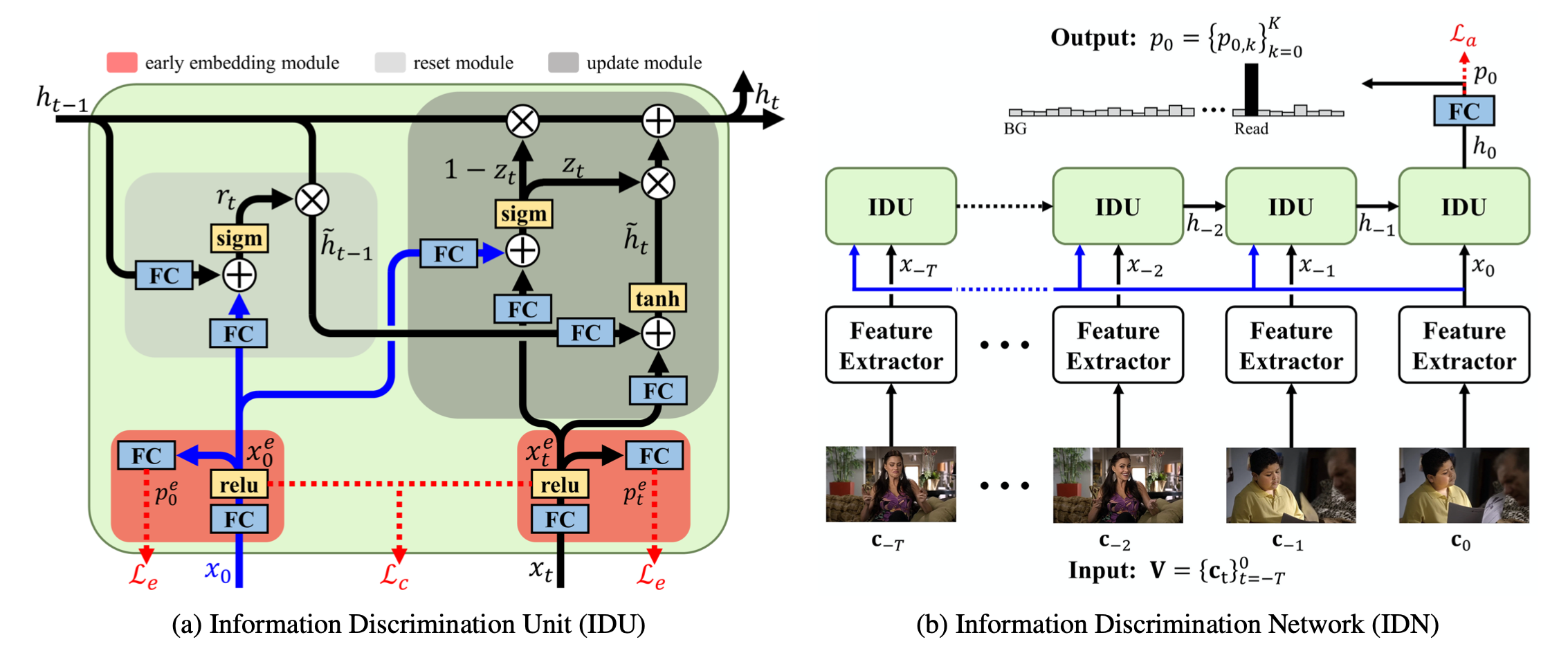
简介 这篇文章主要的动机是,之前的RNN,LSTM,GRU这样的循环结构中,循环单元累计历史输入,但忽视了其与当前动作的联系,所以不能得到一个有效的判别性的表示。 Specifically, the recurrent unit accumulates the input information without explicitly considering its relevance to the current action, and thus the learned representation would be less discriminative. 所以, 这篇文章就是在探索是否可以学习一个判别性较强的表示区分相关和不相关的信息以检测当前要动作。 how RNNs can lear...
