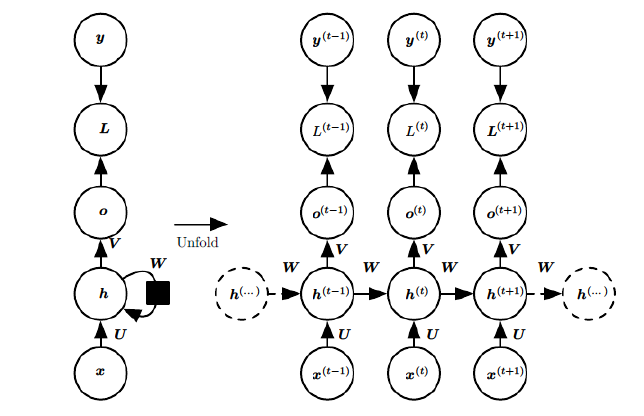
RNN 概述 在前面讲到的DNN和CNN中,训练样本的输入和输出是比较的确定的。但是有一类问题DNN和CNN不好解决,就是训练样本输入是连续的序列,且序列的长短不一,比如基于时间的序列:一段段连续的语音,一段段连续的手写文字。这些序列比较长,且长度不一,比较难直接的拆分成一个个独立的样本来通过DNN/CNN进行训练。 而对于这类问题,RNN则比较的擅长。那么RNN是怎么做到的呢?RNN假设我们的样本是基于序列的。比如是从序列索引1到序列索引 τ 。对于这其中的任意序列索引号 t ,它对应的输入是对应的样本序列中的 x(t) 。而模型在序列索引号 t 位置的隐藏状态 h(t) ,则由 x(t) 和在 t−1 位置的隐藏状态 h(t−1) 共同决定。在任意序列索引号 t ,我们也有对应的模型预测...
Generative Model
2026-01-11

