Generative Model
2026-01-11
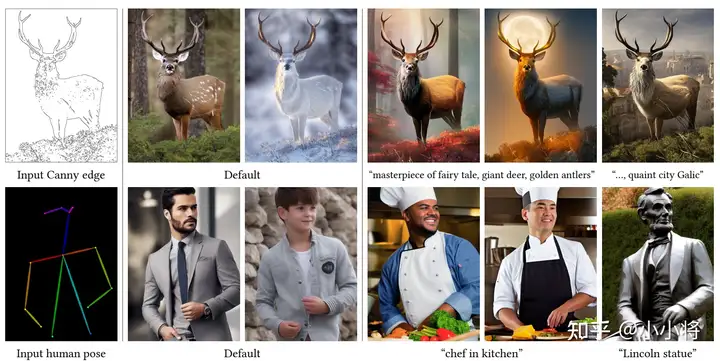
ControlNet应该算是2023年文生图领域最重要的工作,它让文生图模型Stable Diffusion实现了文本之外的可控生成,让AI绘画实现了质的飞跃。这篇文章我们将简单总结一下ControlNet技术细节。 模型设计 ControlNet的模型结构如下所示,这里是直接复制一份SD的上半部分:Encoder和中间的Middle Block。 ControlNet的输入和原始的SD一样,包括noisy latents、time embedding以及text embedding。除此之外,ControlNet还需要引入额外的condition,这个condition是和原图一样大小的图像,比如canny边界图或者人体骨架图。这里并没有像SD那样采用VAE对condition进行编码,而...