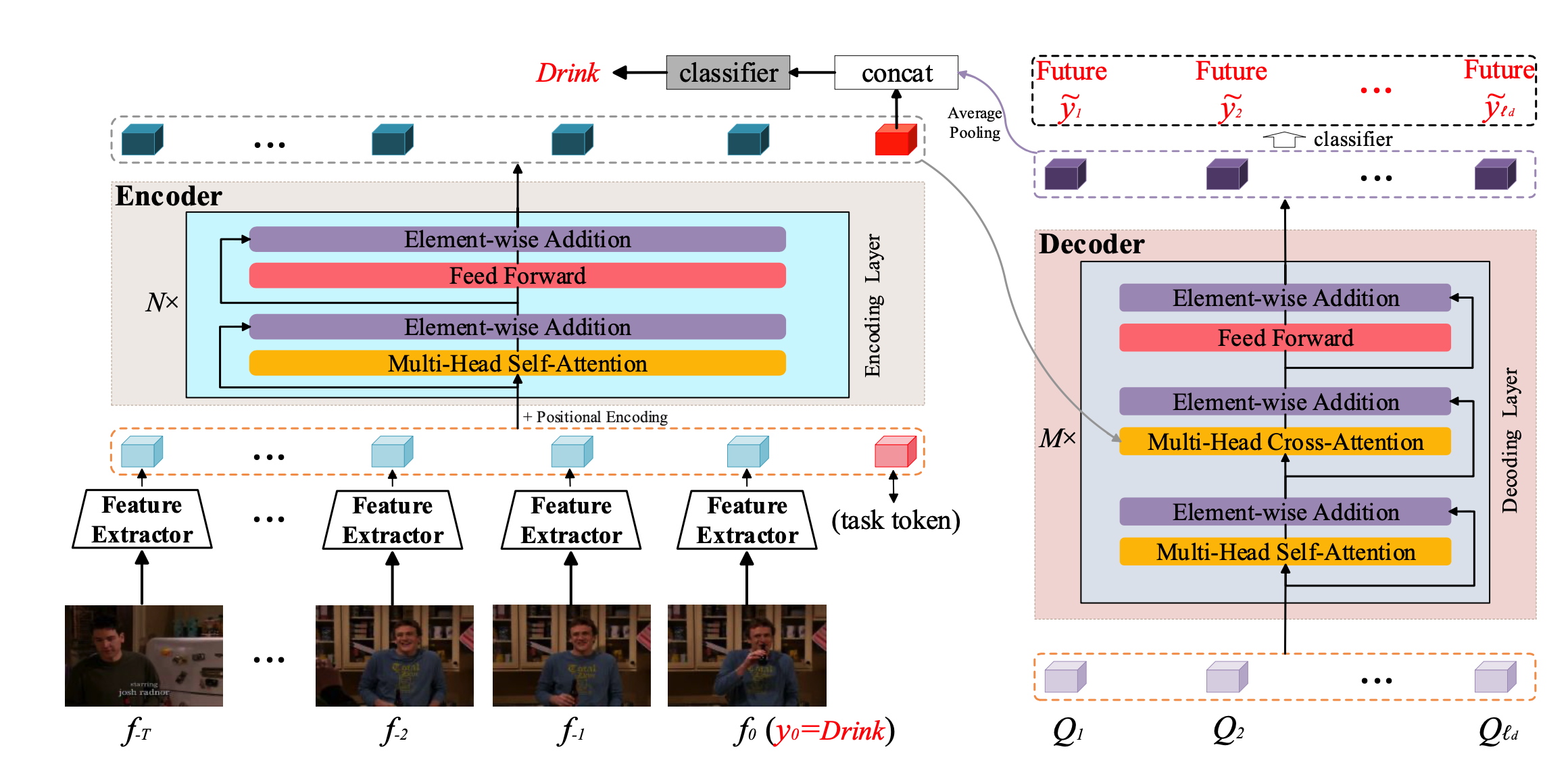
简介 之前的很多方法都是用RNN的结构去构建时序上的依赖关系,但是RNN的结构的缺点是不能并行操作,且存在梯度消失的现象。所以本文就是将之前的RNN的结构改为Transfomer的形式。延续了之前TRN的整个网络的框架,也是结合了对未来帧的预测与历史帧的表示相结合来对当前的动作进行预测。 方法 整个网络框架如上图所示, Encoder就是利用transfomer对longrange的历史和目前帧进行特征表示,其中要说明的一个点就是,这里的特征空间包含T个历史特征,当前窗口的特征以及一个task token,这个task token的作用可以从下图看出来 这幅图对比的是输入进classifier的特征与网络输入的特征的相似性,可以看出w/o task token 对应的是当前t=0时刻的特征,...
