
Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用(r, θ)两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的(r, θ),在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数(r, θ)就在每条曲线中都存在,所以看起来就像是多条曲线相交在(r,θ)。可以用多条曲线投票的方式来看,其他点都是很少的票数,而(r,θ)则票数很多,所以直线的参数就是(r,θ)。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数...
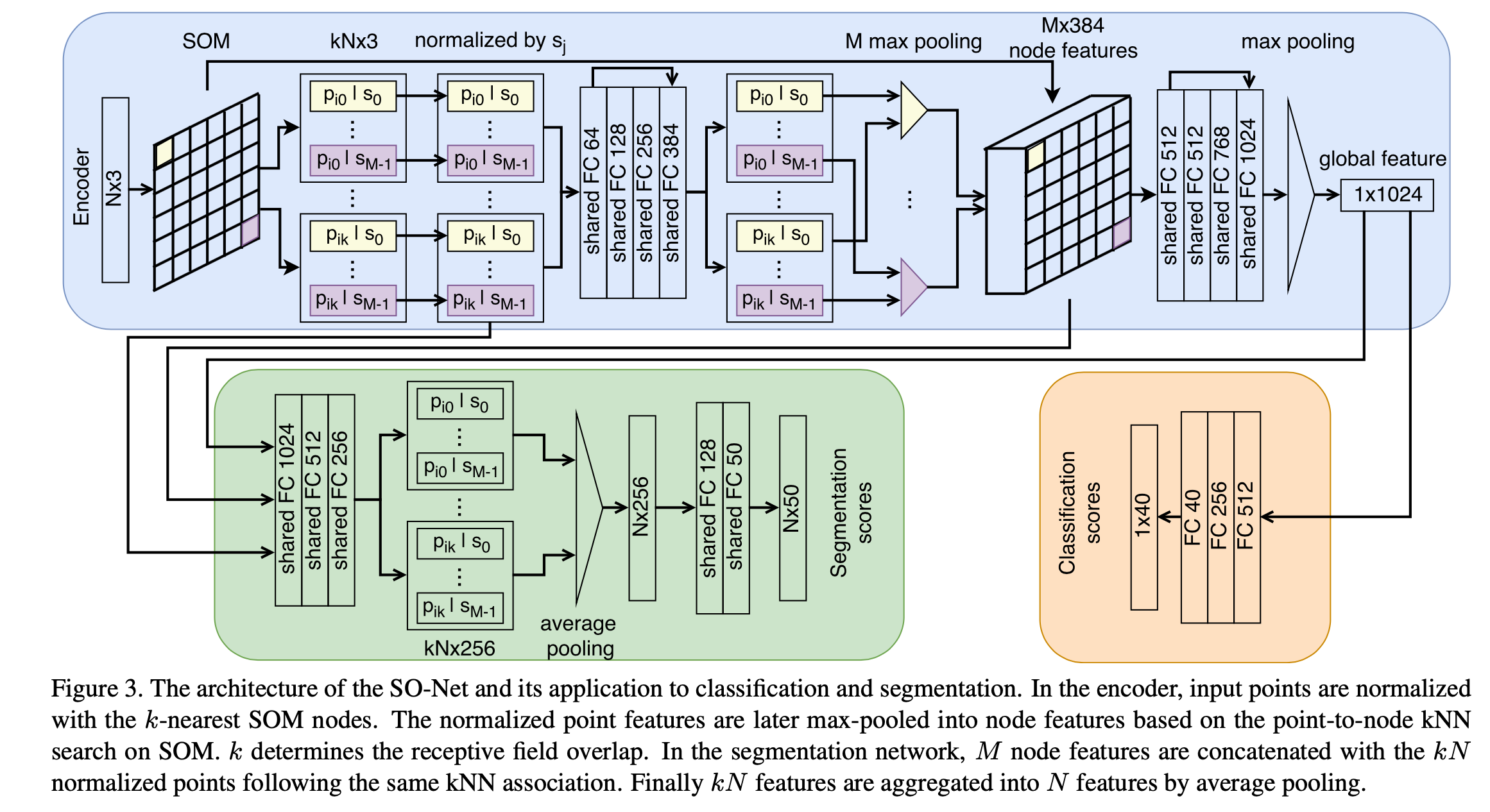
概括 针对一些网络在处理point cloud时的缺点,如:不能对点的空间分布进行建模(例如PointNet++,只是能获取局部信息不能得到局部区域之间的空间关系),提出了SONet。SO的含义是利用Selforganizing map的Net。 结果:它具有能够对点的空间分布进行建模、层次化特征提取、可调节的感受野范围的优点,并能够用于多种任务如重建、分类、分割等等。取得了相似或超过SOTA的性能,因为可并行化和架构简单使得训练速度很快。 贡献: TODO IDEA:作者发现将CNN直接用于SOM图上性能不升反降,为什么(推测:可能是SOM的2D map并不是保持了原本的空间对应关系,可能nodes之间是乱序的,导致用conv2d时精度反而降低)? 难点 如何对local regions之...
