补充知识 表示学习 (Representation Learning): 学习数据的表征,以便在构建分类器或其他预测器时更容易提取有用的信息 ,无监督学习也属于表示学习。 互信息 (Mutual Information):表示两个变量 \(X\) 和 \(Y\) 之间的关系,定义为: \[I(X;Y)=\sum_{x\in X}\sum_{y\in Y}p(x,y)log\frac{p(x|y)}{p(x)}\] 对比损失(contrastive loss) :计算成对样本的匹配程度,主要用于降维中。计算公式为: \[L=\frac{1}{2N}\sum_{n-1}^N[yd^2+(1-y)max(margin-d, 0)^2]\] 其中, \(d=\sqrt{(a_n-b_n)^2}\) 为两个样本的欧式距离, \(y=\{0,1\}\) 代表两个样本的匹配程度, \(margin\) 代表设定的阈值。这种损失函数可以很好的表达成对样本的匹配程度,也能够很好用于训练提取特征的模型。当 \( y=1\) (即样本相似)时,损失函数只剩下 \(∑d^2\)...
Self-Supervised
2026-01-23

从 NLP 入手 n-gram 语言模型(language model)就是假设一门语言所有可能的句子服从一个概率分布,每个句子出现的概率加起来是1,那么语言模型的任务就是预测每个句子在语言中出现的概率。如果把句子 \(s\) 看成单词 \(w\) 的序列 \(s=\{w_1,w_2,...,w_m\}\) ,那么语言模型就是建模一个 \(p(w_1,w_2,...,w_m)\) 来计算这个句子 \(s\) 出现的概率,直观上我们要得到这个语言模型,基于链式法则可以表示为每个单词出现的条件概率的乘积,我们将条件概率的条件 \((w_1,w_2,...,w_{i-1})\) 称为单词 \(w_i\) 的上下文,用 \(c_i\) 表示。 \[\begin{aligned} p\left(w_{1}, w_{2}, \ldots, w_{m}\right)&=p\left(w_{1}\right) * p\left(w_{2} \mid w_{1}\right) * p\left(w_{3} \mid w_{1}, w_{2}\right) \ldots p\left(w_{m}...
Large Model
2026-01-20
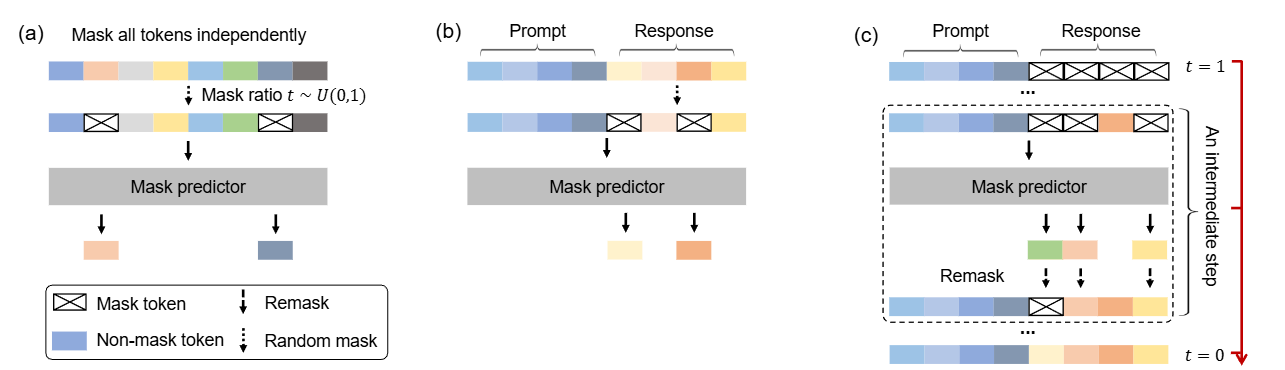
这是一篇尝试改变LLM「范式」的文章:当前主流的LLM架构都是「自回归」的,通俗地理解就是必须「从左到右依次生成」。这篇文章挑战了这一范式,探索扩散模型在 LLMs 上的可行性,通过 随机掩码 - 预测 的逆向思维,让模型学会「全局思考」。 论文: [2502.09992] Large Language Diffusion Models 背景 主流大语言模型架构:自回归模型 (Autoregressive LLMs) 过去几年, 自回归模型(Autoregressive Models, ARMs)一直是大语言模型(LLM)的主流架构。典型的自回归语言模型以Transformer解码器为基础,按照从左到右 的顺序依次预测下一个词元(token)。 形式化地,自回归模型将一个长度为 \(N\) 的文本序列 \(X=(x_1, x_2, ..., x_N)\) 的概率分解为各位置的条件概率连乘积: \[P_{\theta}(x_1, x_2, \dots, x_N) = \prod_{i=1}^{N} P_{\theta}(x_i \mid x_1, x_2, \dots,...