3D Model
2026-01-11
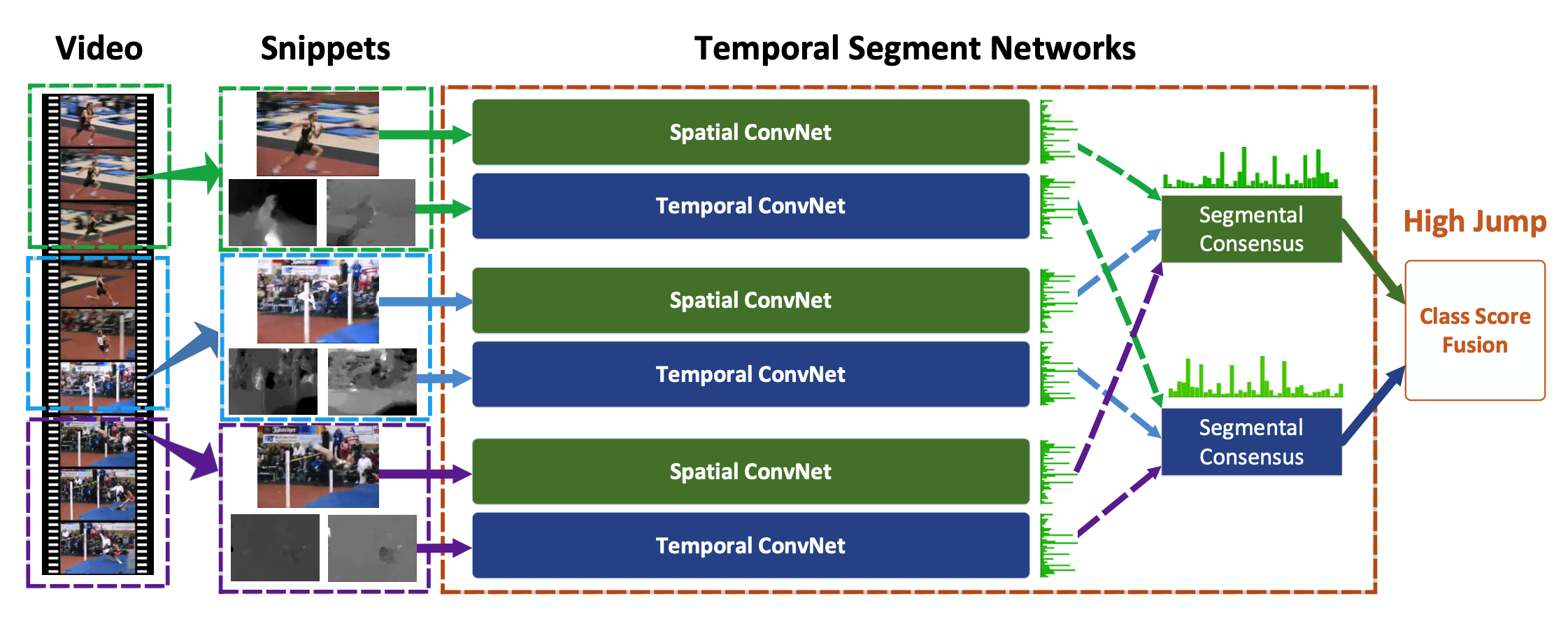
简介 这篇ECCV2016的文章主要提出TSN(temporal segment network)结构用来做视频的动作识别。TSN可以看做是双流(two stream)系列的改进,在此基础上,文章要解决两个问题:1、是longrange视频的行为判断问题(有些视频的动作时间较长)。2、是解决数据少的问题,数据量少会使得一些深层的网络难以应用到视频数据中,因为过拟合会比较严重。 针对第一个问题,首先,为什么目前的双流结构网络难以学习到视频的长时间信息?因为其针对的主要是单帧图像或者短时间内的一堆帧图像数据,但这对于时间跨度较长的视频动作检测而言是不够的。因此采用更加密集的图像帧采样方式来获取视频的长时间信息是比较常用的方法,但是这样做会增加不少时间成本,同时作者发现视频的连续帧之间存在冗余,因...
3D Model
2026-01-11
Related Work: 大概过一下之前的几个重要工作(也是本文性能对比的主要几个stateoftheart): 1. TSN:视频动作/行为识别的基本框架,将视频帧下采样(分成K个Segment,各取一帧)后接2D CNN对各帧进行处理+fusion 1. TRN:对视频下采样出来的 frames 的deep feature,使用 MLP 来融合,建立帧间temporal context 联系。最后将多级(不同采样率)出来的结果进行再一步融合,更好表征shortterm 和 longterm 关系。 1. ECO系列: 1. NL I3D+GCN:使用 nonlocal I3D来捕获longrange时空特征,使用 spacetime region graphs 来获取物体区域间的关联及...