3D Model
2026-01-11
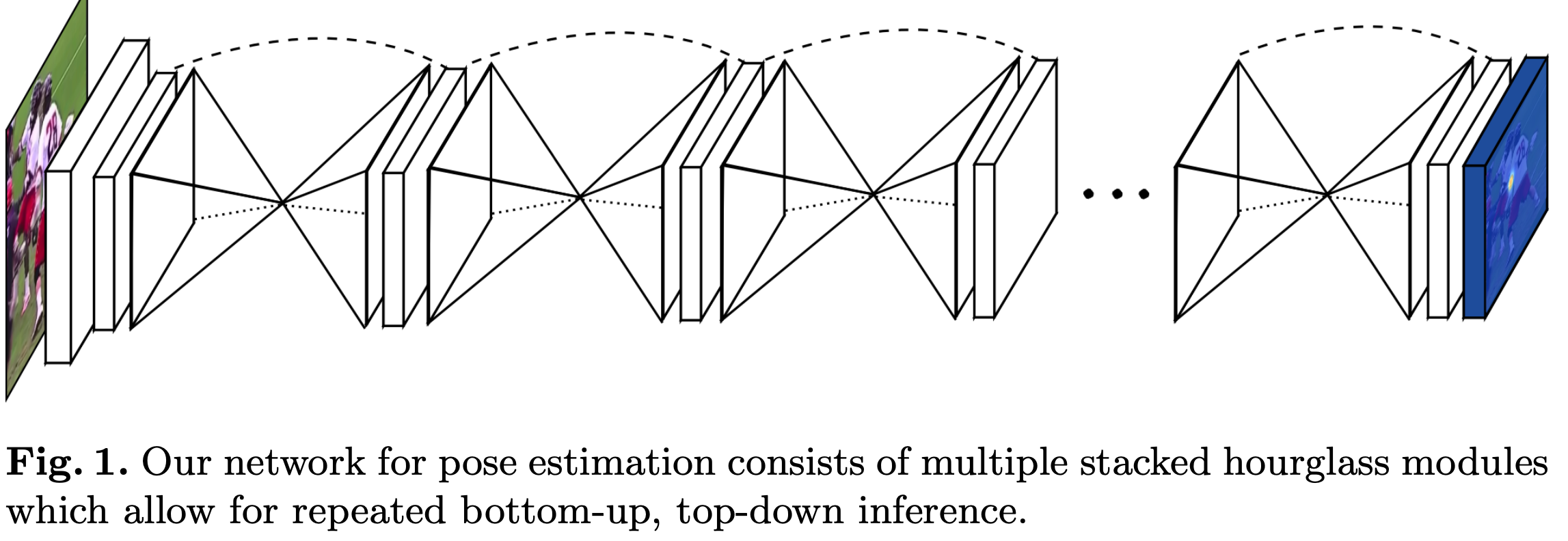
论文介绍了一种新的网络结构用于人体姿态检测,作者在论文中展现了不断重复bottomup、topdown过程以及运用intermediate supervison(中间监督)对于网络性能的提升,下面来介绍Stacked Hourglass Networks. 简介 理解人类的姿态对于一些高级的任务比如行为识别来说特别重要,而且也是一些人机交互任务的基础。作者提出了一种新的网络结构Stacked Hourglass Networks来对人体的姿态进行识别,这个网络结构能够捕获并整合图像所有尺度的信息。之所以称这种网络为Stacked Hourglass Networks,主要是它长得很像堆叠起来的沙漏,如下图所示: 这种堆叠在一起的Hourglass模块结构是对称的,bottomup过程将图片从...