Large Model
2026-01-20
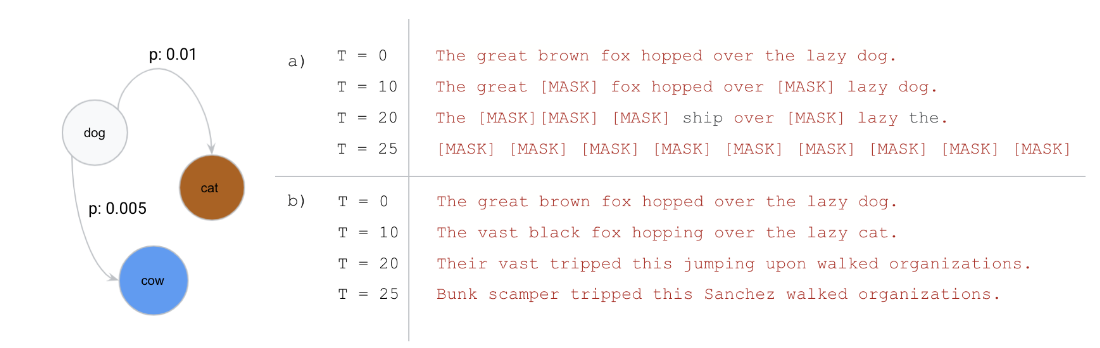
引言 Diffusion模型近年来在图像生成这一连续域任务中取得了显著成果,展现出强大的生成能力。然而,在文本生成这一离散域任务中整体效果仍不尽如人意,未能在该领域引起广泛关注。 去年,一篇研究离散扩散模型在文本生成的文章《Discrete Diffusion Modeling by Estimating the Ratios of the Data Distribution》获得ICML 2024的Best Paper,引发了学术界的广泛兴趣,也激发了新一轮的研究热潮。随后在2025年,越来越多高校和企业也开始积极探索基于Diffusion的文本生成方法。其中,近期备受关注的Block Diffusion也成功入选ICLR oral,进一步推动了该方向的发展。...
Generative Model
2026-01-19

💡 扩散模型:通过加噪的方式去学习原始数据的分布, 从学到的分布中去生成样本 DDPM 关键点: 1. 正向加噪是离散时间马尔可夫链:从 \(x_0\) 逐步加噪得到 \(x_1,x_2,...,x_T\) ;在合适的噪声调度与足够大的 \(T\) 下, \(x_T\) 近似服从 \( N(0,I) \) 的各向同性高斯。 2. 每一步噪声方差 \(β_t\) 满足 \(0<β_t<1\) ,通常随 \(t\) 增大;因此 \(q(x_t|x_{t-1}) \) 的均值缩放系数 \(\sqrt{1-β_t} \) 逐渐减小。 3. 训练通过最大化对数似然的变分下界(ELBO)来学习反向过程 \( p_θ(x_{t-1}|x_t)\) ,并将其参数化为高斯分布(神经网络预测均值/噪声或 score)。 4. 将目标写成 score/DSM 形式时,loss 的权重与对应噪声层的方差尺度(如 \(1-\bar{α}_t\) 或相关量)有关;采样通常是按学习到的反向转移逐步生成(祖先采样),与经典 Langevin MCMC 更新形式不同,但可在 SDE 视角下统一理解。...
Generative Model
2026-01-19
基于文章 《Elucidating the Design Space of Diffusion-Based Generative Models》 来统一扩散模型框架 通用扩散模型框架推导 加噪公式 Flow Matching的一步加噪公式 \[\mathbf{x}_t=(1-t)\mathbf{x}_0+t\varepsilon\] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;(1-t)\mathbf{x}_0,t^2\mathbf{I})\] Score Matching的一步加噪公式 \[\mathbf{x}_t=\mathbf{x}_0+\sigma_t\varepsilon \] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;\mathbf{x}_0,\sigma_t^2\mathbf{I})\] DDPM/DDIM的一步加噪公式...