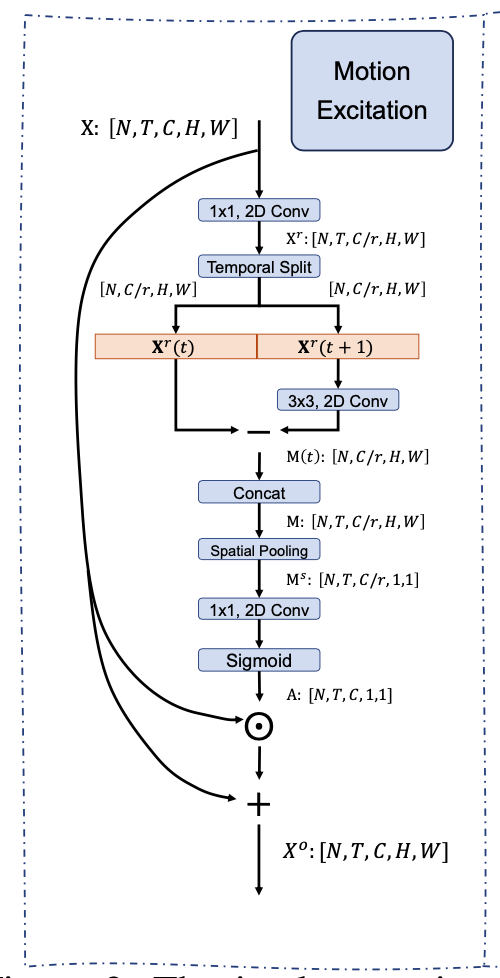
Motivation Motion feature 学习过程中存在的问题: 利用 optical flow 存储和计算的开销太大 现阶段的网络设计,spatiotemporal 建模 和Motion feature 建模分离 比如STM 直接 Add spatio temporal feature 和 motion encoding feature TEA 的 ME 则利用了 Motion feature 做 channeI attention 过去的建模都 focus 在 framelevel motion,更好的建模方式 featurelevel motion 长时建模存在的问题: 单帧过backbone,最后的feature 进行 temporal max/average poolin...
3D Model
2026-01-11

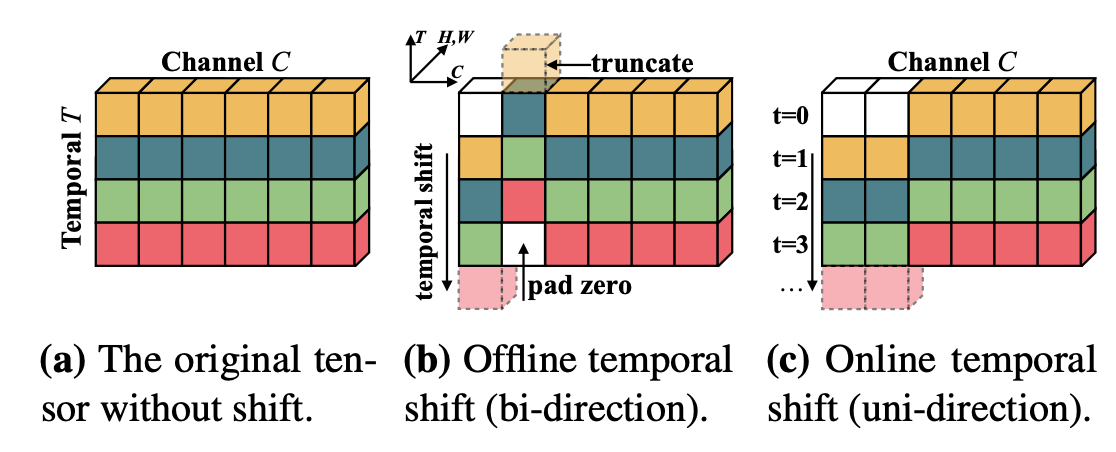
研究动机 目前 3Dbased 的方法在大规模的 scenebased 的数据集(如kinetics)上相对于2D的方法取得了更好的效果,但是3Dbased也存在一些明显的问题: 3Dbased 的网络参数量大,计算开销大,训练的 scheduler 更长,inference latency 明显慢于 2Dbased 的方法。 3D卷积其实并不能很好得学到时序上信息的变化,而且3D卷积学出来的时序Kernel的weight的分布基本一致,更多的还是对时序上的信息做一种 smooth aggregation。这一点在之前的工作TANet 中有比较详细的讨论。也基于此,3Dbased 的网络在SomethingSomething这种对时序信息比较敏感的video数据集上并不能取得很好的效果( 得...