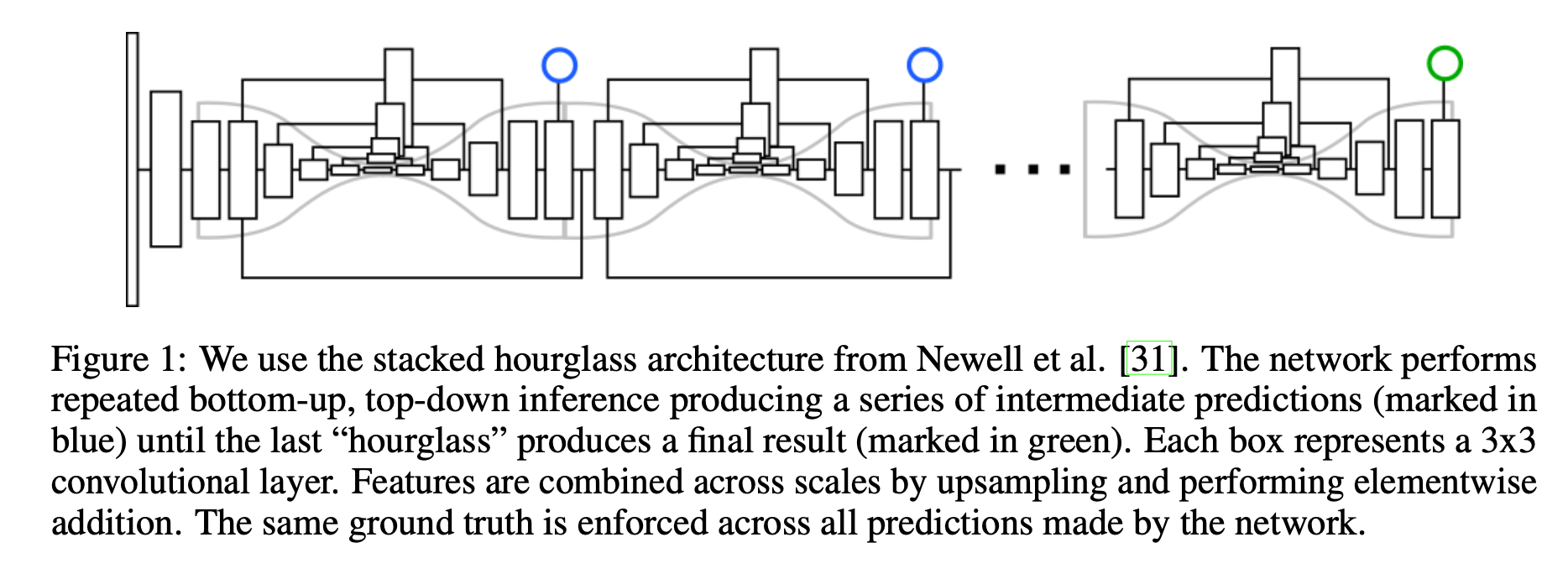
简介 作者认为许多计算机视觉的任务可以看作是检测和分组问题检测一些小的单元,然后将它们组合成更大的单元,例如,多人目标检测可以通过检测人的关节点然后再将它们进行分组(属于同一个人的关节点为一组)解决;实例分割问题可以看作是检测一些相关的像素然后将它们组合成一个目标实例。 Associative Embedding是一种表示关节检测和分组任务的输出的新方法,其基本思想是为每次检测引入一个实数,用作识别对象所属组的“tag”,换句话说,标签将每个检测与同一组中的其他检测相关联。作者使用一个损失函数使得如果相应的检测属于ground truth中的相同组则促使这一对标签具有相似的值。需要注意的是,这里标签具体的值并不重要,重要的是不同标签之间的差异。 这篇其实是源自Stacked Hourglas...
3D Model
2026-01-11

整体流程: [代码] 0. 数据预处理 这个步骤主要是crop四路数据,及生成后续步骤所需要的yaml文件。 1. 四路相机与双路相机标定 内参标定 [代码] 这里主要的函数就是: pts = cv2.findChessboardCorners(img, (board_width, board_height))[1] cv2.cornerSubPix(gray, pts, (12, 12), (1, 1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)) det, intr, dist, _, _ = cv2.calibrateCamera(obj_pts, img_pts, self.imgSize, None, No...
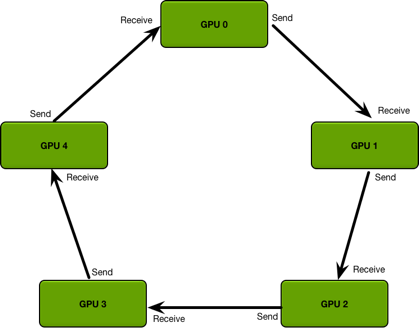
Quick Start 一个最简单的DDP Pytorch例子! 环境准备 PyTorch(gpu)=1.5,python=3.6 推荐使用官方打好的PyTorch docker,避免乱七八糟的环境问题影响心情。 [代码] 代码 单GPU代码 [代码] 加入DDP的代码 [代码] DDP的基本原理 大白话原理 假如我们有N张显卡, 1. (缓解GIL限制)在DDP模式下,会有N个进程被启动,每个进程在一张卡上加载一个模型,这些模型的参数在数值上是相同的。 1. (RingReduce加速)在模型训练时,各个进程通过一种叫RingReduce的方法与其他进程通讯,交换各自的梯度,从而获得所有进程的梯度; 1. (实际上就是Data Parallelism)各个进程用平均后的梯度更新自己的参数,...