Generative Model
2026-01-18
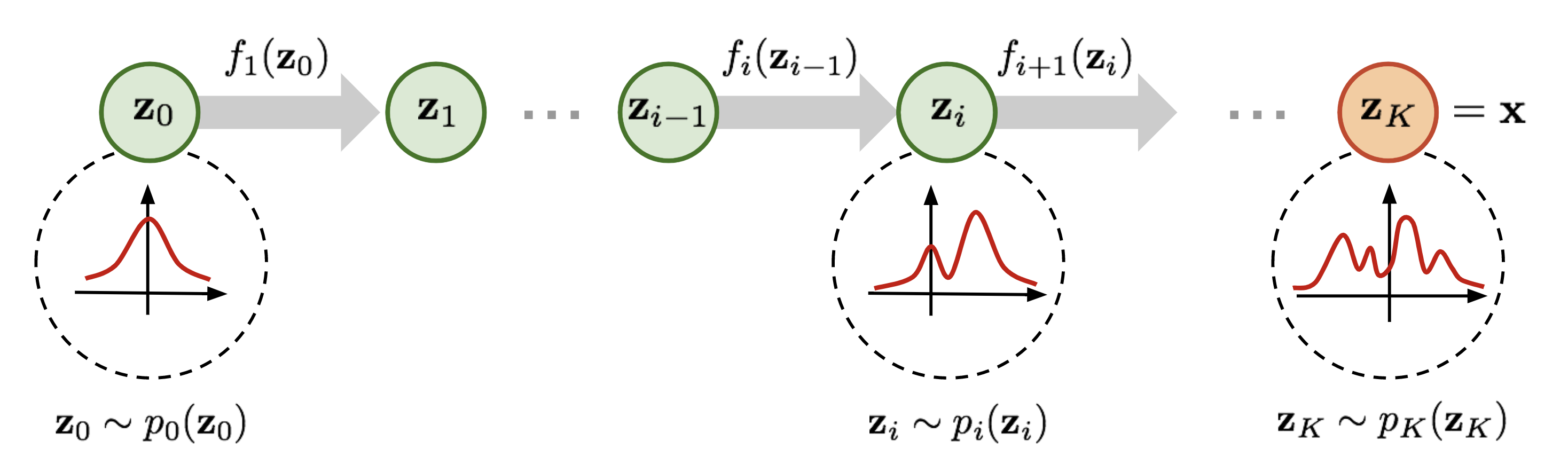
Normalizing flow(标准化流)是一类对概率分布进行建模的工具,它能完成简单的概率分布(例如高斯分布)和任意复杂分布之间的相互转换,经常被用于 data generation、density estimation、inpainting 等任务中,例如 Stability AI 提出的 Stable Diffusion 3 中用到的 rectified flow 就是 normalizing flow 的变体之一。 为了便于理解,在正式开始介绍之前先简要说明一下 normalizing flow 的做法。如上图所示,为了将一个高斯分布 \(z_0\) 转换为一个复杂的分布 \(z_K\) ,normalizing flow 会对初始的分布 \(z_0\) 进行多次可逆的变换,将其逐渐转换为 \(z_K\) 。由于每一次变换都是可逆的,从 \(z_K\) 出发也能得到高斯分布 \(z_0\) 。这样,我们就实现了复杂分布与高斯分布之间的互相转换,从而能从简单的高斯分布建立任意复杂分布。 对 diffusion models 比较熟悉的读者可能已经发现了,这个过程和...