3D Model
2026-01-11

Classification,Detection Classification:给定预先裁剪好的视频片段,预测其所属的行为类别 Detection:视频是未经过裁剪的,需要先进行人的检测where和行为定位(分析行为的始末时间)when,再进行行为的分类what。 通常所说的行为识别更偏向于对时域预先分割好的序列进行行为动作的分类,即 Trimmed Video Action Classification。 TwoStream Twostream convolutional networks 简介 TwoStream CNN网络顾名思义分为两个部分, 1. 空间流处理RGB图像,得到形状信息; 1. 时间流/光流处理光流图像,得到运动信息。 两个流最后经过softmax后,做分类分数的融合,...
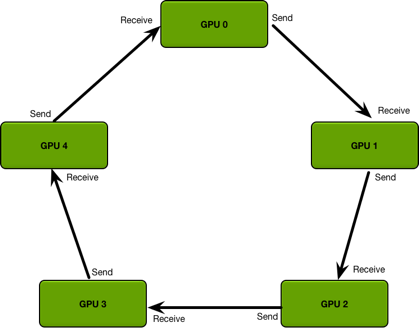
Quick Start 一个最简单的DDP Pytorch例子! 环境准备 PyTorch(gpu)=1.5,python=3.6 推荐使用官方打好的PyTorch docker,避免乱七八糟的环境问题影响心情。 [代码] 代码 单GPU代码 [代码] 加入DDP的代码 [代码] DDP的基本原理 大白话原理 假如我们有N张显卡, 1. (缓解GIL限制)在DDP模式下,会有N个进程被启动,每个进程在一张卡上加载一个模型,这些模型的参数在数值上是相同的。 1. (RingReduce加速)在模型训练时,各个进程通过一种叫RingReduce的方法与其他进程通讯,交换各自的梯度,从而获得所有进程的梯度; 1. (实际上就是Data Parallelism)各个进程用平均后的梯度更新自己的参数,...
Python
2026-01-11
@tf_export为函数取了个名字! Tensorflow经常看到定义的函数前面加了@tf_export。例如,tensorflow/python/platform/app.py中有: [代码] 首先,@tf_export是一个修饰符。修饰符的本质是一个函数 tf_export的实现在tensorflow/python/util/tf_export.py中: [代码] 等号的右边的理解分两步: 1. functools.partial 1. api_export functools.partial是偏函数,它的本质简而言之是为函数固定某些参数。如:functools.partial(FuncA, p1)的作用是把函数FuncA的第一个参数固定为p1;又如functools.partial(...
PyTorch中,所有神经网络的核心是 autograd 包。 autograd 包为张量上的所有操作提供了自动求导机制。它是一个在运行时定义(definebyrun)的框架,这意味着反向传播是根据代码如何运行来决定的,并且每次迭代可以是不同的. 让我们用一些简单的例子来看看吧。 张量 torch.Tensor 是这个包的核心类。如果设置它的属性 .requires_grad 为 True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用 .backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性. 要阻止一个张量被跟踪历史,可以调用 .detach() 方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。 为了防止跟踪历史记录(和使用内存),...
Python
2026-01-11
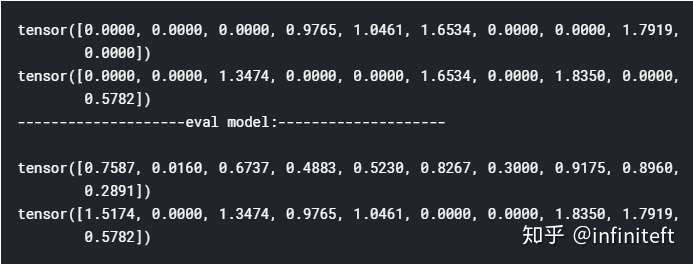
相同点 nn.Xxx和nn.functional.xxx的实际功能是相同的,即nn.Conv2d和nn.functional.conv2d 都是进行卷积,nn.Dropout 和nn.functional.dropout都是进行dropout,。。。。。; 运行效率也是近乎相同。 nn.functional.xxx是函数接口,而nn.Xxx是nn.functional.xxx的类封装,并且nn.Xxx都继承于一个共同祖先nn.Module。这一点导致nn.Xxx除了具有nn.functional.xxx功能之外,内部附带了nn.Module相关的属性和方法,例如train(), eval(),load_state_dict, state_dict 等。 不同点 两者的调用方式不同。 nn.X...
Python
2026-01-11

unsupported operation: more than one element of the writtento tensor refers to a single memory location. Please clone() the tensor before performing the operation. 出现这种情况可能是在.backward()之前使用了 .expand()或者.expand_as()函数。具体原因可以看看这个老哥的提问:link 解决办法:在 .expand()或者.expand_as()函数后面添加.clone()就可以解决。