背景 本文主要是《NICE: Nonlinear Independent Components Estimation》一文的介绍和实现。这篇文章也是glow这个模型的基础文章之一,可以说它就是glow的奠基石。 艰难的分布 众所周知,目前主流的生成模型包括VAE和GAN,但事实上除了这两个之外,还有基于flow的模型(flow可以直接翻译为“流”,它的概念我们后面再介绍)。事实上flow的历史和VAE、GAN它们一样悠久,但是flow却鲜为人知。在我看来,大概原因是flow找不到像GAN一样的诸如“造假者鉴别者”的直观解释吧,因为flow整体偏数学化,加上早期效果没有特别好但计算量又特别大,所以很难让人提起兴趣来。不过现在看来,OpenAI的这个好得让人惊叹的、基于flow的glow模型,估...
Generative Model
2026-01-11
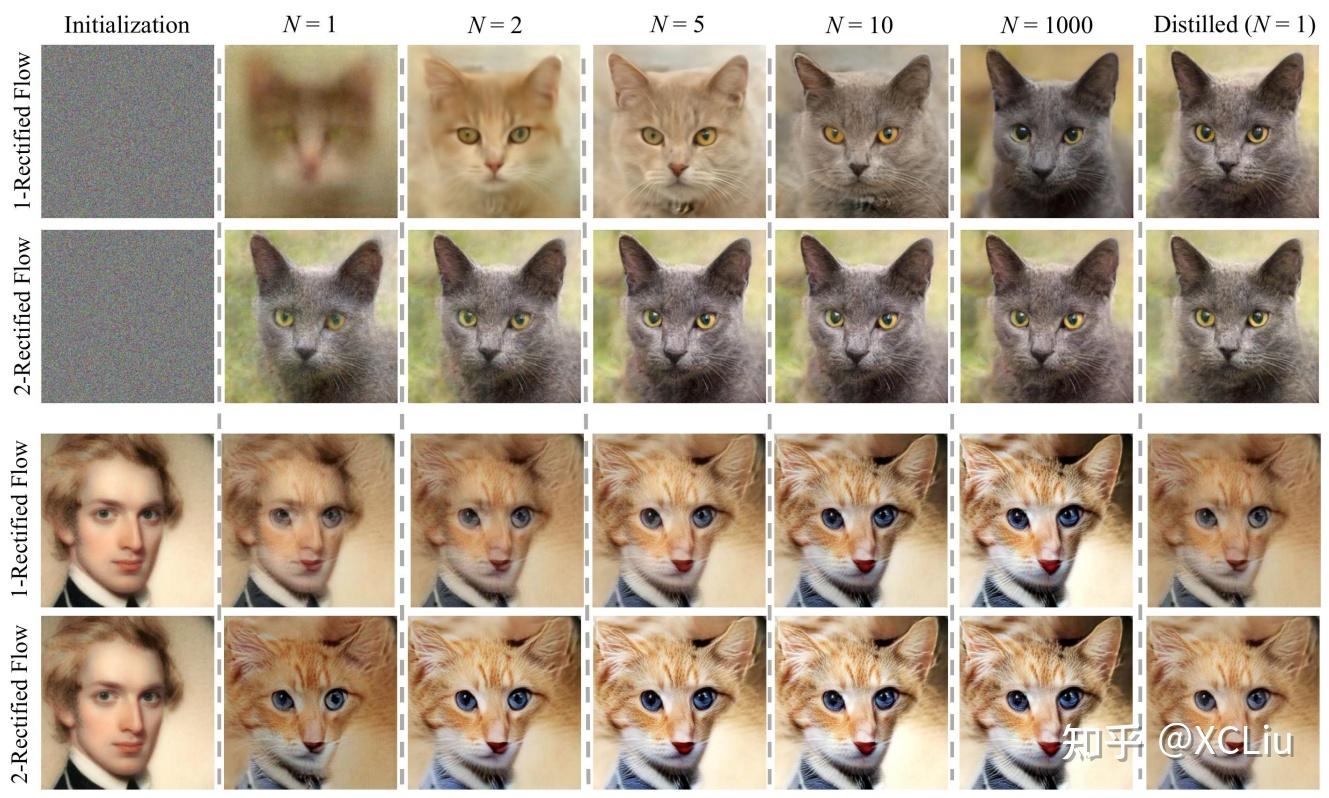
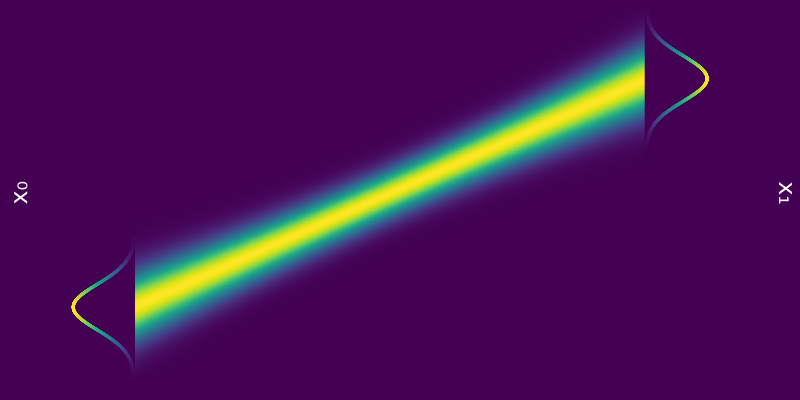
💡 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE。 细想上述过程,可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程 像GAN这样的生成模型,它本质上是希望找到一个确定性变换,能将从简单分布(如标准正态分布)采样出来的随机变量,变换为特定数据分布的样本。flow模型也是生成模型之一,它的思路是反过来,先找到一个能将数据分布变换简单分布的可逆变换,再求解相应的逆变换来得到一个生成模型。 ...
Large Model
2026-01-11

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路,丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存...
Generative Model
2026-01-11
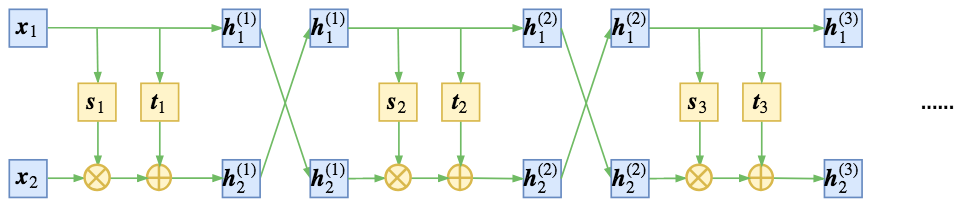
精巧的flow 不得不说,flow模型是一个在设计上非常精巧的模型。总的来看,flow就是想办法得到一个encoder将输入 𝑥 编码为隐变量 𝑧,并且使得 𝑧 服从标准正态分布。得益于flow模型的精巧设计,这个encoder是可逆的,从而我们可以立马从encoder写出相应的decoder(生成器)出来,因此,只要encoder训练完成,我们就能同时得到decoder,完成生成模型的构建。 为了完成这个构思,不仅仅要使得模型可逆,还要使得对应的雅可比行列式容易计算,为此,NICE提出了加性耦合层,通过多个加性耦合层的堆叠,使得模型既具有强大的拟合能力,又具有单位雅可比行列式。就这样,一种不同于VAE和GAN的生成模型——flow模型就这样出来了,它通过巧妙的构造,让我们能直接去拟合概率分...
NLP
2026-01-11