Python
2026-01-11
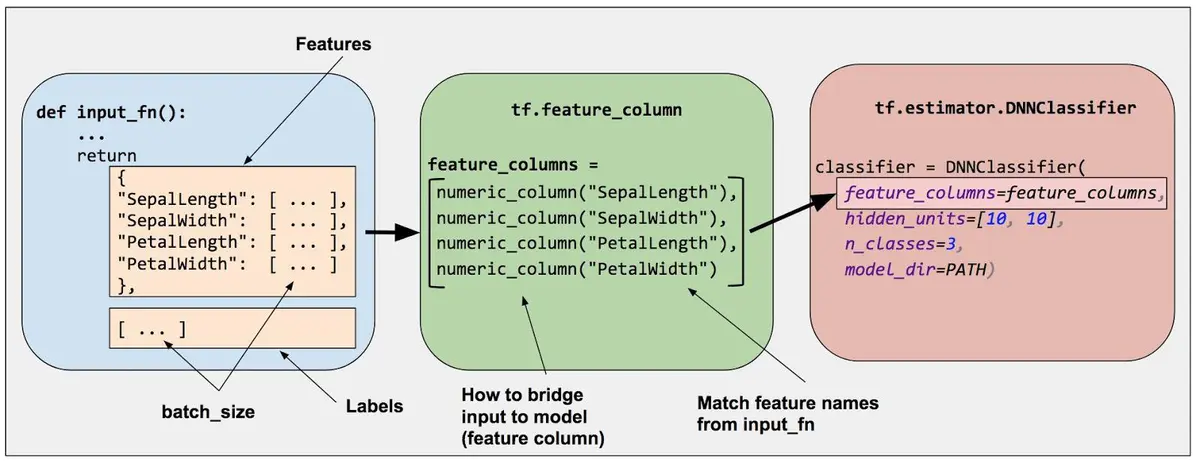
Overview 特征工程是机器学习流程中重要的一个环节,即使是通常用来做端到端学习的深度学习模型在训练之前也免不了要做一些特征工程相关的工作。Tensorflow平台提供的FeatureColumn API为特征工程提供了强大的支持。 Feature cloumns是原始数据和Estimator模型之间的桥梁,它们被用来把各种形式的原始数据转换为模型能够使用的格式。深度神经网络只能处理数值数据,网络中的每个神经元节点执行一些针对输入数据和网络权重的乘法和加法运算。然而,现实中的有很多非数值的类别数据,比如产品的品牌、类目等,这些数据如果不加转换,神经网络是无法处理的。另一方面,即使是数值数据,在仍给网络进行训练之前有时也需要做一些处理,比如标准化、离散化等。 在Tensorflow中,通过...
Python
2026-01-11
@tf_export为函数取了个名字! Tensorflow经常看到定义的函数前面加了@tf_export。例如,tensorflow/python/platform/app.py中有: [代码] 首先,@tf_export是一个修饰符。修饰符的本质是一个函数 tf_export的实现在tensorflow/python/util/tf_export.py中: [代码] 等号的右边的理解分两步: 1. functools.partial 1. api_export functools.partial是偏函数,它的本质简而言之是为函数固定某些参数。如:functools.partial(FuncA, p1)的作用是把函数FuncA的第一个参数固定为p1;又如functools.partial(...