Self-Supervised
2026-01-11

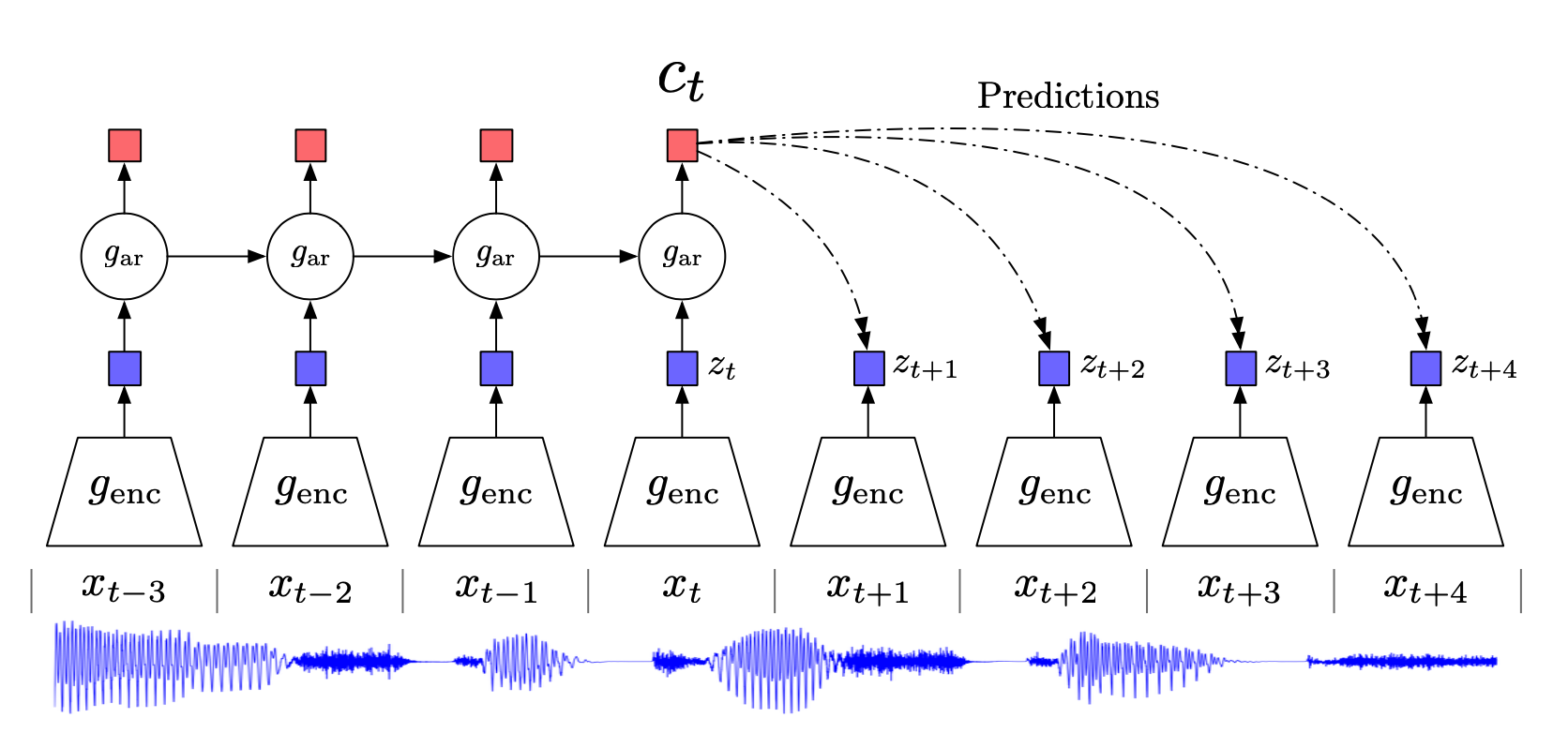
相关内容 自监督学习(Selfsupervised):属于无监督学习,其核心是自动为数据打标签(伪标签或其他角度的可信标签,包括图像的旋转、分块等等),通过让网络按照既定的规则,对数据打出正确的标签来更好地进行特征表示,从而应用于各种下游任务。 互信息(Mutual Information):表示两个变量 X 和 Y 之间的关系,定义为: 噪声对抗估计(Noise Contrastive Estimation, NCE):在NLP任务中一种降低计算复杂度的方法,将语言模型估计问题简化为一个二分类问题。 Introduction 无监督学习一个重要的问题就是学习有用的 representation,本文的目的就是训练一个 representation learning 函数(即编码器encod...
3D Model
2026-01-11

三维深度学习简介 多视角(multiview):通过多视角二维图片组合为三维物体,此方法将传统CNN应用于多张二维视角的图片,特征被view pooling procedure聚合起来形成三维物体; 体素(volumetric):通过将物体表现为空间中的体素进行类似于二维的三维卷积(例如,卷积核大小为5x5x5),是规律化的并且易于类比二维的,但同时因为多了一个维度出来,时间和空间复杂度都非常高,目前已经不是主流的方法了; 点云(point clouds):直接将三维点云抛入网络进行训练,数据量小。主要任务有分类、分割以及大场景下语义分割; 非欧式(manifold,graph):在流形或图的结构上进行卷积,三维点云可以表现为mesh结构,可以通过点对之间临接关系表现为图的结构。 点云的特性...

概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translationinvariance和permutationinvariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例...

Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用(r, θ)两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的(r, θ),在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数(r, θ)就在每条曲线中都存在,所以看起来就像是多条曲线相交在(r,θ)。可以用多条曲线投票的方式来看,其他点都是很少的票数,而(r,θ)则票数很多,所以直线的参数就是(r,θ)。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数...