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了Transformer。Transformer 是Google Brain 2017的提出的一篇工...
Generative Model
2026-01-11
💡 Flowbased Models Normalizing Flow Normalizing Flow 是一种基于变换对概率分布进行建模的模型,其通过一系列离散且可逆的变换实现任意分布与先验分布(例如标准高斯分布)之间的相互转换。在 Normalizing Flow 训练完成后,就可以直接从高斯分布中进行采样,并通过逆变换得到原始分布中的样本,实现生成的过程。(有关 Normalizing Flow 的详细理论) 从这个角度看,Normalizing Flow 和 Diffusion Model 是有一些相通的,其做法的对比如下表所示。从表中可以看到,两者大致的过程是非常类似的,尽管依然有些地方不一样,但这两者应该可以通过一定的方法得到一个比较统一的表示。 Continuous Norma...
问题表示 有很多概率问题,尤其是独立重复实验问题,如果用生成函数的方法来做,会显得特别方便。本文要讲的“随机游走”问题便是其中一例,它又被形象地叫做“醉汉问题”,其本质上是一个二项分布,但是由于取了极限,出现了很多新的性质和应用。我们先考虑如下问题: 考虑实数轴上的一个粒子,在 t=0 时刻它位于原点,每过一秒,它要不向前移动一格(+1),要不就向后移动一格(1),问 n 秒后它所处位置的概率分布。 不难发现,这个问题跟二项分布是雷同的。如果把这个粒子形象比喻成一个“喝醉酒的人”,那么上面的走法就类似于一个完全不省人事的醉汉走路问题了。(当然,醉汉是在三维空间走路的,这里简单起见,只描述了一维...
Generative Model
2026-01-11

🔖 https://stability.ai/news/stablediffusion3researchpaper 概述 SD3 模型与训练策略改进细节 SD3除了将去噪网络从 UNet 改成 DiT 外,SD3 还在模型结构与训练策略上做了很多小改进: 改变训练时噪声采样方法 将一维位置编码改成二维位置编码 提升 VAE 隐空间通道数 对注意力 QK 做归一化以确保高分辨率下训练稳定 本文会简单介绍这些改进。 论文阅读 核心贡献 介绍 Stable Diffusion 3 (SD3) 的文章标题为 Scaling Rectified Flow Transformers for HighResolution Image Synthesis。与其说它是一篇技术报告,更不如说它是一篇论文,因为它...
NLP
2026-01-11

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4,不算太老,而SSM最新最火的变体大概是Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mam...
问题定义 多元二次多项式,维度为 n ,那么可以用以下公式描述该函数: [Formula] 其中 a_{i,j} 为二次项系数,共有 n^2 项, 1≤i,j≤n ,且所有的 a 不全为0,即 ∃a_{i,j}≠0 ; b_k 为一次项系数,共 n 项, 1≤k≤n ; c 为常数项。 记 f(x)=[x_1,x_2,...,x_n]^T ,则上述函数可以写作二次型的形式: 转化过程中A,b满足: A 为n阶对称方阵, A_{i,j}=a_{i,j} 因为 ∃a_{i,j}≠0 ,A不为零矩阵 b_i=b_i 为了后续计算简便,我们将二次型稍作改动: [Formula] 我们的目标就是寻找该函...
基本概念 方向导数:是一个数;反映的是 f(x,y) 在 P_0 点沿方向 v 的变化率。 偏导数:是多个数(每元有一个);是指多元函数沿坐标轴方向的方向导数,因此二元函数就有两个偏导数。 偏导函数:是一个函数;是一个关于点的偏导数的函数。 梯度:是一个向量;每个元素为函数对一元变量的偏导数;它既有大小(其大小为最大方向导数),也有方向。 方向导数 反映的是 f(x,y) 在 P_0 点沿方向 v 的变化率。 例子如下: 题目 设二元函数 f(x, y) = x^2 + y^2 ,分别计算此函数在点 (1, 2) 沿方向 w=\{3, 4\} 与方向 u=\{1, 0\} 的方向导数。 解: ...