Python
2026-01-11
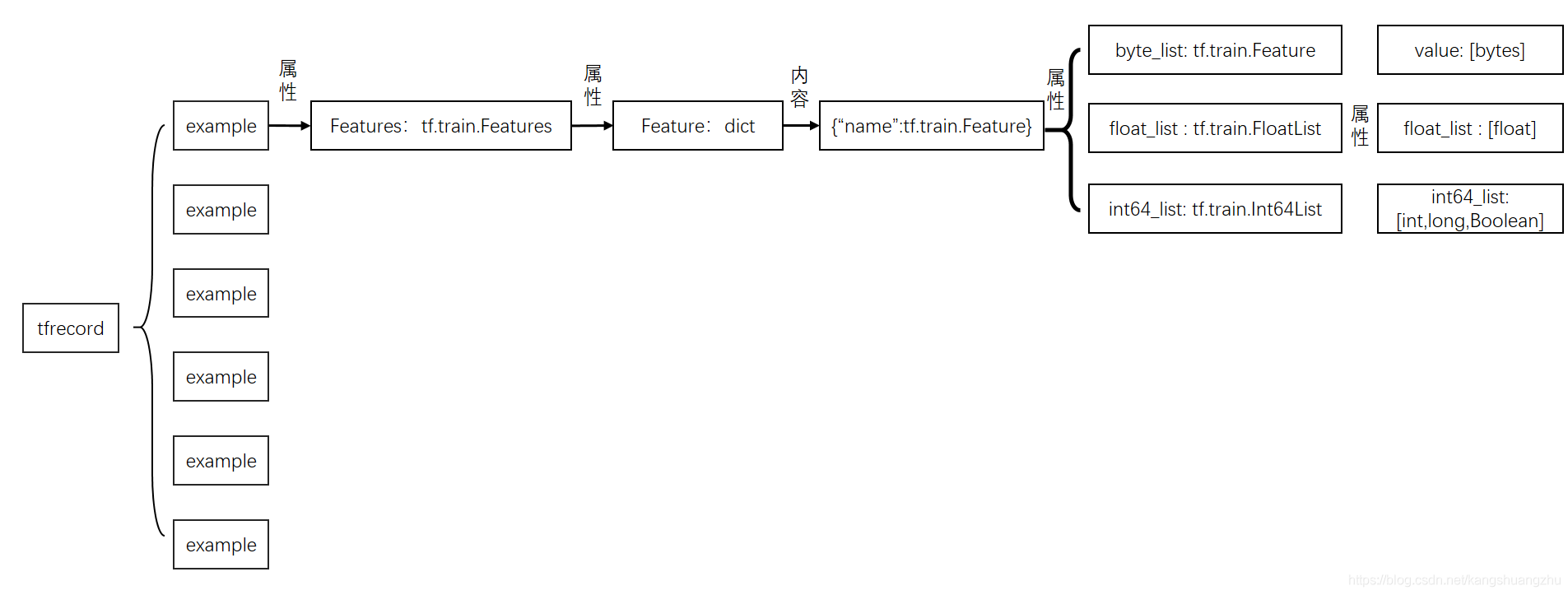
TFRecord TFRecord 是谷歌推荐的一种二进制文件格式,理论上它可以保存任何格式的信息。 tf.Example是一个Protobuffer定义的message,表达了一组string到bytes value的映射。TFRecord文件里面其实就是存储的序列化的tf.Example。关于Protobuffer参考Protobuf 终极教程。 example 我们可以具体到相关代码去详细地看下tf.Example的构成。作为一个Protobuffer message,它被定义在文件core/example/example.proto中: [代码] 只是包了一层Features的message。我们还需要进一步去查找Features的message定义: [代码] 到这里,我们可以看出...
PyTorch中,所有神经网络的核心是 autograd 包。 autograd 包为张量上的所有操作提供了自动求导机制。它是一个在运行时定义(definebyrun)的框架,这意味着反向传播是根据代码如何运行来决定的,并且每次迭代可以是不同的. 让我们用一些简单的例子来看看吧。 张量 torch.Tensor 是这个包的核心类。如果设置它的属性 .requires_grad 为 True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用 .backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性. 要阻止一个张量被跟踪历史,可以调用 .detach() 方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。 为了防止跟踪历史记录(和使用内存),...
Deep Learning
2026-01-11

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 1、Upsampling(上采样)[没有学习过程] 在FCN、Unet等网络结构中,涉及到了上采样。上采样概念:上采样指的是任何可以让图像变成更高分辨率的技术。最简单的方式是重采样和插值:将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在torch.nn中的Vision Layers里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d 0)PixelShuffl...
Python
2026-01-11
相同点 nn.Xxx和nn.functional.xxx的实际功能是相同的,即nn.Conv2d和nn.functional.conv2d 都是进行卷积,nn.Dropout 和nn.functional.dropout都是进行dropout,。。。。。; 运行效率也是近乎相同。 nn.functional.xxx是函数接口,而nn.Xxx是nn.functional.xxx的类封装,并且nn.Xxx都继承于一个共同祖先nn.Module。这一点导致nn.Xxx除了具有nn.functional.xxx功能之外,内部附带了nn.Module相关的属性和方法,例如train(), eval(),load_state_dict, state_dict 等。 不同点 两者的调用方式不同。 nn.X...